1.本公开涉及电梯的三维数据的处理装置。
背景技术:
2.专利文献1公开了一种电梯的数据的处理装置。根据该处理装置,能够计算井道的数据的各构造的尺寸。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第6322544号公报
技术实现要素:
6.发明要解决的问题
7.但是,在专利文献1所记载的处理装置中,需要进行3d模型生成。因此,处理装置的负荷高。
8.本公开是为了解决上述问题而完成的。本公开的目的在于,提供一种能够降低计算的负荷的电梯的三维数据的处理装置。
9.用于解决问题的手段
10.本公开的电梯的三维数据的处理装置具备:投影图像生成部,其在电梯的井道的三维数据相对于预先设定的坐标系进行了排列时,根据该三维数据生成二维的投影图像;投影图像特征提取部,其提取由所述投影图像生成部生成的投影图像的特征;以及基准位置确定部,其根据由所述投影图像特征提取部提取出的特征确定该三维数据的处理的基准位置。
11.发明的效果
12.根据本公开,处理装置根据井道的三维数据生成二维的投影图像。处理装置从二维的投影图像中提取特征。处理装置根据二维的投影图像的特征确定井道的三维数据的处理的基准位置。因此,能够降低计算的负荷。
附图说明
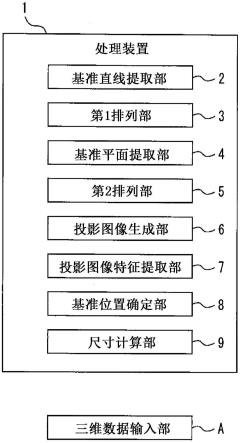
13.图1是应用实施方式1中的电梯的三维数据的处理装置的处理系统的框图。
14.图2是用于说明应用实施方式1中的电梯的三维数据的处理装置的处理系统的三维数据输入部a的图。
15.图3是用于说明实施方式1中的电梯的三维数据的处理装置的基准直线提取部和第1排列部的图。
16.图4是用于说明实施方式1中的电梯的三维数据的处理装置的基准直线提取部的图。
17.图5是用于说明实施方式1中的电梯的三维数据的处理装置的基准直线提取部的
图。
18.图6是用于说明实施方式1中的电梯的三维数据的处理装置的基准直线提取部的图。
19.图7是用于说明实施方式1中的电梯的三维数据的处理装置的基准直线提取部的图。
20.图8是用于说明实施方式1中的电梯的三维数据的处理装置的基准平面提取部的图。
21.图9是用于说明实施方式1中的电梯的三维数据的处理装置的基准平面提取部的图。
22.图10是用于说明实施方式1中的电梯的三维数据的处理装置的基准平面提取部的图。
23.图11是用于说明实施方式1中的电梯的三维数据的处理装置的基准平面提取部的图。
24.图12是用于说明实施方式1中的电梯的三维数据的处理装置的第2排列部的图。
25.图13是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像生成部的图。
26.图14是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像生成部的图。
27.图15是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像生成部的图。
28.图16是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
29.图17是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
30.图18是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
31.图19是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
32.图20是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
33.图21是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
34.图22是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
35.图23是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
36.图24是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
37.图25是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取
部的图。
38.图26是用于说明实施方式1中的电梯的三维数据的处理装置的尺寸计算部的图。
39.图27是用于说明实施方式1中的电梯的三维数据的处理装置的尺寸计算部的图。
40.图28是用于说明实施方式1中的电梯的三维数据的处理装置的尺寸计算部的图。
41.图29是实施方式1中的电梯的三维数据的处理装置的硬件结构图。
42.图30是用于说明实施方式2中的电梯的三维数据的处理装置的图。
43.图31是用于说明实施方式2中的电梯的三维数据的处理装置的图。
44.图32是用于说明实施方式2中的电梯的三维数据的处理装置的图。
45.图33是用于说明实施方式2中的电梯的三维数据的处理装置的图。
46.图34是用于说明实施方式2中的电梯的三维数据的处理装置的图。
47.图35是应用实施方式3中的电梯的三维数据的处理装置的处理系统的框图。
48.图36是用于说明实施方式3中的电梯的三维数据的处理装置的平面提取部的图。
49.图37是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
