1.本发明的实施例涉及一种定位及抓取夹具,特别涉及一种应用于新能源氢燃料电池单电池的生产过程中,燃料电池单电池的双极板的抓取与校正的工装夹具。
背景技术:
2.燃料电池单电池由双极板双极板胶膜和mea组成,他们之间通过加热及压紧力被封装到一起。单电池由于双极板本身尺寸和外形变形的影响,目前关于双极板的抓取,还没有一种有效的工装,目前都是采用人工放置在热敷工装上,这样由于双极板本身的变形与人工放置的精度不高,直接影响单极板膜热敷效果,也影响单电池热封装效果。
技术实现要素:
3.本发明的实施方式的目的在于提供一种能够解决现有的双极板的抓取和放置过程中精度不高并且直接影响单极板膜热敷效果,也影响单电池热封装效果的双极板定位及抓取夹具。
4.为了实现上述目的,本发明的实施方式设计了一种双极板定位及抓取夹具,其特征在于,包括:
5.夹具座板;
6.弹性支撑结构,在所述的夹具座板上活动连接所述的弹性支撑结构的一端;
7.整平板,在所述的弹性支撑结构的另一端固定连接所述的整平板;
8.吸盘结构,在所述的整平板上设置若干个吸盘结构;
9.吸附升降结构,在所述的吸盘结构上方设置所述的吸附升降结构;所述的吸附升降结构驱动所述的吸盘结构;通过所述的整平板的作用下对双极板进行吸附;所述的弹性支撑结构在吸附完成后,对所述的整平板进行复位。
10.进一步,在所述的夹具座板的上方固定连接座,在所述的夹具座板上,在所述的连接座的两侧固定所述的分气块,在所述的分气块上固定若干个手动调速阀。
11.进一步,在所述的双极板的下方设置所述的平台。
12.进一步,所述的弹性支撑结构沿着所述的夹具座板的中心轴线对称设置。
13.进一步,所述的弹性支撑结构,还包括:
14.第一整平导向轴承,在所述的夹具座板上固定若干个所述的第一整平导向轴承;
15.第一整平导杆,在所述的第一整平导向轴承内活动连接所述的第一整平导杆;所述的第一整平导杆的一端穿过开设在吸盘固定板上的通孔后,与整平板固定连接;
16.第一浮动量调整螺母,在其中所述的夹具座板的两侧的若干根所述第一整平导杆的一端上通过螺纹连接所述的浮动量调整螺母;
17.弹簧,在所述的夹具座板与所述整平板之间,在所述的夹具座板的两侧的若干根所述整平导杆上套入所述的弹簧。
18.进一步,所述的吸盘结构,还包括:
19.海绵吸盘调整板,在吸盘固定板的两侧,在所述的吸盘固定板上固定所述的海绵吸盘调整板的一端;
20.海绵吸盘,在所述的海绵吸盘调整板的另一端上固定所述的海绵吸盘;所述的海绵吸盘的一端穿过设置在所述整平板上的圆孔中;所述的海绵吸盘的一端与所述的双极板贴合;
21.伯努利吸盘,在所述的吸盘固定板上固定若干个所述的伯努利吸盘;所述的伯努利吸盘穿过设置在所述整平板上的圆孔中,所述的伯努利吸盘的一端与所述的双极板贴合;
22.所述的海绵吸盘设置在所述的双极板的两端;所述的伯努利吸盘沿着所述的双极板的边框设置。
23.进一步,在所述的伯努利吸盘之间,在所述的整平板上开设沟槽,通过所述的沟槽将所述的伯努利吸盘之间连接。
24.进一步,所述的吸附升降结构,还包括:
25.吸附升降气缸,在所述的夹具座板的下方固定所述的吸附升降气缸的缸体;所述的吸附升降气缸的活塞杆上连接所述的整平板;
26.第二整平导向轴承,在所述的夹具座板上,在所述的吸附升降气缸的两侧;在第一整平导向轴承的同一直线上,固定若干个所述的第二整平导向轴承;
27.第二整平导杆,在所述的第二整平导向轴承内活动连接所述的第二整平导杆;所述的第二整平导杆的一端固定吸盘固定板上。
28.进一步,所述的连接座连接取件装置连接;所述的手动调速阀通过气管与海绵吸盘、伯努利吸盘相连接;所述的分气块的一端与抽真空系统相连接。
29.进一步,在所述的平台上沿所述的双极板的边框开设凹槽定位孔,用于所述的双极板的定位。
