1.本发明涉及装配辅助装置技术领域,尤其是一种长臂吸提式辅助装配设备。
背景技术:
2.细长圆筒形产品是指长度超过2.5m、直径小于800mm回转体外壳结构产品,传统的装配方法为操作工搬运零部件进入外壳内进行安装,该产品装配时存在以下几个问题:产品为多品种、小批量的特征,定制专用自动化设备成本较高;部分零部件较重,重量大于50kg,人员将零部件搬运至筒状外壳内进行固定时比较困难且容易磕碰零部件设备;不同产品所涉及的专用工装多,工艺装备柔性差,不能满足不同形状外壳装配需求;部分产品直径特别狭小,操作工无法进入导致产品无法实施装配。
技术实现要素:
3.针对上述技术问题,本发明提出了一种长臂吸提式辅助装配设备,该长臂吸提式辅助装配设备能够实现了圆筒外壳定角度旋转、零部件吸提和平移、零部件安装及姿态调整的功能,装配更加安全,操作更加便捷。
4.一种长臂吸提式辅助装配设备,包括底座、线性导轨、可移动工作台、气动组件、真空吸盘组、壳体前支撑、壳体辅助支撑、壳体后支撑,所述底座为长条形,所述线性导轨平行固定于底座上,所述可移动工作台与线性导轨滑动连接,所述气动组件安装于可移动工作台的末端,用于驱动真空吸盘组,所述壳体前支撑、壳体辅助支撑、壳体后支撑从左往右固定于底座上,用于支撑圆筒形产品。
5.作为上述技术方案的优选,所述壳体前支撑和壳体后支撑结构相同,包括底板、立板、滚轮轴、滚轮一、定位螺钉及连杆,所述立板平行垂直固定于底板上,通过连杆固定连接,所述滚轮一通过滚轮轴对称安装于立板顶部左右两侧,所述定位螺钉螺纹连接于立板的中部。
6.作为上述技术方案的优选,所述壳体辅助支撑包括框架体、斜支撑架、滚轮二及调节螺钉,所述斜支撑架通过调节螺钉对称安装于框架体顶部左右两侧,所述滚轮二与斜支撑架转动连接。
7.作为上述技术方案的优选,所述可移动工作台包括工作台框架、悬臂梁,所述工作台框架与线性导轨滑动连接,所述悬臂梁平行于线性导轨固定于工作台框架上,所述气动组件安装于悬臂梁端部。
8.作为上述技术方案的优选,所述底座由横梁和纵梁焊接而成,所述线性导轨固定于纵梁上。
9.作为上述技术方案的优选,所述立板上设有与定位螺钉配合实用的腰型孔,所述腰型孔垂直于底板设置。
10.本发明的有益效果在于:
11.1、采用高压气体作为动力源,在各类气体管路中增加有过滤装置,能适用于防爆
厂房内的装配场合。
12.2、通过吸盘吸提动作和工作台滑移替代了人工将零件搬运至壳体内,减轻了操作工的劳动强度,提高了工作效率。
13.3、内窥镜能准确观察零件装入壳体后的位置,解决了人工无法进去壳体观察零件位置的问题,实现零件精确定位,进一步提高了工作效率。
附图说明
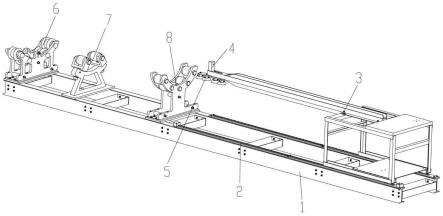
14.图1为本发明的结构示意图。
15.图2为壳体前支撑和壳体后支撑结构的结构示意图。
16.图3为壳体辅助支撑的结构示意图。
17.图4为可移动工作台的结构示意图。
18.图5为气动组件的原理图。
19.附图标记如下:1-底座、2-线性导轨、3-可移动工作台、4-气动组件、5-真空吸盘组、6-壳体前支撑、7-壳体辅助支撑、8-壳体后支撑、9-底板、10-立板、11-滚轮轴、12-滚轮一、13-定位螺钉、14-连杆、15-框架体、16-斜支撑架、17-滚轮二、18-调节螺钉、19-工作台框架、20-悬臂梁、21-腰型孔、22-真空发生器、23-手动滑阀、24-真空吸盘接口、25-过滤减压阀、26-手动换向阀、27-气缸、28-三通接头。
