1.本发明涉及故障线路测距技术领域,尤其涉及一种直流电缆线路的行波测距方法及装置。
背景技术:
2.随着我国电力事业蓬勃快速地发展,大量长距离高压或超高压输电线路暴露在旷野,且在我国多为山区丘陵地形,暴雨、闪电等天气原因以及人为因素常常使线路发生故障。输电线路故障点的快速、精确定位,一直是电力部门尚未彻底解决的难题,对电力系统的安全、优质、经济运行构成较大威胁,也给线路运行维护人员带来了繁重的负担,给用电部门带来了难以估计的损失。输电线路故障后快速、准确地确定故障点是保障电网安全稳定运行的一项关键技术,也是长期困扰电网运行的主要难题之一。
3.目前,输电线路测距装置的故障测距算法主要有2类,一类是阻抗法,是直接计算故障阻抗或其百分比的算法;另一类是行波法,利用高频故障暂态电流、电压的行波等判定故障点距离测量点的距离。阻抗法容易受故障位置、故障类型和过渡电阻的影响,导致测距误差较大,因此不适用于高精度要求的电缆故障测距。而对于行波测距法,无论是单端法还是双端法,在计算故障距离都采用的是统一的波速度,未考虑实际情况中波阻抗和波速度不一致的情况,尤其是海缆陆缆混合以及存在电缆接头的情况,这将会带来测距误差。另一方面,由于行波是高频暂态奇异信号,在传播过程中会出现色散情况,导致波头识别不准确,带来测距误差。
4.因此,提出一种直流电缆线路的行波测距方法及装置,来解决现有的单一波速度问题以及波头识别不准确的现状,是本领域技术人员亟需解决的问题。
技术实现要素:
5.有鉴于此,本发明提供了一种直流电缆线路的行波测距方法及装置,用于实现精确的故障测距。
6.为了实现上述目的,本发明采用如下技术方案:
7.一种直流电缆线路的行波测距方法,在直流电缆线路两端安装行波测距装置,包括以下步骤:
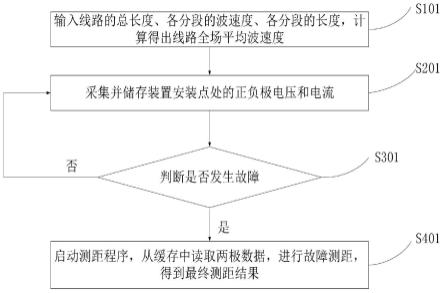
8.s101.参数输入步骤:输入线路的总长度、各分段的波速度、各分段的长度,计算得出线路全场平均波速度;
9.s201.数据采集步骤:按照预设采样速率在行波测距装置安装点处进行正负极电压数据和电流数据的采集和存储;
10.s301.故障发生判断步骤:判断线路是否发生故障,若为是,则进入s401,否则返回s201;
11.s401.行波测距步骤:启动测距程序,从缓存中读取正负极电压数据和电流数据,进行故障测距,得到最终测距结果。
12.可选的,s201中的预设采样速率不低于1mhz。
13.可选的,s201中的数据存储方式为间隔固定时间的循环覆盖。
14.可选的,s301中判断线路是否发生故障的具体内容为:根据直流线路保护装置是否动作,如直流线路保护装置出口动作于对应开关,则判断为线路中发生了故障。
15.可选的,s401具体包括以下步骤:
16.s4011.对读取的两极数据进行极模变换算法解耦,提取线模分量;
17.s4012.对线模分量进行小波变换并求取模极大值,得到模极大值集合;
18.s4013.在模极大值集合中定位第一个模极大值出现时刻,并作平均值处理,该时刻则为初始故障行波波头到达测量点的时刻;
19.s4014.利用平均波速度进行初步故障测距,得到初步故障测距结果,并进行区段定位以及提取定位区段的线路信息;
20.s4015.利用得到的定位区段的线路信息和线路全长平均波速度对初步故障测距结果进行修正,求解得出最终故障测距结果。
21.可选的,s4011中的极模变换公式如下
[0022][0023]
其中,x0为两极线路间的零模电气量,也称为共模电气量;x1为两极线路间的线模电气量,也称为差模电气量;x
为两极线路中正级线路的电气量;x-为两极线路中负级线路的电气量。
[0024]
可选的,s4014.中的线路信息包括该区段线路长度和波速度。
[0025]
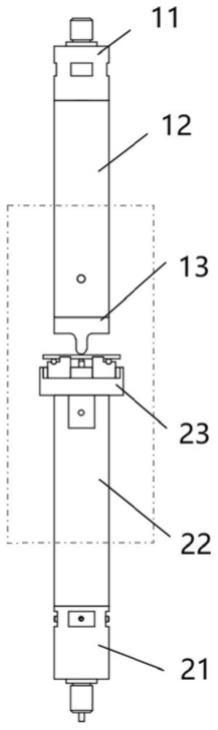
一种直流电缆线路的行波测距装置,利用上述的一种直流电缆线路的行波测距方法,包括:输入模块、数据采集模块、单片机和测距模块;
[0026]
输入模块,与单片机的第一输入端连接,用于输入线路的总长度、各分段的波速度、各分段的长度;
[0027]
数据采集模块,与单片机的第二输入端连接,用于按照预设采样速率进行行波测距装置安装点处正负极电压数据和电流数据的采集和存储;