30.本发明的实施方式同现有技术相比,采用了在夹具座板上活动连接弹性支撑结构的一端;在弹性支撑结构的另一端固定连接整平板;在整平板上设置若干个吸盘结构;在吸盘结构上方设置吸附升降结构;吸附升降结构驱动吸盘结构;通过整平板的作用下对双极板进行吸附;弹性支撑结构在吸附完成后,对整平板进行复位。通过上述的结构,解决了现有的双极板的抓取和放置过程中精度不高并且直接影响单极板膜热敷效果,也影响单电池热封装效果的技术问题。
附图说明
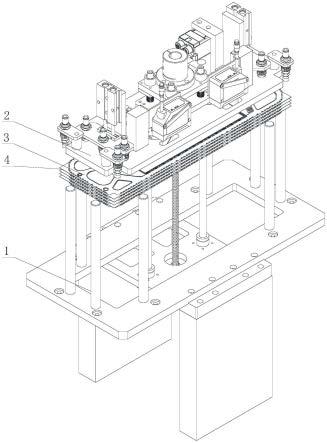
31.图1为本发明的立体结构示意图;
32.图2为图1的主视方向的结构示意图;
33.图3为图1的俯视方向的结构示意图;
34.图4为图1的俯视方向的整平板的结构示意图。
具体实施方式
35.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本发明各实施方式中,
为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
36.本发明的实施方式涉及一种双极板定位及抓取夹具,如图1、图2、图3、图4所示,包括:
37.在本实施例中的夹具座板2作为安装的框架;
38.在夹具座板2上活动连接弹性支撑结构100的一端;弹性支撑结构100使得整平板12,在拾取双极板时,使得整平板12具有弹性,同时,使得整平板12在放置双极板10后,具有回弹的作用。在弹性支撑结构100的另一端固定连接整平板12;整平板12的作用是在拾取和放置双极板10时,起到压平双极板10和保持双极板10的作用。
39.在整平板12上设置若干个吸盘结构200;吸盘结构200主要用于在在拾取和放置双极板10过程中,吸住双极板10,并保持双极板10本身在搬运的过程中不变形。
40.吸附升降结构300,在吸盘结构200上方设置吸附升降结构300;吸附升降结构300驱动吸盘结构200;通过整平板12的作用下对双极板10进行吸附;弹性支撑结构200在吸附完成后,对整平板12进行复位。通过上述的结构,解决了现有的双极板的抓取和放置过程中精度不高并且直接影响单极板膜热敷效果,也影响单电池热封装效果的技术问题。
41.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,在夹具座板2的上方固定连接座1,在夹具座板2上,在连接座1的两侧固定分气块17,在分气块17上固定若干个手动调速阀18。分气块17主要用于将真空,分配给吸盘结构200,手动调速阀18用于调节每一个的吸盘的真空压力。
42.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,在双极板10的下方设置平台11。平台11主要用于对双极板10进行定位。使得双极板10在拾取前,能够保持平整,不变形。
43.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,弹性支撑结构100沿着夹具座板2的中心轴线对称设置。这样主要是为了使在拾取双极板10的过程中,保持平衡,这样就能够保证双极板10的平整。
44.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,弹性支撑结构100,还包括:
45.在夹具座板2上固定若干个第一整平导向轴承15;第一整平导向轴承15用于滑动第一整平导杆14;
46.在第一整平导向轴承15内活动连接第一整平导杆14;第一整平导杆14的一端穿过开设在吸盘固定板6上的通孔61后,与整平板12固定连接;第一整平导杆14用于连接整平板12;
47.在其中夹具座板2的两侧的若干根第一整平导杆14的一端上通过螺纹连接浮动量调整螺母第一浮动量调整螺母16;第一浮动量调整螺母16用于防止从夹具座板2上脱出;