50.图38是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
51.图39是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
52.图40是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
53.图41是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
54.图42是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
55.图43是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
56.图44是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
57.图45是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
58.图46是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
59.图47是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部11的图。
60.图48是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
具体实施方式
61.按照附图对实施方式进行说明。另外,在各图中,针对相同或相当的部分标注相同的标号。适当简化或省略该部分的重复说明。
62.实施方式1
63.图1是应用实施方式1中的电梯的三维数据的处理装置的处理系统的框图。
64.如图1所示,处理系统具备三维数据输入部a和处理装置1。
65.处理装置1具备基准直线提取部2、第1排列部3、基准平面提取部4、第2排列部5、投影图像生成部6、投影图像特征提取部7、基准位置确定部8以及尺寸计算部9。
66.接着,使用图2对三维数据输入部a进行说明。
67.图2是用于说明应用实施方式1中的电梯的三维数据的处理装置的处理系统的三维数据输入部a的图。
68.在图2中,例如,三维数据输入部a是三维计测传感器。例如,三维数据输入部a是激光扫描仪。例如,三维数据输入部a是rgbd相机。例如,三维数据输入部a在暂时安装于电梯
的井道的状态下取得井道的三维点云。例如,三维数据输入部a将与电梯的轿厢一起移动并通过slam(simultaneously localization and mapping:同时定位和映射)等技术在移动时间点得到的三维点云连在一起而取得井道的三维点云。例如,三维数据输入部a在离线的状态下将通过不同的2个以上的计测试验取得的点云连在一起而取得井道的三维点云。
69.接着,使用图3至图7,对基准直线提取部2和第1排列部3进行说明。
70.图3是用于说明实施方式1中的电梯的三维数据的处理装置的基准直线提取部和第1排列部的图。图4至图7是用于说明实施方式1中的电梯的三维数据的处理装置的基准直线提取部的图。
71.基准直线提取部2提取基准直线,该基准直线用于与x轴、y轴及z轴中的任意轴一致而排列(align)井道的三维点云。
72.例如,如图3所示,基准直线提取部2提取层站地坎与层站门之间的边界线作为基准直线。具体而言,基准直线提取部2生成某一楼层的层站地坎周边的投影图像。例如,基准直线提取部2将与xy平面平行的平面设为投影面,生成将位于z坐标值为负的范围内的点云投影到投影面的投影图像。
73.在针对投影区域的大小设x轴方向的投影区域的大小(井道横宽方向)为lx[m]、设y轴方向的大小(井道高度方向)为ly[m]、设z轴方向的大小(井道的进深方向)为lz[m]时,基准直线提取部2将投影图像的大小决定为,宽度:αlx[pix],高度:αly[pix]。这里,α是投影时的比例系数。
[0074]
例如,在事先决定了比例系数α、投影区域的大小lx、ly、lz,三维数据输入部a的计测时的设置位置大致为井道的中心、并且三维数据输入部a的中心与层站地坎的高度大致一致的情况下,基准直线提取部2将投影区域的中心x、y坐标cx、cy分别看作是0,基于点云的边界框的信息而仅决定剩余的cz。
[0075]
具体而言,基准直线提取部2将对计测出的点云实施下采样、噪声去除处理等而得到的点云作为对象来计算边界框,计算z坐标值的最小值。在井道的构造上,z坐标值的最小值附近成为壁面或层站门。因此,基准直线提取部2将对z坐标值的最小值加上事先决定的余量后的z坐标值作为cz。
[0076]
例如,作为不依赖于三维数据输入部a的计测时的设置位置的方法,在事先决定了α、lx、ly、lz的情况下,基准直线提取部2促使用户针对在图3中通过未图示的点云显示设备而提示的点云数据进行任意的指定,由此决定cx、cy、cz的位置。
[0077]
在原始的点云具有彩色信息且投影图像是彩色图像的情况下,基准直线提取部2采用成为投影源的点的rgb值直接作为像素值。例如,在投影图像是灰度图像的情况下,基准直线提取部2采用将rgb值转换成灰度而得到的值作为像素值。例如,基准直线提取部2采用z坐标值的值作为像素值。例如,在原始的点云如激光的反射强度值那样具有灰度值的情况下,基准直线提取部2采用灰度值作为像素值。例如,基准直线提取部2分别单独地制作例示的多个像素值。