[0028]
单片机,用于基于输入模块输入的参数,计算得出线路全场平均波速度,同时用于判断线路是否发生故障,以及根据判断结果选择是否发出启动行波测距指令至行波测距模块;
[0029]
行波测距模块,与单片机的输出端连接,接收启动行波测距指令启动测距程序,从缓存中读取正负极电压数据和电流数据,进行故障测距,得到最终测距结果。
[0030]
经由上述的技术方案可知,与现有技术相比,本发明提供了一种直流电缆线路的行波测距方法及装置:采用高频采样单元,并利用极模变换解耦和小波变换技术,实现了对于故障行波时间信息的准确提取,使故障测距结果更为精准;能够有效提高测距的准确度,实现快速和精确的故障测距以缩短检修时间、减少停电损失。
附图说明
[0031]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0032]
图1为本发明提供的一种直流电缆线路的行波测距方法流程图;
[0033]
图2为本发明提供的行波测距步骤流程图;
[0034]
图3为本发明具体行波测距流程图;
[0035]
图4为本发明提供的一种直流电缆线路的行波测距装置结构框图;
[0036]
图5为不同波速度分段线路示意图;
[0037]
图6为海上风电直流输电系统结构框图;
[0038]
图7为如东海上风电送出系统拓扑图;
[0039]
图8为测试海缆线路的波速度,其中8.1为原始波形,8.2为多尺度分析下的模极大值;
[0040]
图9为测试陆缆线路的波速度,其中9.1为原始波形,9.2为多尺度分析下的模极大值;
[0041]
图10为测试线路全长的波速度,其中10.1为原始波形,10.2为多尺度分析下的模极大值。
具体实施方式
[0042]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0043]
参照图1所示,本发明公开了一种直流电缆线路的行波测距方法,在直流电缆线路两端安装行波测距装置,包括以下步骤:
[0044]
s101.参数输入步骤:输入线路的总长度、各分段的波速度、各分段的长度,计算得出线路全场平均波速度;
[0045]
s201.数据采集步骤:按照预设采样速率在行波测距装置安装点处进行正负极电压数据和电流数据的采集和存储;
[0046]
s301.故障发生判断步骤:判断线路是否发生故障,若为是,则进入s401,否则返回s201;
[0047]
s401.行波测距步骤:启动测距程序,从缓存中读取正负极电压数据和电流数据,进行故障测距,得到最终测距结果。
[0048]
进一步的,s201中的预设采样速率不低于1mhz。
[0049]
进一步的,s201中的数据存储方式为间隔固定时间的循环覆盖。
[0050]
进一步的,s301中判断线路是否发生故障的具体内容为:根据直流线路保护装置是否动作,如直流线路保护装置出口动作于对应开关,则判断为线路中发生了故障。
[0051]
进一步的,参见图2所示,s401具体包括以下步骤:
[0052]
s4011.对读取的两极数据进行极模变换算法解耦,提取线模分量;
[0053]
s4012.对线模分量进行小波变换并求取模极大值,得到模极大值集合;
[0054]
s4013.在模极大值集合中定位第一个模极大值出现时刻,并作平均值处理,该时
刻则为初始故障行波波头到达测量点的时刻;
[0055]
s4014.利用平均波速度进行初步故障测距,得到初步故障测距结果,并进行区段定位以及提取定位区段的线路信息;
[0056]
s4015.利用得到的定位区段的线路信息和线路全长平均波速度对初步故障测距结果进行修正,求解得出最终故障测距结果。
[0057]
更进一步的,s4011中的极模变换公式如下
[0058][0059]
其中,x0为两极线路间的零模电气量,也称为共模电气量;x1为两极线路间的线模电气量,也称为差模电气量;x
为两极线路中正级线路的电气量;x-为两极线路中负级线路的电气量。
[0060]
更进一步的,在s4013中通过对比2-4层中的模极大值间的大小关系来提出噪声干扰的影响。
[0061]
