1.本发明涉及软体机器人技术领域,具体地,涉及一种基于气动柔性捏取式多工况抓手。
背景技术:
2.软体气动抓手是指由杨氏模量较小的软材料组成、在一定气压驱动下其结构产生指定的变形完成抓取操作的机器人抓手。软体气动抓手在与外界环境交互的过程中表现出很强的适应性,无需引入额外的力反馈控制器,可根据交互对象改变自身形状,不容易对交互对象产生破坏。因此,常常用于工业自动化领域,夹持易碎的物品,例如,珠宝,鸡蛋,粉饼。
3.面向狭小空间下的细小或者易碎品抓取场景,当前技术的机器人末端抓手不同时具备轻量化、结构紧凑、驱动简单、具有柔性交互等特点,产生了对环境和机器人造成因碰撞而损坏的危险。作为弥补手段,往往需要对机器人末端增加额外的控制成本。此外,当前的软体机器人设计往往无法平衡抓取输出力和变形行程等因素,因此,在实际应用中往往达不到理想的效果,存在待改进之处。
4.公开号为cn207027311u的专利文献公开了一种新型柔性夹头,包括由弹性材料制成的夹持部和连接部,所述夹持部包括至少两个相互配合用于夹持的指尖,各指尖之间形成了指缝,每个指尖的内部均设置有指腔,所述连接部包括连通腔室,该连通腔室与各指腔均连通,所述连接部上设置有与连通腔室相通的连通口,所述指尖包括靠近指缝的内壁和远离指缝的外壁,所述内壁的厚度小于外壁的厚度或者内壁的弹性模量小于外壁的弹性模量。但是该专利文献本身薄壁结构设计决定了其在不更改材料模量与驱动气压时,输出力的上限较低。
5.公开号为cn109015724a的专利文献公开了一种气动软体抓手,包括气动软体驱动器、夹持装置;气动软体驱动器是有气腔的空心柱状结构,横截面为半圆形,三个气动软体驱动器按圆周均布组成抓手,每个气动软体驱动器的一端固定在辅助设计的夹持装置上,气压作用下自由端会产生朝向圆心方向的弯曲动作,三个协调配合实现抓取任务。但是该专利文献存在抓取空间有限,抓取物品的种类有限的缺陷。
6.公开号为cn111360866b的专利文献公开了一种工作空间自动可调的气动软体抓手,包括、掌部张合机构、顶部连接件和多个气动软体单指;所述掌部张合机构位于所述多个气动软体单指上方,所述顶部连接件位于所述掌部张合机构上方,所述顶部连接件与所述掌部张合机构紧固连接;所述气动软体单指包括多腔体式驱动器、软体应变传感器和连接底座,所述软体应变传感器与所述多腔体式驱动器紧固连接,所述多腔体式驱动器紧固连接在所述连接底座上。但是该专利文献存在无法平衡抓取输出力和变形行程等因素的缺陷。
技术实现要素:
7.针对现有技术中的缺陷,本发明的目的是提供一种基于气动柔性捏取式多工况抓手。
8.根据本发明提供的一种基于气动柔性捏取式多工况抓手,包括:刚性承压盖、刚性密封环、柔性气腔以及多个柔性多材料手指;
9.所述刚性密封环和所述柔性气腔设置于所述刚性承压盖内,所述柔性气腔通过所述刚性密封环密封设置在所述刚性承压盖上;所述刚性承压盖上设置有气源输入孔,所述气源输入孔与所述柔性气腔连通设置;
10.所述柔性多材料手指的一端连接设置在所述柔性气腔上,所述柔性多材料手指远离所述柔性气腔的一端设置为抓取端。
11.优选的,所述柔性气腔上设置有用于连接所述柔性多材料手指的底部回转面;
12.所述柔性多材料手指上设置有与所述底部回转面相适配的回转曲面;所述柔性多材料手指通过所述回转曲面和所述底部回转面连接设置所述柔性气腔上。
13.优选的,所述底部回转面为中间内凹边缘凸起的曲面。
14.优选的,所述刚性承压盖和所述柔性气腔整体呈圆柱形设置;
15.所述柔性多材料手指整体呈楔形设置;所述柔性多材料手指设置为三个,三个所述柔性多材料手指呈环向阵列设置在所述柔性气腔上。
16.优选的,所述底部回转面和所述回转曲面粘合设置。
17.优选的,所述刚性承压盖上设置有第一连接孔;
18.所述柔性多材料手指靠近所述柔性气腔一端的周侧壁通过所述第一连接孔连接设置在所述刚性承压盖。