[0078]
如图4所示,在成为多个点云的投影图像的特定像素的情况下,基准直线提取部2根据该多个点云的像素值的统计量来决定该像素的像素值。例如,基准直线提取部2将该多个点云的rgb值的平均值设为该像素的像素值。例如,基准直线提取部2挑选z坐标值最接近原点的坐标的点作为代表点,将该坐标的像素值设为该像素的像素值。
[0079]
例如,如图5所示,基准直线提取部2通过投影图像上的水平方向的边缘检测处理来提取层站地坎与层站门之间的边界线。
[0080]
例如,基准直线提取部2对投影图像应用水平方向的边缘检测器来检测边缘。基准直线提取部2通过ransac(random sample consensus:随机样本一致性)等对边缘图像应用直线模型,由此提取层站地坎与层站门之间的边界线。
[0081]
例如,如图6所示,基准直线提取部2从轿厢轨道、立柱等沿铅垂方向延伸的直线状的构造中提取基准直线。
[0082]
在轿厢轨道为基准直线的情况下,设为三维数据输入部a的计测时的设置位置大致是井道中心,比例系数α与投影区域的z轴方向的长度(lz)被事先决定。lx是根据新安装时的图纸并以轿厢轨道末端间距离(bg)为基准而决定的。例如,lx成为对bg加上余量宽度而得到的值。ly是基于去除了噪声的点云的边界框的y方向的长度而决定的。例如,ly成为从箱体y方向的长度减去余量宽度而得到的值。区域的中心的cx、cz被设为0。cy为去除了噪声的点云的边界框的中心y坐标。
[0083]
基准直线提取部2通过将该投影范围内的点云投影到与xy平面平行的投影面而生成投影图像。例如,基准直线提取部2将投影方向设为z轴的正方向而生成投影图像。例如,基准直线提取部2将投影方向设为z轴的负方向而生成投影图像。
[0084]
另外,也可以通过点云显示设备促使用户对所提示的点云数据进行任意的指定,从而决定cx、cy、cz。
[0085]
如图7所示,基准直线提取部2通过投影图像上的铅垂方向的边缘检测处理来提取与左右的轿厢轨道的末端相当的直线。
[0086]
例如,基准直线提取部2对投影图像应用铅垂方向的边缘检测器来检测边缘。例如,基准直线提取部2通过进行仅残留在正方向和负方向上分别最接近投影图像x坐标中心的边缘的过滤,来提取与左右的轿厢轨道的末端分别相当的边缘。此时,基准直线提取部2通过ransac等对边缘图像应用直线模型而提取直线。
[0087]
此时,提取与左右轿厢轨道相当的直线中的至少一方即可。此外,也可以成对地将双方作为平行的直线的组而提取。
[0088]
另外,也可以在直线模型拟合之前,进行基于中值滤波、膨胀处理、收缩处理等的噪声去除处理、边缘连结处理这样的预处理。也可以通过霍夫变换来提取直线。在投影图像中存在多个种类的情况下,也可以根据多个边缘信息来提取直线。例如,在存在将点云的rgb值作为像素值的投影图像和将z坐标值作为像素值的投影图像的情况下,也可以从双方的投影图像中检测边缘,根据双方的边缘信息来提取直线。
[0089]
第1排列部3针对点云数据,以基准直线与xyz坐标系的任意轴平行的方式转换坐标。
[0090]
例如,在提取了层站地坎上端线作为基准直线的情况下,第1排列部3计算从投影图像中检测到的层站地坎上端线与图像水平线所成的角α,使原始的点云数据绕z轴反向地旋转α。
[0091]
例如,如图3所示,在提取了轿厢轨道的左右末端直线作为基准直线的情况下,第1排列部3计算从投影图像中检测到的左右末端直线与图像铅垂线所成的角α,使原始的点云数据绕z轴反向地旋转α。
[0092]
例如,在左右单独地提取了左右轿厢轨道末端直线的情况下,第1排列部3计算各个轿厢轨道与图像铅垂线所成的角α1、α2的平均,使原始的点云数据绕z轴反向地旋转α1与α2的平均角度的量。
[0093]
接着,使用图8至图11,对基准平面提取部4进行说明。
[0094]
图8至图11是用于说明实施方式1中的电梯的三维数据的处理装置的基准平面提取部的图。
[0095]
基准平面提取部4提取如下平面,该平面用于相对于基准直线中未成为排列基准的剩余的2个轴来排列井道的三维数据。例如,基准平面提取部4提取将左右的轿厢轨道的末端间连结而得到的平面作为基准平面。
[0096]
如图8所示,基准平面提取部4设定井道的顶棚方向或底面方向上的图像的横轴及纵轴与三维坐标系的x轴及z轴平行的虚拟投影面。基准平面提取部4与基准直线提取部2同样地生成投影图像。此时,基准平面提取部4根据三维坐标系的y轴值而生成多个投影图像。例如,基准平面提取部4按照点云数据的从上到下预先设定的间隔,按照预先设定的大小的每个投影对象区域生成投影图像。
[0097]
如图9所示,基准平面提取部4针对各个投影图像,成对地提取左右的轿厢轨道末端位置。例如,基准平面提取部4基于轿厢轨道的投影图像上的图案特征,成对地提取左右的轿厢轨道末端位置。
[0098]
从事先的信息中得到轿厢轨道的规格、轿厢轨道间的距离。因此,基准平面提取部4基于显现在投影图像中的左右轿厢轨道各自的理想外观,制作成对的模型图像。
[0099]
基准平面提取部4针对各个投影图像,进行将左右轿厢轨道的模型图像作为基准模板的模板匹配。此时,基准平面提取部4不是仅使模板的位置变化,还使其在预先设定的范围内旋转来进行模板匹配。例如,基准平面提取部4扫描基准模板而进行稀疏搜索,在稀疏搜索的匹配位置附近还使用旋转的模板来进行密集搜索。
[0100]
另外,也可以左右分别制作模型图像。
[0101]