在s4015中,在2-4层模极大值集合中定位第一个模极大值出现时刻,并做平均值处理,该时刻即为初始故障行波泊头到达测量点的时刻。
[0062]
更进一步的,s4014中的线路信息包括该区段线路长度和波速度。
[0063]
参见图3所示,本发明具体给出了利用行波测距装置进行故障测距的流程。
[0064]
参见图4所示,本发明还公开了一种直流电缆线路的行波测距装置,利用上述的一种直流电缆线路的行波测距方法,包括:输入模块、数据采集模块、单片机和测距模块;
[0065]
输入模块,与单片机的第一输入端连接,用于输入线路的总长度、各分段的波速度、各分段的长度;
[0066]
数据采集模块,与单片机的第二输入端连接,用于按照预设采样速率进行行波测距装置安装点处正负极电压数据和电流数据的采集和存储;
[0067]
单片机,用于基于输入模块输入的参数,计算得出线路全场平均波速度,同时用于判断线路是否发生故障,以及根据判断结果选择是否发出启动行波测距指令至行波测距模块;
[0068]
行波测距模块,与单片机的输出端连接,接收启动行波测距指令启动测距程序,从缓存中读取正负极电压数据和电流数据,进行故障测距,得到最终测距结果。
[0069]
进一步的,采用fpga控制ad进行高速采样。
[0070]
参见图5所示,本发明还对精确故障测距算法原理进行了说明,具体内容如下:
[0071]
直线代表电缆线路,圆圈代表接头或分段点(包括起始点和中间点)。电缆线路起始端为0号点,末端为n号点。电缆单位长度为l,电缆共有n分段,电缆总长为l=nl;在0号点与1号点之间的单位长度线路上,波速度记为v1,传播时间记为t1,同理,对于i号点与i-1号点之间的线路,其波速度记为vi,传播时间记为ti,所以在n-1号点与n号点之间的单位长度线路上,波速度记为vn,传播时间记为tn。
[0072]
若行波从0号点(线路始端)传递到n号点线路末端总共用时为利用实验
方法测波速度时,得到平均波速度为即对于具体线路,上述vi,ti(i=1,2
…
n)和在运行之前通过实验获取,作为实现故障测距所需的数据信息,这一组信息需要输入到装置的线路信息储存程序当中去。
[0073]
设故障发生在a号与a 1号点之间的一段上,故障点与始端距离为l1=(a ka)l,故障点与末端距离为l2=(n-a-ka)l,ka∈[0,1];设初始故障行波到达线路始端的时刻为tb,初始故障行波到达线路末端的时刻为te。不考虑时间的误差,若利用波速度平均值v进行测距,得到的初步测距结果为
[0074][0075][0076]
一般而言,初步测量结果l
1(0)
与实际故障距离l1之间的误差不会超过每一分段的长度,同理,另一端测量结果l
2(0)
与l2间的误差同样满足前述关系,即
[0077]
|l
1(0)-l1|≤l
[0078]
|l
2(0)-l1|≤l
ꢀꢀ
(3)
[0079]
因此,根据上式可以确定故障发生在第几分段,假设通过初测已经明确故障发生在a号与a 1号点之间的一段上,下一步,对测距结果进行修正,令
[0080]
l
1*
=l
1(0)
ε
[0081]
l
2*
=l
2(0)-ε
ꢀꢀ
(4)
[0082]
上式中l
1*
和l
2*
代表修正后的测距结果,l
1(0)
和l
2(0)
为故障距离初测值,ε为修正量。
[0083]
根据已知每分段下的波速度和传播时间,可以构造如下修正式
[0084][0085][0086]
式中tb和te作为已知量,记录的是线路首端和末端测量点检测到故障行波的时刻;tc是未知量,表示故障发生时刻;t
b-tc表示初始故障行波从故障点处传播到首端测量点的时间,t
e-tc表示初始故障行波从故障点处传播到末端测量点的时间;为初始故障行波从a号点传递到首端0号点所需要的时间,为初始故障行波从a号点传递到末端n点所需要的时间;v
a 1
为初始故障行波在已确定的a号点至a 1号点分段之间的传播速度。时间关系满足
[0087][0088]
最后可以得出
[0089][0090][0091]
本发明还公开了在pscad仿真中模拟装置的测距过程,具体内容如下:
[0092]