19.优选的,所述气源输入孔同时作为第二连接孔,外部移动设备通过所述第二连接孔与所述刚性承压盖连接;
20.所述刚性承压盖上设置有第三连接孔,所述刚性密封环通过所述第三连接孔将所述柔性气腔夹紧设置在所述刚性承压盖上。
21.优选的,所述柔性多材料手指包括软体结构和增强结构;
22.所述软体结构采用agilus30 clear材料制作,所述增强结构采用veroblackplus材料与agilus30 clear材料混合制作。
23.优选的,所述刚性承压盖和所述刚性密封环采用树脂材料制作;
24.所述柔性气腔采用聚氨酯橡胶浇铸制作,剪切模量为0.5mpa;
25.所述柔性多材料手指采用多材料聚合物喷射3d打印工艺一体成型制作,其内部包含多种模量的材料组合,材料剪切模量涵盖0.2mpa到15mpa的范围。
26.优选的,当所述柔性气腔通入正压时,所述柔性气腔的膨胀使多个所述柔性多材料手指张开;
27.当所述柔性气腔通入负压时,所述柔性气腔的收缩使多个所述柔性多材料手指收拢。
28.与现有技术相比,本发明具有如下的有益效果:
29.1、本发明涉及的基于气动柔性捏取式多工况抓手在无驱动气压时处于收拢状态,该构型有利于进入狭窄空间;三个柔性手指同时由根部的单个气腔驱动,驱动简单;该抓手
通过正压或者负压的驱动,具有两种工作状态,以适应不同外形特征的物体;例如通过正压驱动,内撑带有孔洞的物体如西林瓶,轴承,螺母;通过负压驱动,从外夹取物体;
30.2、本发明结合了拓扑优化设计方法以及采用了多材料聚合物喷射的增材制造工艺,该抓手在正压或者负压驱动下,都能够输出较大的抓取力;在160kpa下,单根手指阻塞力能够达到1.6n,在-80kpa下,能够达到-0.9n;
31.3、本发明的抓手外形紧凑,轻便,适合作为机器人的末端执行器使用,该抓手尺寸为40*40*73mm,总重89g。
附图说明
32.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
33.图1是本发明的基于气动柔性捏取式多工况抓手的结构图;
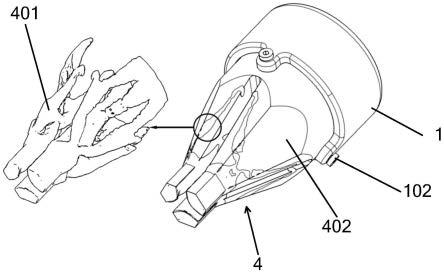
34.图2是本发明的柔性多材料手指的结构图;
35.图3是本发明的基于气动柔性捏取式多工况抓手的装配剖视图;
36.图4是本发明的基于气动柔性捏取式多工况抓手的装配爆炸图。
37.图中示出:
38.刚性承压盖1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柔性气腔3
39.气密用螺栓101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
底部回转面301
40.固定用螺栓102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
柔性多材料手指4
41.气源输入孔103
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
增强结构401
42.第一连接孔104
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
软体结构402
43.刚性密封环2
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
回转曲面403
具体实施方式
44.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
45.实施例1:
46.如图1~4所示,本实施例提供一种基于气动柔性捏取式多工况抓手,包括:刚性承压盖1、刚性密封环2、柔性气腔3以及多个柔性多材料手指4,刚性密封环2和柔性气腔3设置于刚性承压盖1内,柔性气腔3通过刚性密封环2密封设置在刚性承压盖1上,刚性承压盖1上设置有气源输入孔103,气源输入孔103与柔性气腔3连通设置,柔性多材料手指4的一端连接设置在柔性气腔3上,柔性多材料手指4远离柔性气腔3的一端设置为抓取端。
47.当柔性气腔3通入正压时,柔性气腔3的膨胀使多个柔性多材料手指4张开;当柔性气腔3通入负压时,柔性气腔3的收缩使多个柔性多材料手指4收拢。
48.刚性承压盖1上设置有第一连接孔104,柔性多材料手指4靠近柔性气腔3一端的周侧壁通过第一连接孔104连接设置在刚性承压盖1。
49.气源输入孔103同时作为第二连接孔,外部移动设备通过第二连接孔与刚性承压
盖1连接,刚性承压盖1上设置有第三连接孔,刚性密封环2通过第三连接孔将柔性气腔3夹紧设置在刚性承压盖1上。
50.柔性气腔3上设置有用于连接柔性多材料手指4的底部回转面301,柔性多材料手指4上设置有与底部回转面301相适配的回转曲面403,柔性多材料手指4通过回转曲面403和底部回转面301连接设置柔性气腔3上。
51.刚性承压盖1和柔性气腔3整体呈圆柱形设置,柔性多材料手指4整体呈楔形设置;柔性多材料手指4设置为三个,三个柔性多材料手指4呈环向阵列设置在柔性气腔3上。底部回转面301和回转曲面403粘合设置。底部回转面301为中间内凹边缘凸起的曲面。
52.柔性多材料手指4包括软体结构402和增强结构401,软体结构402采用agilus30clear材料制作,增强结构401采用veroblackplus材料与agilus30 clear材料混合制作,veroblackplus材料与agilus30 clear材料按一定比列混合。
53.刚性承压盖1和刚性密封环2采用树脂材料制作,柔性气腔3采用聚氨酯橡胶浇铸制作,剪切模量为0.5mpa,柔性多材料手指4采用多材料聚合物喷射3d打印工艺一体成型制作,其内部包含多种模量的材料组合,材料剪切模量涵盖0.2mpa到15mpa的范围。
54.工作原理:
55.当气源通过气源输入孔103进入柔性气腔3内部时,由于底部回转面301为中间内凹边缘凸起的曲面,如果通入压力为正压时,底部回转面301中央会向抓手的抓取端方向鼓起,该底部回转面301在变形时会带动与之粘合的柔性多材料手指4的回转曲面403,柔性多材料手指4边缘受到刚性承压盖1的第一连接孔104固定,柔性多材料手指4在此边界条件约束和力的加载下,会使得末端手指产生一个打开的动作,相反的,如果通入压力为负压时,以上的变形方向相反,会使得末端手指产生一个收拢的动作。
56.实施例2:
57.本领域技术人员可以将本实施例理解为实施例1的更为具体的说明。
58.如图1~4所示,本实施例提供一种基于气动柔性捏取式多工况抓手,包括刚性承压盖1、刚性密封环2、柔性气腔3、柔性多材料手指4以及螺栓紧固件等结构。
59.刚性承压盖1,其整体为圆柱形,其顶部有一个螺纹孔,用以与外部(例如机械臂)相连接,同时作为气源输入孔103,该孔周围布置一圈通孔,用以与刚性密封环2连接,通过气密用螺栓101进行固定,刚性承压盖1底部有周向120度布置的螺栓孔用以固定柔性多材料手指4,通过固定用螺栓102进行固定。
60.刚性密封环2,其整体为圆环状,其周向间隔45度布置有八个螺纹孔,用以与刚性承压盖1相连。该密封环在装配后,夹紧柔性气腔3,使柔性气腔3与刚性承压盖1形成完整气密结构。
61.柔性气腔3,其整体为圆柱形,嵌入刚性承压盖1,其底面为中间内凹边缘凸起的曲面,为底部回转面301,该面与柔性多材料手指4顶部配合面(即回转曲面403)相互粘接。该部件同时被三个位于刚性承压盖1底周向120度布置的螺栓固定。