如图10所示,基准平面提取部4在各个投影图像中基于模板的位置和旋转角,计算所匹配的左右的轿厢轨道的末端位置在投影图像上的位置。此时,基准平面提取部4通过原本在模板图像中预先定义左右轨道末端位置,计算所匹配的左右的轿厢轨道的末端位置在投影图像上的位置。
[0102]
基准平面提取部4在三维坐标上计算左右的轿厢轨道的末端的坐标。此时,基准平面提取部4基于原始的投影区域的高度来决定左右的轿厢轨道的末端的y坐标值。例如,基准平面提取部4采用原始的投影区域的中间的y坐标值作为左右的轿厢轨道的末端的y坐标值。
[0103]
例如,如图11所示,基准平面提取部4针对k个投影图像进行同样的处理,由此取得2k个三维位置作为左右的轿厢轨道的末端位置。基准平面提取部4对2k个三维位置进行三维平面的模型拟合。例如,基准平面提取部4通过最小二乘法来估计三维平面。基准平面提取部4将估计出的三维平面设为连结左右的轿厢轨道的末端间而得到的平面来提取基准平面。
[0104]
接着,使用图12对第2排列部5进行说明。
[0105]
图12是用于说明实施方式1中的电梯的三维数据的处理装置的第2排列部的图。
[0106]
第2排列部5使点云数据相对于如下旋转轴进行旋转,使得基准平面的法线与x轴、y轴及z轴中的任意轴平行,由此对点云数据进行排列,其中,第1排列部3未使点云数据绕所述旋转轴旋转。
[0107]
例如,在第1排列部3基于层站地坎的上端线进行旋转的状态下并且在左右的轿厢轨道的末端间的平面被设为基准平面的情况下,如图12所示,第2排列部5使点云数据绕x轴以及绕y轴进行旋转,使得基准平面的法线与z轴方向平行,由此对点云数据进行排列。
[0108]
另外也可以反复进行基于基准直线提取部2的基准直线的提取至基于第2排列部5的点云数据的排列。
[0109]
此外,也可以在基准平面提取部4中先提取基准平面。在该情况下,在第1排列部3中,根据由基准平面提取部4提取出的基准平面对井道的三维数据进行排列即可。之后,在基准直线提取部2中,从由第1排列部3排列的三维数据中提取井道的基准直线即可。之后,在第2排列部5中,根据由基准直线提取部2提取出的基准直线对由第1排列部3排列后的三维数据进行排列即可。
[0110]
此时,在基准平面提取部4中,也可以提取具有与xyz坐标系的x轴、y轴及z轴中的任意1个轴平行的法线的基准平面。在基准直线提取部2中,也可以提取与由基准平面提取部提取出的平面的法线垂直的基准直线。
[0111]
例如,在基准平面提取部4中,也可以提取与将一对轿厢轨道的直线状的末端连结的平面平行的平面作为基准平面。例如,在基准直线提取部2中,也可以提取平行于层站地坎与层站门之间的边界线的直线作为基准直线。
[0112]
接着,使用图13至图15,对投影图像生成部6进行说明。
[0113]
图13至图15是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像生成部的图。
[0114]
如图13所示,投影图像生成部6将井道的层站侧的壁面、左壁面、右壁面、后壁面以及底面方向中的任意的壁面方向决定为二维的投影面。
[0115]
例如,投影图像的大小根据包围点云数据整体的边界框决定。例如,投影图像的大小由事先决定的值决定。
[0116]
例如,投影图像生成部6针对实施了下采样、噪声去除处理的点云数据计算边界框。在边界框中,在x轴方向的大小为lx[m]、y轴方向的大小为ly[m]、z轴方向的大小为lz[m]的情况下,投影图像生成部6将以层站方向为投影方向的投影图像的宽度设为αlx[pix],将高度设为αly[pix]。这里,α是投影时的比例系数。
[0117]
例如,如图14所示,进行投影的点云数据的范围是基于轴方向的坐标值而决定的。如果是向层站侧壁面的投影,则仅将z轴坐标值为负的点云设为投影对象。如果进一步限定范围,则例如将z轴坐标值为负的点云中的、z坐标值位于za β1[mm]至za-β2[mm]的范围的点云设为投影对象。
[0118]
例如,za被事先决定。例如,za是根据z坐标值的中间值或平均值而决定的。例如,β1和β2被事先决定。例如,β1和β2是根据z坐标值为负的点云的z坐标值的方差等统计量而动态决定的。例如,x坐标值和y坐标值的投影对象基于预先设定的地坎被限定。
[0119]
此时的投影图像是与图4相同的投影图像。
[0120]
如图15所示,投影图像成为以井道的中心为视点而朝向井道的层站侧的壁面、左
壁面、右壁面、后壁面以及底面方向的图像。
[0121]
接着,使用图16至图25,对投影图像特征提取部7进行说明。
[0122]
图16至图25是用于说明实施方式1中的电梯的三维数据的处理装置的投影图像特征提取部的图。
[0123]
投影图像特征提取部7从投影图像中提取成为应计算的尺寸的起点的对象的特征。
[0124]
例如,投影图像特征提取部7从向层站侧的壁面投影的投影图像中提取层站地坎的上端线。投影图像特征提取部7通过与基准直线提取部2相同的方法来提取层站地坎的上端线。
[0125]
在已经提取了层站地坎的上端线的情况下,在投影图像特征提取部7中,可以省略该提取处理,也可以重新进行本提取处理。
[0126]
在原本的点云数据由单楼层构成的情况下,从抑制误检测的观点出发,投影图像特征提取部7为了确定层站地坎的大致位置而设定处理对象范围。
[0127]
