1.本发明涉及康复设备技术领域,特别涉及一种基于人体结构与运动仿生的智能足踝假肢。
背景技术:
2.人口的持续增长、自然灾害、交通事故等引起的截肢者比例不断增加,佩戴合适的假肢是辅助截肢者回归社会和日常生活的有效措施,假肢的研究与开发具有巨大的市场、社会需求。面向胫骨截肢患者,佩戴足踝假肢是帮助其实现正常的日常行走、活动功能的可靠方式。
3.随着下肢假肢领域的不断发展,与传统的被动、无动力型足踝假肢相比,主动智能型踝假肢具有稳定性好、功能多样化等特点,可以依据截肢者的情况进行个性化的方案设计,智能足踝假肢的相关研究越来越受到国内外学者广泛的关注。
4.目前,被动无动力型足踝假肢缺乏驱动单元,需要借助于患者残肢的力量进行运动,难以实现自然有序的步态,使用者易疲劳,难以弥补截肢患者丧失的运动功能,无法适应日常多变、复杂的地形(au,s.,m.berniker and h.herr,powered ankle-foot prosthesis to assist level-ground and stair-descent gaits.neural networks the official journal of the international neural network society,2008.21(4):p.654-666.)。随着经济和生活水平的不断提高,人们的需求不再局限于笨重的被动型假肢,越来越多的学者投入到智能型假肢的研究中。
技术实现要素:
5.为克服上述现有技术的缺点,本发明的目的在于提供一种基于人体结构与运动仿生的智能足踝假肢,具有结构简单紧凑、人体运动吻合特性好、运动效果优良、节能等特点,可以进行大面积推广应用。
6.为实现上述目标,本发明采用的技术方案是:
7.一种基于人体结构与运动仿生的智能足踝假肢,包括脚跟仿形结构1,脚跟仿形结构1上连接有距骨仿形结构2,距骨仿形结构2与脚掌仿形结构4连接,脚跟仿形结构1与脚掌仿形结构4末端安装压缩弹簧3;距骨仿形结构2与跟腱仿形结构5一端相连,跟腱仿形结构5另一端与滚珠丝杠滑块7相连,滚珠丝杠滑块7上固定有滚珠丝杠螺母8,滚珠丝杠9两端通过丝杠底座6、丝杠顶部固定块10固定在胫骨仿形结构13上,丝杠底座6与丝杠顶部固定块10之间安装有滚珠丝杠支撑杆11,滚珠丝杠滑块7通过滚珠丝杠支撑杆11进行导向,胫骨仿形结构13顶端固定有假肢接受腔连接块19;
8.所述的滚珠丝杠9由电机12驱动,电机12通过电机固定架14固定在胫骨仿形结构13上,胫骨仿形结构13与距骨仿形结构2构成滚动关节,由四个固定弹簧16连接。
9.由距骨仿形结构2的凸台设计与胫骨仿形结构13对应的凹面设计进行横向限位,保证胫骨仿形结构13与距骨仿形结构2构成滚动关节的滚动面不会产生横向滑动。
10.所述的脚跟仿形结构1与脚掌仿形结构4通过压缩形变配合压缩弹簧3进行正常步态行走时的储能、放能,利用脚跟仿形结构1与脚掌仿形结构4模拟人体足弓与踝关节周围的肌腱存储与释放能量。
11.所述的电机12输出轴上连接有小带轮17,小带轮17通过同步带20和大带轮18连接,大带轮18和滚珠丝杠9的输入端连接。
12.所述的胫骨仿形结构13与距骨仿形结构2的滚动面通过对人体踝关节进行仿生研究分析,建立人体踝关节面三维模型,提取关节关键接触点进行多项式拟合,得到其关节轨迹曲线,固定弹簧16保证滚动面始终接触,同时在设计过程中通过定义滚动面的形状来实现距骨仿形结构2的特定运动轨迹的输出。
13.所述的电机12通过编码器15捕获电机的转速及加速度信息,进而调节电机转速,保证踝关节转动幅度、速度与步行速度的匹配,电机12按照人脚尖行程的大小选择行程,根据踝关节的背屈与跖屈状态调节电机12的正反转。