在pscad中建立海-陆混合直流电缆输电线路的故障测距模型。在利用双端法进行故障测距时,只检测初始故障行波到达时刻,不考虑换流器控制的影响。因此输电线路两端可以直接用直流电源进行等效。线路全长108km,包括99km直流海缆线路以及9km直流陆缆线路。海上风电场一侧定义为输电线路始端,交流大电网一侧定义为输电线路末端。如图6所示为海上风电直流输电系统结构,在进行故障测距之前,首先需要对线路进行实验测试得到各线路以及线路各分段的波速度。具体方式是从电缆始端注入电压行波,注入时刻为0.01s。在末端测量点记录波形,采样率为1mhz。采用三次中心b样条函数的导函数作为小波函数,对原始信号进行小波变换,检测出尺度因子分别为24、23、22、21下后的信号。选择第三尺度进行分析,记录wi(23,t)中第一个模极大值出现的时刻,即为初始行波到达测量点的时刻,由此推算出海缆和陆缆线路的波速度。
[0093]
1)对海缆线路进行实验
[0094]
通过上述注入行波的方法得出海缆线路的平均波速度,记录末端测量到的波形以及小波变换后23尺度下的结果。
[0095]
由图8可知,其中8.1为原始波形,8.2为多尺度分析下的模极大值;模极大值出现时刻为0.010540s,海缆全长为99km,传播时间为540μs,计算所得海缆上的平均波速度为
[0096]
如图7所示为如东海上风电送出系统拓扑图,在如东海上风电实际工程中,电缆单位长度为9km,每段之间需要用海底电缆软接头技术进行连接,由于电缆接头的存在,势必会造成不同段上的波速度不一致。为了构造不同的波速度,在仿真中将电缆按照9km的单位长度进行分段,通过每段电缆参数的细微调整来模拟实际工程中的软接头。
[0097]
99km长的海底电缆共分为11段,行波在每段的传播时间以及波速度如表1(海缆不同段波速度)所示,表1
[0098][0099][0100]
2)对陆缆线路进行实验
[0101]
通过注入行波的方法得出陆缆线路的波速度,记录末端测量到的波形以及小波变换后23尺度下的结果。
[0102]
由图9可知,其中9.1为原始波形,9.2为多尺度分析下的模极大值;陆缆单位长度9km,单位长度传播时间为49.00μs,计算所得波速度为v2=1.836734694
×
108m/s。
[0103]
3)对线路全长进行实验
[0104]
通过注入行波的方法得出线路全长的平均波速度,记录末端测量到的波形以及小波变换后23尺度下的结果。
[0105]
由图10可知,其中10.1为原始波形,10.2为多尺度分析下的模极大值;线路全长为108km,其中海缆99km,陆缆9km,线路全长传播时间为589μs,计算所得平均波速度为
[0106]
将线路各段的波速度以及各段的传播时间记录下来,模拟装置的信息录入过程,为后续的故障测距调用作准备。
[0107]
在pscad中,设置故障发生时间为0.01s,并设置不同位置的单极接地故障,测量点采样频率为1mhz。采样信号为两端的直流电压信号。当测距启动信号发出后,取出时间窗长度为0.01s的数据,测距程序启动前后的数据各占0.005s。
[0108]
在matlab中对这部分采样数据进行处理进行极模变换,以及小波变换,得出模极大值出现的时刻集合,第一个模极大值出现的时刻即为初始故障行波传到测量点的时刻。对发生在不同位置的故障进行初始故障测距后再进行精确故障测距,得到表2所示的结果。
[0109]
表2
[0110][0111]
由表2息知,当故障发生在距离始端9km时,初始测距的误差小于精确测距的误差,可以认为是由于采样频率1mhz造成的,限于采样频率,对初始故障行波的识别只能精确到微秒级,因此会造成一定的偏差;另外,当故障发生在线路全长中点(距离始端54km)时,传统法的误差为0。除上述特殊说明的两组数据以外,其余所有测距数据均表明相较于初始测距,装置的精确测距算法更准确,本文的实验数据反映出,初始测距的平均测量误差为
30.749m,而精确测距法的平均测量误差为23.368m,并且,最小误差可以达到0.01m。
[0112]
仿真模拟了本发明装置提出的所有流程,证明了本发明装置能够有效提高电缆测距的精确度。
[0113]
对所公开的实施例的上述说明,按照递进的方式进行,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。