在根据项目表等而知晓构成层站地坎的部分的结构和大小等的情况下,如图16所示,投影图像特征提取部7制作出对层站地坎附近的形状构造进行表征的二维图案作为初始模板。投影图像特征提取部7使该初始模板在投影图像上扫描而进行模板匹配,将最一致的位置的附近设为处理对象范围。例如,投影图像特征提取部7将以一致位置为中心的与初始模板相同的大小的矩形、或者对初始模板追加了余量宽度的大小的矩形设为处理对象范围。在完全不存在事先信息的情况下,例如,投影图像特征提取部7将沿纵向将图像分割为三部分时的中间区域设为处理对象范围,或者将沿纵向将图像分割为两部分的下侧的区域设为处理对象范围。在计算出层站地坎的大致位置的情况下,投影图像特征提取部7重新利用层站地坎的位置的信息而设为处理对象范围。
[0128]
如图17所示,投影图像特征提取部7针对处理对象范围应用水平方向的边缘检测器来检测横向的边缘,通过对边缘图像应用使用了ransac等的水平线模型来提取1条水平线。
[0129]
另外,也可以在直线模型拟合之前,进行基于中值滤波、膨胀处理、收缩处理等的噪声去除处理、边缘连结处理这样的预处理。也可以通过霍夫变换来提取直线。在投影图像中存在多个种类的情况下,也可以根据多个边缘信息来提取直线。例如,在存在将点云的rgb值作为像素值的投影图像和将z坐标值作为像素值的投影图像的情况下,也可以从双方的投影图像中检测边缘,根据双方的边缘信息来检测直线。
[0130]
在投影图像由多个楼层构成的情况下,如图18所示,投影图像特征提取部7从多个楼层限定到1个楼层来提取层站地坎的上端线。
[0131]
投影图像特征提取部7制作与单楼层的情况相同的初始模板。投影图像特征提取部7通过使初始模板与投影图像匹配,来设定某个楼层的层站地坎周边的处理对象区域。此时,初始模板的扫描范围可以是投影图像整体,也可以将沿纵向对投影图像进行等分割而得到的任意部分限定为范围。
[0132]
投影图像特征提取部7针对某一楼层的层站地坎周边的处理对象区域,与单楼层的情况同样,通过水平方向的直线模型拟合等来提取该楼层的层站地坎的上端线。
[0133]
如图19所示,投影图像特征提取部7基于最初检测到的层站地坎上端线的位置,来
设定剩余楼层中的层站地坎的上端线检测范围。例如,投影图像特征提取部7以最初检测到的层站地坎上端线为基准,抽出预先设定的大小的矩形区域的纹理图案本身作为模板,通过该模板匹配,确定与剩余楼层相关的处理对象区域。
[0134]
例如,在楼层的数量为k个的情况下,投影图像特征提取部7相对于提取为模板的区域以外的区域来扫描模板,将匹配分数高的上位k-1个决定为剩余楼层的处理对象区域。此时,投影图像特征提取部7并非单纯地选择上位k-1个,也考虑匹配位置的空间的接近性。例如,在上位k-1个中存在l个空间距离与某个匹配位置相互过近的匹配位置的情况下,投影图像特征提取部7仅采用匹配分数最高的位置作为结果,将剩余(l-1)从选择中排除。
[0135]
投影图像特征提取部7新采用分数的高度从最开始第k个到第k-1 (l-1)个的匹配位置。投影图像特征提取部7反复进行该处理,直至无论针对哪个匹配位置都不存在空间距离彼此过近的匹配位置,由此最终地决定k-1个。
[0136]
在根据新安装时的图纸等大体知晓作为对象的井道的楼层间距离的情况下,投影提取部通过利用事先信息,来缩小模板匹配的范围并削减计算时间,并且,抑制模板的误对应,提高结果的稳健性。具体而言,如图20所示,投影图像特征提取部7以最初提取出的层站地坎上端线为基准,设定为以在投影图像的纵向上分离了如下长度的位置为中心位置的扫描范围,所述长度是将楼层间设计值按比例缩放为投影图像上的长度的值。
[0137]
投影图像特征提取部7在设定了与其他楼层相关的处理对象区域之后,针对它们分别进行与单楼层的情况相同的基于横向的边缘检测的直线模型拟合等,提取与各个楼层相关的层站地坎的上端线。
[0138]
另外,也可以应用通常的直线(ax by c=0)模型,提取层站地坎的上端线作为具有倾斜度的直线。
[0139]
此外,投影图像特征提取部7与基准平面提取部4同样地,从向底面方向投影的投影图像中提取左右的轿厢轨道的末端位置。在基准平面提取部4提取了左侧的导轨的末端位置时,投影图像特征提取部7可以省略该提取处理,也可以重新进行提取处理。
[0140]
投影图像特征提取部7从向左右壁面或后壁面投影的投影图像中提取立柱的左右端线。
[0141]
在所排列的点云数据中,立柱与y轴平行。在投影图像上,立柱的左右端线显现为铅垂线。
[0142]
投影图像特征提取部7在从投影图像提取的纵向的直线中提取相对长的直线。
[0143]
另一方面,在井道左右壁面存在轿厢轨道、沿着壁配置的缆线等,因此,在投影图像中,由其他构造物产生的大量纵边缘以噪声的形式显现。投影图像特征提取部7抑制这些噪声的影响,稳健地提取立柱的左右端线。
[0144]
另外,即便立柱为h型钢,也能够通过本方法同样地进行处理。
[0145]
如图21所示,位于左右壁面的前方的立柱位于与井道的壁面稍微分离的位置,并且存在于轿厢轨道与壁面之间。在所排列的点云数据中,向左右壁面方向投影的投影图像是向x轴正(右侧壁面)、负(左侧壁面)投影的投影图像。因此,投影图像特征提取部7从自轿厢轨道的背面位置x坐标到壁面的x坐标的范围进一步考虑余量来限定要投影的点云的范围,由此,生成提取出了与立柱相当的点云的投影图像。
[0146]
事先设定余量即可,也可以基于三维数据输入部a的测距误差特性来设定余量。如
果提取轿厢轨道的末端位置,则根据轿厢轨道的规格信息来估计轿厢轨道的背面位置的x坐标。根据针对位于比轿厢轨道背面位置x远的位置的点云的x坐标值整体的中间值、平均值等,来计算与壁面相当的平面的x坐标。也可以对这些部分的点云进行平面拟合。