具体实施方式
20.下面结合本发明的附图,对本发明的技术方案进行清楚、完整的描述。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.如图1至图4所示的一种长臂吸提式辅助装配设备,包括底座1、线性导轨2、可移动工作台3、气动组件4、真空吸盘组5、壳体前支撑6、壳体辅助支撑7、壳体后支撑8,所述底座1为长条形,所述线性导轨2平行固定于底座1上,所述可移动工作台3与线性导轨2滑动连接,所述气动组件4安装于可移动工作台3的末端,用于驱动真空吸盘组5,所述壳体前支撑6、壳体辅助支撑7、壳体后支撑8从左往右固定于底座9上,用于支撑圆筒形产品。
22.在本实施例中,所述壳体前支撑6和壳体后支撑8结构相同,包括底板9、立板10、滚轮轴11、滚轮一12、定位螺钉13及连杆14,所述立板10平行垂直固定于底板9上,通过连杆14固定连接,所述滚轮一12通过滚轮轴11对称安装于立板10顶部左右两侧,所述定位螺钉13螺纹连接于立板10的中部。
23.在本实施例中,所述壳体辅助支撑7包括框架体15、斜支撑架16、滚轮二17及调节螺钉18,所述斜支撑架16通过调节螺钉18对称安装于框架体15顶部左右两侧,所述滚轮二17与斜支撑架16转动连接。
24.在本实施例中,所述可移动工作台3包括工作台框架19、悬臂梁20,所述工作台框架19与线性导轨2滑动连接,所述悬臂梁20平行于线性导轨2固定于工作台框架19上,所述气动组件4安装于悬臂梁20端部。
25.在本实施例中,所述底座1由横梁和纵梁焊接而成,所述线性导轨2固定于纵梁上。
26.在本实施例中,所述立板10上设有与定位螺钉13配合实用的腰型孔21,所述腰型
孔21垂直于底板9设置。
27.其中,气动组件4为现有技术,如图5所述,包括真空发生器22、手动滑阀23、真空吸盘接口24、过滤减压阀25、手动换向阀26、气缸27、三通接头28,通过高压气体对真空发生器22产生真空,从而实现真空吸盘组5对工件的吸提操作,通过手动滑阀23实现对真空吸盘组22的吸提控制,通过气缸27实现真空吸盘组5的上下运动,手动换向阀26对真空吸盘组5的运动方向进行控制。
28.本长臂吸提辅助装配设备的使用步骤如下:
29.①
将圆形外壳吊装于壳体前支撑6、壳体后支撑8上,根据壳体强度按需要采用壳体辅助支撑7进行支撑,完成圆形外壳的安装;
30.②
开启高压气源,启动气动组件4,将待装配的零件放置在真空吸盘组5下方;
31.③
控制手动换向阀26和手动滑阀23使真空吸盘组5向下运动,将零件吸住;
32.④
控制手动换向阀26使真空吸盘组5向上运动将零件提起;
33.⑤
推动可移动工作台3,使其在线性导轨2上滑动,将零件装入壳体内部后通过内窥镜装置(内窥镜装置为现有技术,安装于悬臂梁20上靠近真空吸盘组5的位置,在附图中未显示)观察零件位置,通过调整可移动工作台3位置和旋转壳体位置,使得零件对准待装配区域;
34.⑥
控制手动换向阀26时真空吸盘组5组往下运动将零件放置到位;
35.⑦
控制手动滑阀23,释放零件与真空吸盘组5之间的真空,将零件释放。
36.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。