14.所述的胫骨仿形结构13上设有与假肢接受腔连接的假肢接受腔固定块19,根据不同使用要求替换假肢接受腔固定块19型号,从而实现患者患肢高度的微调;脚掌仿形结构4端部落实连接处开有u型孔,能够进行脚掌仿形结构前后调节,实现患者整个足部大小的适度调整。
15.所述的脚跟仿形结构1与脚掌仿形结构4依据人体足弓高度以及曲面特征进行个性化设计,实现接近人体足部的弹性形变。
16.所述的电机12采用肌电信号控制的模式,通过肌电信号解析患者运动意图,判断患者所处的活动场地工况,在活动地点采用肌电信号和测距雷达控制进行不同工况下的控制模式切换。
17.本发明的有益效果是:
18.本发明通过对人体踝关节进行仿生研究分析,得到其关节轨迹曲线,并以该轨迹曲线进行滚动面设计,进而设计足踝假肢机构,得到一种结构简单紧凑、人体运动协调特性好、运动效果优良、节能的仿生智能足踝假肢。
19.采用电机作为动力源,通过同步带进行驱动,结构紧凑,按照人脚尖行程的大小选择行程,根据踝关节的背屈与跖屈状态调节电机的正反转,脚踝假肢的稳定性和功能性显著提高。
20.按照患者身高、足弓高度以及曲面特征、脚掌大小等进行个性化设计,实现接近人体足部的弹性形变以及脚踝假肢高度的微调,产品适配性得到了增强,提高产品的实用效果。
21.采用肌电信号控制的模式,通过肌电信号解析患者运动意图,判断患者所处的活动场地工况,在活动地点采用肌电信号控制进行不同工况下的控制模式切换,智能控制的引入能够高效地代偿脚踝残缺患者的运动功能。
附图说明
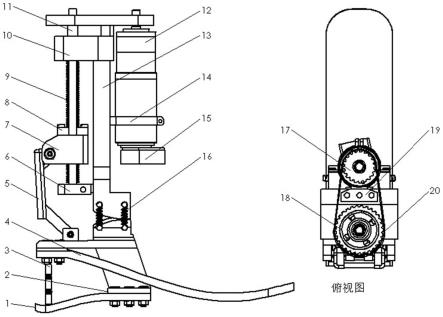
22.图1是本发明整体结构示意图。
23.图2是本发明脚跟仿形结构示意图。
24.图3是本发明脚掌仿形结构示意图。
25.图4是本发明距骨仿形结构以及其滚动面示意图。
26.图5是本发明跟腱仿形结构示意图。
27.图6是本发明滚珠丝杠滑块结构示意图。
28.图7是本发明滚珠丝杠螺母结构示意图。
29.图8是本发明胫骨仿形结构以及其滚动面示意图。
30.图9是本发明电机驱动机构示意图。
具体实施方式
31.下面结合附图和实施例,对本发明的技术方案作进一步地详细说明与描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
32.参照图1,一种基于人体结构与运动仿生的智能足踝假肢,包括脚跟仿形结构1,脚跟仿形结构1上连接有距骨仿形结构2,距骨仿形结构2与脚掌仿形结构4连接,脚跟仿形结构1与脚掌仿形结构4末端安装压缩弹簧3;距骨仿形结构2通过轴承与跟腱仿形结构5一端相连,跟腱仿形结构5另一端通过轴承与滚珠丝杠滑块7相连,滚珠丝杠滑块7上固定有滚珠丝杠螺母8,和滚珠丝杠螺母8配合的滚珠丝杠9两端通过丝杠底座6、丝杠顶部固定块10固定在胫骨仿形结构13上,丝杠底座6与丝杠顶部固定块10之间安装有滚珠丝杠支撑杆11,滚珠丝杠滑块7通过滚珠丝杠支撑杆11进行导向,胫骨仿形结构13顶端固定有假肢接受腔连接块19;
33.所述的滚珠丝杠9通过轴承连接于丝杠底座6与丝杠顶部固定块10中,由电机12驱动,电机12通过电机固定架14固定在胫骨仿形结构13上,胫骨仿形结构13与距骨仿形结构2构成滚动关节,由四个固定弹簧16连接,为滚动面提供接触力。
34.参照图2,所述的脚跟仿形结构1上设有和距骨仿形结构2连接的六个螺栓装配孔以及压缩弹簧3的第一定位柱21。
35.参照图3,为便于脚掌仿形结构4的前后调节,实现患者脚掌大小的适度调整,脚掌仿形结构4上开有u型螺栓连接孔。