[0147]
如图22所示,位于后壁面的前方的立柱位于与井道的壁面稍微分离的位置。在所排列的点云数据中,向后壁面方向投影的投影图像是向z轴正方向投影的投影图像。因此,通过从自壁面的z坐标到壁面的z坐标-常数α的范围进一步考虑余量来限定要投影的点云的z坐标值的范围,从而生成提取出了与立柱相当的点云的投影图像。事先设定余量即可,也可以基于传感器的测距误差特性来设定余量。
[0148]
根据点云的外接矩形信息等来决定用于计算与后壁面相当的平面的z坐标的范围,根据针对该范围的点云的z坐标的中间值、平均值等来计算与后壁面相当的平面的z坐标。
[0149]
另外,关于常数α,也可以基于在根据通常的建筑基准等估算的立柱设置位置处最远离壁面而设置的情况下的宽度来决定,也可以设定根据新安装时的图纸而估算的值。
[0150]
如图23所示,投影图像特征提取部7针对限定为立柱的投影图像,应用铅垂方向的边缘检测器来检测铅垂方向的边缘。投影图像特征提取部7对边缘图像应用使用了ransac等的铅垂直线模型而提取直线。
[0151]
另外,也可以提取直线来作为铅垂平行线的组的模型。
[0152]
另外,也可以在直线模型拟合之前,进行基于中值滤波、膨胀处理、收缩处理等的噪声去除处理、边缘连结处理这样的预处理。也可以通过霍夫变换来提取直线。在投影图像中存在多个种类的情况下,也可以根据多个边缘信息来提取直线。例如,在存在将点云的rgb值作为像素值的投影图像和将z坐标值作为像素值的投影图像的情况下,也可以从双方的投影图像中检测边缘,根据双方的边缘信息来提取直线。
[0153]
如图24所示,也可以经由点云数据的显示设备,促使用户进行“立柱点的选择”,使用户指定属于立柱的点云中的1个点。也可以针对用户所指定的点,将预先设定的范围的点云选择框设为投影范围而生成投影图像。在该情况下,1根立柱需要1张投影图像。因此,虽然提取全部立柱时的处理效率变差,但与投影范围被限定相应地,能够相对于噪声更加稳健且高精度地提取立柱。
[0154]
如图25所示,在所排列的点云数据中,梁的上下端与x轴平行。在投影图像上,梁的上下端显现为水平线。梁的上下端在从投影图像中检测的横向的直线中显现为相对长的直线。投影图像特征提取部7通过在立柱的左右端的提取中将铅垂方向作为水平方向进行同样的处理,来提取梁的上下端。
[0155]
另外,关于立柱的左右端、梁的上下端等在投影图像上作为铅垂方向或水平方向的直线而检测到的构造,也可以从投影图像上提取长度、倾斜度等满足一定条件的全部铅垂线/水平线作为候选。在该情况下,将这些直线群转换成三维坐标系中的平面群之后通过点云数据显示设备向用户提示即可。此时,用户通过点云数据显示设备选择需要的内容即可。
[0156]
基准位置确定部8确定层站地坎的上端、轿厢轨道间的平面、立柱的左右端等成为计算尺寸的起点的位置。例如,基准位置确定部8几乎直接利用投影图像特征提取部7的提取结果。
[0157]
例如,基准位置确定部8将向层站侧壁面方向投影的投影图像上与各楼层相关的层站地坎上端线转换成xyz坐标系。尺寸起点确定部计算在xyz坐标系中通过直线且法线与z轴垂直的平面作为层站地坎的上端平面。尺寸起点确定部将与各楼层相关的层站地坎的上端平面设为尺寸计算的起点。
[0158]
例如,基准位置确定部8从多个投影图像中分别提取左右的轿厢轨道的末端位置。基准位置确定部8将左右的轿厢轨道的末端位置转换成xyz坐标系。基准位置确定部8将针对三维空间上的这多个左右轿厢轨道末端位置施加三维平面拟合而得到的结果设为轿厢轨道间平面。另外,在已经提取出轿厢轨道间平面的情况下,也可以直接流用所提取的轿厢轨道间平面。
[0159]
接着,不使用图而说明基准位置确定部8。
[0160]
基准位置确定部8针对xyz坐标系中的左右的各个末端位置,分别计算平均位置。基准位置确定部8将各个平均位置设为左轿厢轨道末端位置、右轿厢轨道末端位置。基准位置确定部8将通过左轿厢轨道末端位置且与轿厢轨道平面垂直的平面设为左轿厢轨道末端平面。基准位置确定部8将通过右轿厢轨道末端位置且与轿厢轨道平面垂直的平面设为右轿厢轨道末端平面。例如,基准位置确定部8将这些平面和位置作为尺寸计算的起点。
[0161]
例如,基准位置确定部8计算在xyz坐标系中通过该直线且法线与x轴垂直的平面,作为位于左右壁面的前方的立柱左右端平面。例如,基准位置确定部8计算在xyz坐标系中通过该直线且法线与z轴垂直的平面,作为位于后壁面的前方的立柱后端平面。例如,基准位置确定部8将立柱的左右端平面作为尺寸计算的起点。
[0162]
例如,基准位置确定部8计算在xyz坐标系中通过该直线且法线与x轴垂直的平面,作为位于左右壁面或后壁面的梁的上下端平面。例如,基准位置确定部8将梁的上下端平面作为尺寸计算的起点。
[0163]
接着,使用图26至图28对尺寸计算部9进行说明。
[0164]
图26至图28是用于说明实施方式1中的电梯的三维数据的处理装置的尺寸计算部的图。
[0165]
尺寸计算部9以作为尺寸计算的起点而计算出的平面或位置为基准来计算尺寸。
[0166]
例如,如图26所示,尺寸计算部9通过计算层站地坎的上端平面与属于地面的点云之间的距离来计算底坑的深度pd。例如,尺寸计算部9通过计算梁的下端平面与属于地面的点云之间的距离来计算梁的高度。例如,尺寸计算部9根据梁的上下端平面的高度之差来计算梁的厚度。
[0167]