62.柔性多材料手指4,由三个外观相同的单个柔性手指环向阵列而成,呈现出收拢状,柔性手指整体呈楔形,具有较长长细比。其顶部存在一个回转曲面403,该回转曲面与柔性气腔3底面曲面相粘合。多材料手指大部分由agilus30 clear材料构成,存在少部分增强结构由veroblackplus材料与agilus30 clear材料按一定比例混合构成。增强结构整体从
顶部曲面向手指末梢延伸,呈现对称性,但具有复杂拓扑连接关系。
63.柔性多材料手指4内部材料分布由结构拓扑扑优化技术设计,以最大工作行程为设计目标,同时考虑抓取时物品对抓手的交互力。
64.刚性承压盖1以及刚性密封环2由强度较高的树脂材料制作,柔性气腔3由聚氨酯橡胶浇铸,剪切模量在0.5mpa附近,柔性多材料手指4由多材料聚合物喷射3d打印工艺一体成型制作。其内部包含多种模量的材料组合,材料剪切模量涵盖了0.2mpa到15mpa的范围。
65.气动柔性捏取式抓手具有两种工作状态,当柔性气腔3通入正压时,气腔的膨胀会使柔性多材料手指4张开;当通入负压时,气腔收缩使手指收拢。
66.本实施例公开了一种基于气动柔性捏取式多工况抓手,包括刚性承压盖1、刚性密封环2、柔性气腔3以及柔性多材料手指4,抓手本体具有3个环向周期阵列的指尖结构特征,柔性多材料手指配合面与柔性气腔底部回转配合面相互胶接。柔性多材料手指与柔性气腔通过刚性承压盖,刚性密封环组装,气动载荷通过承压盖接口与的柔性气腔连通。柔性多材料手指,通过结构拓扑优化方法设计。设计变量为内部软硬材料的拓扑分布,使得在传递柔性气腔的气压载荷时,能够在抓手末端产生最佳的展开与收拢的功能效果和抓取性能。该多材料柔性捏取式多工况抓手结构紧凑,质量轻便,驱动方便,适合在狭小空间内完成易碎或精密物件的抓取。
67.实施例3:
68.本领域技术人员可以将本实施例理解为实施例1的更为具体的说明。
69.本实施例提供了一种基于气动柔性捏取式多工况抓手,该捏取式抓手采用了了结构拓扑优化设计方法以及先进多材料增材制造工艺,大大简化了结构外形以及驱动布置,本实施例采用如下技术方案:
70.捏取式抓手包括刚性承压盖1,刚性密封环2,柔性气腔3,柔性多材料手指4以及螺栓紧固件等结构。刚性密封环2与柔性气腔3内嵌于刚性承压盖1中构成单连通气密腔室,在加压或者抽真空过程中,仅柔性气腔3底部回转面产生变形。柔性多材料手指4为内部无空腔的实心结构,其多材料分布由结构拓扑优化设计方法得到,与柔性气腔3回转面贴合,于刚性承压盖1底部的螺栓孔位固定。该柔性手指采用了聚合物喷射3d打印工艺,可以按需定义结构内部的材料软硬分布,在设计过程中,以最大化手指在气压驱动下的开合行程为目标,同时考虑了抓取时来自物体的交互力,设计软硬材料在结构内部的分布。在优选例中,采用了neo-hookean超弹性材料模型分析其在气压下的变形响应,采用了伴随位移法求解其目标的灵敏度。对于优化结果,本实施例采用了体素混合的方式,近似多材料的物理属性,完成后处理流程。
71.对于本实施例的使用条件,可作如下说明:其驱动形式为气动驱动,当通入正压时气腔膨胀顶开抓手根部,三个手指同步张开,极限耐压为180kpa;当通入负压时,气腔收缩牵引抓手根部,三个手指同步收拢,极限耐压为-100kpa。
72.进一步的,刚性承压盖1以及刚性密封环2由强度较高的树脂材料制作
73.进一步的,柔性气腔3由聚氨酯橡胶浇铸,剪切模量在0.5mpa附近
74.进一步的,柔性多材料手指4由多材料聚合物喷射3d打印工艺一体成型制作。其内部材料组合的剪切模量涵盖了0.2mpa到15mpa的范围。
75.本发明的柔性捏取式多工况抓手结构紧凑,质量轻便,驱动方便,适合在狭小空间
内完成易碎或精密物件的抓取。
76.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
77.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。