技术特征:
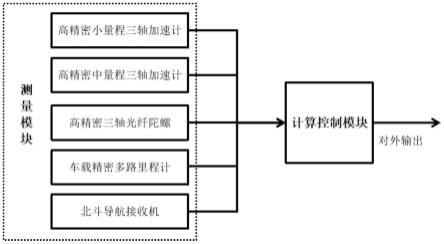
1.一种重力加速度和定位定向的测量系统,其特征在于,该系统包括:测量模块,包括具有独立采集通道的小量程三轴加速度计、中量程三轴加速度计及三轴光纤陀螺;计算控制模块,实时采集所述小量程三轴加速度计输出的第一路信号、所述中量程三轴加速度计输出的第二路信号及所述三轴光纤陀螺输出的第三路信号进行融合处理;所述融合处理为:所述计算控制模块判定所述小量程三轴加速度计的量程范围是否包括车载发动机振动信号范围;在包括的情况下,所述计算控制模块利用所述第三路信号修正所述第一路信号并进行处理后同时输出修正后的所述重力加速度值和所述定位定向数据;在不包括的情况下,所述计算控制模块利用所述第一路信号和所述第三路信号修正所述第二路信号并进行处理后输出修正后的所述定位定向数据。2.如权利要求1所述的一种重力加速度和定位定向的测量系统,其特征在于,所述测量模块还包括车载精密多路里程计和/或北斗导航接收机;所述计算控制模块还接收所述车载精密多路里程计和/或所述北斗导航接收机输出的第四路信号,利用所述第四路信号对所述第二路信号修正后得到第五信号,再利用所述第一路信号和所述第三路信号对所述第五信号进行修正处理后输出修正处理后的所述定位定向数据。3.如权利要求1或2所述的一种重力加速度和定位定向的测量系统,其特征在于,所述小量程三轴加速度计测量精度≤1mgal,测量量程为
±
2g。4.如权利要求1所述的一种重力加速度和定位定向的测量系统,其特征在于,所述中量程三轴加速度计测量精度≤20mgal,测量量程为
±
10g;所述三轴光纤陀螺测量精度≤0.001
°
/h,测量量程为
±
80
°
/s。5.如权利要求2所述的一种重力加速度和定位定向的测量系统,其特征在于,所述所述车载精密多路里程计至少包括两路,分别设于车载左右的车轮上,测量精度不低于3600线/周。6.一种车载重力加速度和定位定向的高精度测量方法,其特征在于,该方法包括:获取小量程三轴加速度计输出的第一路信号、中量程三轴加速度计输出的第二路信号、三轴光纤陀螺输出的第三路信号及车载发动机振动范围;判定所述小量程三轴加速度计的量程范围是否包括所述车载发动机振动范围,若包括,则利用所述第三路信号修正所述第一路信号并进行处理后同时输出修正后的所述重力加速度值和所述定位定向数据;若不包括,则利用所述第一路信号和所述第三路信号修正所述第二路信号并进行处理后输出修正后的所述定位定向数据。7.如权利要求6所述的一种重力加速度和定位定向的测量方法,其特征在于,所述第二路信号还能与车载精密多路里程计和/或北斗导航接收机输出的第四路信号融合;利用所述第四路信号对所述第二路信号修正后得到第五信号,再利用所述第一路信号和所述第三路信号对所述第五信号进行修正处理后输出修正处理后的所述定位定向数据。8.如权利要求6或7所述的一种重力加速度和定位定向的测量方法,其特征在于,所述
小量程三轴加速度计测量精度≤1mgal,测量量程为
±
2g。9.如权利要求6所述的一种重力加速度和定位定向的测量方法,其特征在于,所述中量程三轴加速度计测量精度≤20mgal,测量量程为
±
10g;所述三轴光纤陀螺测量精度≤0.001
°
/h,测量量程为
±
80
°
/s。10.如权利要求7所述的一种重力加速度和定位定向的测量方法,其特征在于,所述所述车载精密多路里程计至少包括两路,分别设于车载左右的车轮上,测量精度不低于3600线/周。
技术总结
本发明提出的一种重力加速度和定位定向的测量系统及方法,该系统包括测量模块和计算控制模块,计算控制模块获取小量程三轴加速度计输出的第一路信号、中量程三轴加速度计输出的第二路信号、三轴光纤陀螺输出的第三路信号及车载发动机振动范围并判定小量程三轴加速度计的量程范围是否包括车载发动机振动信号范围,若包括,计算控制模块利用第三路信号修正第一路信号并进行处理后同时输出修正后的重力加速度值和定位定向数据;若不包括,计算控制模块利用第一路信号和第三路信号修正第二路信号并进行处理后输出修正后的定位定向数据。不仅实现了同时测量当地重力加速度值和定位定向数据,而且具备较高的测量精度。而且具备较高的测量精度。而且具备较高的测量精度。
技术研发人员:王勇刚 胡琪波 白会彦 陈哲 李亚珍
受保护的技术使用者:湖北三江航天红峰控制有限公司
技术研发日:2022.11.09
技术公布日:2023/2/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。