例如,尺寸计算部9计算轨道间平面与属于后壁面的点云之间的距离。例如,尺寸计算部9计算轨道间平面与属于层站地坎的点云之间的距离。例如,尺寸计算部9通过将轨道间平面与属于后壁面的点云之间的距离及轨道间平面与属于层站地坎的点云之间的距离相加来计算井道的进深bh。
[0168]
例如,尺寸计算部9针对左侧、右侧的各个轿厢轨道末端平面,计算与属于左右的各个壁面的点云之间的距离。例如,尺寸计算部9计算左右轿厢轨道末端位置之间的距离。例如,尺寸计算部9将它们相加。例如,尺寸计算部9向它们加上作为轨道的标准信息的左右轨道高度来计算井道的横宽ah。
[0169]
另外,在最下层,有时在比楼板平面靠下的壁面通过砂浆等进行防水加工。在该情
况下,期望在楼板平面的上下对尺寸计算进行区分。例如,利用层站地坎的上端平面将井道的三维数据分割为上下两部分,在上下分别进行测量尺寸即可。
[0170]
例如,如图28所示,尺寸计算部9计算属于各壁面的点云与立柱端平面之间的距离。
[0171]
根据以上说明的实施方式1,处理装置1从井道的三维数据中提取井道的基准直线和基准平面,对井道的三维数据进行排列。因此,无需特殊的标记就能够对井道的三维数据进行排列。
[0172]
此外,处理装置1提取与xyz坐标系的x轴、y轴及z轴中的任意1个轴平行的基准直线。处理装置1提取具有与由基准直线提取出的基准平行的法线的基准平面。因此,能够使井道的三维数据更加准确地排列。
[0173]
此外,处理装置1提取平行于层站地坎与层站门之间的边界线的直线作为基准直线。处理装置1提取与连结一对轿厢轨道的直线状的末端的平面平行的平面作为基准平面。因此,能够使井道的三维数据更加准确地排列。
[0174]
此外,处理装置1根据井道的三维数据而生成二维的投影图像。处理装置1从二维的投影图像中提取特征。处理装置1根据二维的投影图像的特征确定井道的三维数据的处理的基准位置。因此,能够降低处理装置1的计算负荷。其结果是,能够降低处理装置1的处理成本。
[0175]
此外,处理装置1基于投影点的颜色的信息、反射强度的信息以及坐标值的信息中的任意一方来决定投影图像的像素值。因此,能够更加可靠地提取二维的投影图像的特征。
[0176]
此外,处理装置1确定计算井道的尺寸时的基准位置作为三维数据的处理的基准位置。因此,能够更加准确地计算井道中的各构造的尺寸。
[0177]
此外,处理装置1将井道的侧面或地面作为投影方向,根据该三维数据而生成二维的投影图像。例如,处理装置1基于通过层站地坎的上端部的平面来确定基准位置。例如,处理装置1基于连结一对轿厢轨道的末端部而得到的轨道间平面来确定基准位置。例如,处理装置1基于与轨道间平面垂直的平面来确定基准位置。例如,处理装置1基于通过立柱的左右的端部的平面来确定基准位置。例如,处理装置1基于通过梁的上下端部的平面来确定基准位置。因此,能够更加准确地计算井道中的各种构造的尺寸。
[0178]
接着,使用图29对处理装置1的例子进行说明。
[0179]
图29是实施方式1中的电梯的三维数据的处理装置的硬件结构图。
[0180]
处理装置1的各功能能够由处理电路实现。例如,处理电路具备至少1个处理器100a和至少1个存储器100b。例如,处理电路具备至少1个专用的硬件200。
[0181]
在处理电路具备至少1个处理器100a和至少1个存储器100b的情况下,处理装置1的各功能由软件、固件、或者软件与固件的组合实现。软件和固件中的至少一方以程序的形式记述。软件和固件中的至少一方存储于至少1个存储器100b。至少1个处理器100a通过读出并执行存储于至少1个存储器100b的程序,来实现处理装置1的各功能。至少1个处理器100a也称为中央处理装置、运算装置、微处理器、微型计算机、dsp。例如,至少1个存储器100b是ram、rom、闪存、eprom、eeprom等非易失性或易失性的半导体存储器、磁盘、软盘、光盘、高密度盘、迷你盘、dvd等。
[0182]
在处理电路具备至少1个专用的硬件200的情况下,处理电路例如通过单一电路、
复合电路、程序化的处理器、并行程序化的处理器、asic、fpga、或者它们的组合来实现。例如,处理装置1的各功能分别由处理电路实现。例如,处理装置1的各功能统一由处理电路实现。
[0183]
关于处理装置1的各功能,也可以由专用的硬件200实现一部分,由软件或固件实现其他部分。例如,也可以是,通过作为专用的硬件200的处理电路来实现投影图像特征提取部7的功能,通过至少1个处理器100a读出并执行存储于至少1个存储器100b的程序来实现投影图像特征提取部7的功能以外的功能。
[0184]
这样,处理电路通过硬件200、软件、固件、或者它们的组合来实现处理装置1的各功能。
[0185]
实施方式2
[0186]
图30至图34是用于说明实施方式2中的电梯的三维数据的处理装置的图。另外,针对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
[0187]
在实施方式2中,处理装置1从生成的投影图像中提取用于按照每个楼层对井道数据进行分割的特征。例如,处理装置1检测1个层站地坎周边图案的代表位置,通过提取代表位置的相似图案来确定其他的层站位置。
[0188]
虽然未图示,但投影图像特征提取部7的初始模板使用将地坎轨道和护脚板作为模型的初始模板。另外,也可以使用包含门构造等的更宽范围的初始模板。
[0189]
在进行模板匹配时,可以将模板的扫描范围设为投影图像整体,也可以限定模板的扫描范围。
[0190]