48.在夹具座板2与整平板12之间,在夹具座板2的两侧的若干根整平导杆14上套入弹簧13。弹簧13使得整平板12实现回弹。
49.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,吸盘结构200,还包括:
50.在吸盘固定板6的两侧,在吸盘固定板6上固定海绵吸盘调整板8的一端;海绵吸盘调整板8用于安装海绵吸盘9;
51.在海绵吸盘调整板8的另一端上固定海绵吸盘9;海绵吸盘9的一端穿过设置在整平板12上的圆孔121中;海绵吸盘9的一端与双极板10贴合;海绵吸盘9用于吸取双极板10的两端;
52.在吸盘固定板6上固定若干个伯努利吸盘7;伯努利吸盘7穿过设置在整平板12上的圆孔121中,伯努利吸盘7的一端与双极板10贴合;伯努利吸盘7用于吸取双极板10上镂空后,较细的边框。
53.海绵吸盘9设置在双极板10的两端;伯努利吸盘7沿着双极板10的边框设置。
54.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,在伯努利吸盘7之间,在整平板12上开设沟槽122,通过沟槽122将伯努利吸盘7之间连接,这样使得在吸取双极板10的过程中沟槽122,起到均衡真空度的作用,使得伯努利吸盘7吸取的真空度尽可能保持一致,使得双极板10更能够保持平整,不变形。能够使得更好解决了现有的双极板10的抓取和放置过程中精度不高并且直接影响单极板膜热敷效果,也影响单电池热封装效果的技术问题。
55.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,吸附升降结构300,还包括:
56.在夹具座板2的下方固定吸附升降气缸3的缸体;吸附升降气缸3的活塞杆上连接整平板12;吸附升降气缸3用于控制整平板12的上下移动.
57.在夹具座板2上,在吸附升降气缸3的两侧;在第一整平导向轴承15的同一直线上,固定若干个第二整平导向轴承151;第二整平导向轴承151用于活动连接第二整平导杆141。
58.在第二整平导向轴承151内活动连接第二整平导杆141;所述的第二整平导杆141的一端固定吸盘固定板6上。第二整平导杆141用于对吸盘固定板6进行导向,起到精确导向的作用。
59.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,连接座1连接取件装置连接;取件装置一般如机器人或者模组;手动调速阀18通过气管与海绵吸盘9、伯努利吸盘7相连接;分气块17的一端与抽真空系统相连接。手动调速阀18用于调节每一个海绵吸盘9和伯努利吸盘7的压力。
60.为了实现上述的技术效果,本实施例中的双极板定位及抓取夹具,如图1、图2、图3、图4所示,在平台11上沿所双极板10的边框开设凹槽定位孔111,用于双极板10的定位。在平台11上沿所双极板10的边框开设凹槽定位孔111能够保证双极板10在吸取前保证平整和不变形。
61.在本实施例中的双极板定位及抓取夹具动作流程详细说明如下:
62.将本实施例中的双极板定位及抓取夹具通过连接座1与机器人或者模组连接,双极板10放置在平台11上;
63.双极板10的整平:机器人或者模组带动本实施例中的双极板定位及抓取夹具向下移动,整平板12压紧双极板10,完成双极板10整平。整平板12平面度,可以通过设备加工来保证,整平板12上带有带有浮动弹簧13,可以保证双极板10不会损坏。
64.当整平板12压紧双极板10完成平面度临时修复后,吸附升降气缸3伸出伯努利吸
盘7完成对双极板10非接触式吸附。
65.吸附双极板10放置指定位置,吸附升降气缸13复位。
66.本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。