36.参照图4,所述的距骨仿形结构2前端下面设有与脚跟仿形结构1连接的六个螺栓装配孔,距骨仿形结构2前端上面设有固定弹簧16的带凹槽圆柱连接凸台23,带凹槽圆柱连接凸台23上面设有第一滚动面22,为便于应用推广,对人体踝关节进行仿生研究分析,得到其关节轨迹曲线,并以该轨迹曲线为核心进行第一滚动面22的设计,第一滚动面22为一体左右对称式结构,其上设计有同样曲率的凸台结构;距骨仿形结构2后端下面设有压缩弹簧3的第二定位柱25,距骨仿形结构2后端上面设有与脚掌仿形结构4上u型螺栓连接孔装配的螺栓装配孔,距骨仿形结构2上面设有和与滚珠丝杠滑块7相连的安装轴承的方形凸台24。
37.参照图5,为提高产品的使用性,实现胫骨仿形结构13与距骨仿形结构2滚动关节的动力传递,跟腱仿形结构5一端通过轴承与距骨仿形结构2相连,另一端通过轴承与滚珠丝杠滑块7相连,采用轴承连接有效降低了跟腱仿形结构5转动过程中的摩擦力,连接方式简单且可靠。
38.参照图6-图7,所述的滚珠丝杠螺母8固定在滚珠丝杠滑块7上,固定采用螺栓连接方式,为保证可靠性通过六个螺栓孔29固定;为了增加跟腱仿形结构5运动过程中机构的灵巧性,在与滚珠丝杠滑块7连接时使用四个轴承,并排设计四个轴承孔26,为保证滚珠丝杠9
运转稳定可靠,在滚珠丝杠滑块7上设计两个导向孔27,用于装配滚珠丝杠支撑杆11。
39.参照图8,对人体踝关节进行仿生研究分析,得到其关节轨迹曲线,并以该轨迹曲线进行胫骨仿形结构13下部第二滚动面30的设计,第二滚动面30设计有凹面31,第二滚动面30与第一滚动面22配合,第一滚动面22上的凸台结构与第二滚动面30设计的凹面31配合,保证滚动关节工作的稳定性。
40.所述的脚跟仿形结构1与脚掌仿形结构4通过压缩形变配合压缩弹簧3进行正常步态行走时的储能、放能,利用脚跟仿形结构1与脚掌仿形结构4模拟人体足弓与踝关节周围的肌腱存储与释放能量,有效地减少做功,降低对患者体能的消耗。
41.参照图9,为提高运动传递效率同时,保证准确的传动比,采用电机12、小带轮17、大带轮18和同步带20构成传动机构,电机12输出轴上连接有小带轮17,小带轮17通过同步带20和大带轮18连接,大带轮18和滚珠丝杠9的输入端连接;通过小带轮17来带动大带轮18增加了传动效率,减少机构的能耗;依据足部运动的实际轨迹曲线选择电机12的行程,电机12通过编码器15捕获电机的转速及加速度信息,进而调节电机转速,保证踝关节转动幅度、速度与步行速度的匹配,电机12按照人脚尖行程的大小选择行程,根据踝关节的背屈与跖屈状态调节电机12的正反转,脚踝假肢的稳定性和功能性显著提高。
42.所述的脚跟仿形结构1与脚掌仿形结构4依据人体足弓高度以及曲面特征进行个性化设计,实现接近人体足部的弹性形变。
43.所述的电机12采用肌电信号控制的模式,通过肌电信号解析患者运动意图,判断患者所处的活动场地工况,在活动地点采用肌电控制进行不同工况下的控制模式切换,智能控制的引入能够高效地代偿脚踝残缺患者的运动功能。
44.本发明的工作原理为:
45.电机12的输出轴连接小带轮17,通过同步带20驱动滚珠丝杠大带轮18,带动滚珠丝杠9转动,在滚珠丝杠9的转动带动下,滚珠丝杠滑块7在滚珠丝杠9上进行往复运动;距骨仿形件2在跟腱仿形结构5的推动作用下沿着第一滚动面22滚动,其中滚动关节通过距骨仿形件2滚动面凸台与胫骨仿形结构13的凹面配合避免横向滑动,脚跟仿形结构1和脚掌仿形结构4在滚动关节的带动下实现有效的背屈与跖屈运动。
46.以上实施方式仅用于说明本发明,而非对本发明的限制,有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本发明的范畴,本发明的保护范围应由权利要求限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。