例如,也可以是,以图像中心为中心,将能够考虑为井道的楼层间距离的最大距离的大小[mm]转换成图像上的大小[pix],将以其作为纵向大小的矩形区域设为搜索范围而进行模板匹配。或者,也可以通过点云数据显示设备,使用户选择层站地坎近边的点,以选择出的点为中心来决定搜索范围。
[0191]
例如,在不存在项目表等事先信息的情况下,在层站地坎与层站门之间的边界或者层站地坎与护脚板之间的边界,存在作为构造的凹凸。因此,在投影图像的像素值是基于点云的彩色信息或者z坐标值的像素值的情况下,在投影图像上显现出清晰的横边缘。
[0192]
在该情况下,如图31所示,投影图像特征提取部7对投影图像应用水平方向的边缘检测器来检测横向的边缘,通过边缘的连结处理而进行线段化。投影图像特征提取部7将这些线段中的最长的线段决定为代表位置。该线段有时也作为相对于投影图像在图像上具有倾斜度的线段而被提取。在该情况下,投影图像特征提取部7将该线段的中心位置决定为代表位置。
[0193]
投影图像特征提取部7以代表位置为基准,来计算投影图像中的其周边区域的图像特征。例如,投影图像特征提取部7在以代表位置为中心而预先设定的大小的矩形区域中提取特征。
[0194]
例如,如图32所示,基准位置确定部8决定将井道分割为每个楼层的数据的位置。例如,基准位置确定部8将层站地坎的上端线作为分割基准边界线。
[0195]
此时,基准位置确定部8对处理对象图像应用水平方向的边缘检测器来检测横向的边缘,通过对边缘图像应用使用了ransac等的水平线模型来提取水平线。
[0196]
基准位置确定部8在投影图像上决定与各个楼层相关的层站地坎的上端线的位
置,之后,转换成xyz坐标系上的信息并决定分割基准位置。例如,层站地坎的上端线在xyz坐标系中成为与zx平面平行的线。层站地坎的上端线的y坐标值固定。此时,如图33所示,基准位置确定部8将层站地坎的上端线的y坐标值作为分割基准坐标。
[0197]
如图34所示,尺寸计算部9基于由基准位置确定部8决定的分割基准位置,将点云数据分割为每个楼层的数据。
[0198]
例如,在某个分割基准位置的y坐标为ys[mm]且预先设定的余量值为γ[mm]的情况下,利用ys γ的y坐标值进行分割即可。
[0199]
在尽量限定处理对象点云的情况下,将某个分割基准位置的y坐标值处于ys γ[mm]至ys γ2[mm]的范围内的点云数据作为相符的楼层的点云数据而切出并进行分割即可。
[0200]
另外,在配置白黑棋格图案这样的标记的情况下,也可以将与同样的模板图像的相关值作为应计算的特征,将通过模板匹配而计算出的结果位置作为分割基准位置。
[0201]
根据以上说明的实施方式2,处理装置1将分割井道时的基准位置确定为三维数据的处理的基准位置。因此,能够准确地分割井道。
[0202]
此外,处理装置1将井道的侧面作为投影方向,根据该三维数据而生成二维的投影图像。因此,能够容易地确定分割井道时的基准位置。
[0203]
此外,处理装置1提取层站地坎的周边的纹理图案作为投影图像的特征。因此,能够准确地分割井道。
[0204]
实施方式3
[0205]
图35是应用实施方式3中的电梯的三维数据的处理装置的处理系统的框图。另外,针对与实施方式1的部分相同或相当的部分标注相同的标号。省略该部分的说明。
[0206]
如图35所示,实施方式3的处理装置1具备平面提取部10和初始排列部11。
[0207]
接着,使用图36对平面提取部10进行说明。
[0208]
图36是用于说明实施方式3中的电梯的三维数据的处理装置的平面提取部的图。
[0209]
如图36所示,平面提取部10从点云数据中提取相互垂直或者最接近垂直的一对平面。平面的提取也可以通过点云处理而求出。例如,在应用了slam的三维计测中得到平面的情况下,也可以使用该平面。
[0210]
此时,不一定需要将全部的点云作为对象来进行处理。例如,也可以将部分的点云作为对象来提取平面。例如,也可以将从点云中心起被预先设定的大小的边界框包围的点云作为处理对象。例如,也可以针对计测点云中进行了噪声去除的点云求出边界框,基于该边界框的大小、主轴的方向,限定处理对象的点云。例如,也可以以预先设定的间隔进行二次抽样,将抽稀后的点云作为处理对象。
[0211]
平面提取部10从提取出的多个平面中决定最接近垂直关系的一对平面。
[0212]
此时,也可以对全部的对进行循环尝试来决定最接近垂直关系的一对平面。也可以在3个平面的组合中决定在彼此的平面角度为从90度起的一定范围内的组合中最垂直的一对平面。
[0213]
接着,使用图37至图48对初始排列部11进行说明。
[0214]
图37至图48是用于说明实施方式3中的电梯的三维数据的处理装置的初始排列部的图。
[0215]
初始排列部11针对点云数据,基于由平面提取部10提取出的一对平面,使点云数据旋转,使得井道的各面与xyz坐标系的各轴方向大致垂直。例如,在点云数据中,目标姿势如图37所示。
[0216]
例如,如图38所示,初始排列部11通过点云数据显示设备而显示点云和一对平面,促使用户经由点云数据显示设备对一对平面赋予井道的面标签中的任意标签。此时,初始排列部11根据赋予到各个平面的标签信息进行姿势转换,使得它们的法线与所希望的轴的方向一致,由此对点云数据进行排列。
[0217]
例如,如图39所示,初始排列部11通过点云数据显示设备向用户显示点云,促使用户选择属于井道的面中的相邻的2个面的点。例如,初始排列部11促使用户选择属于“前表面”和“右表面”的2个点。初始排列部11提取出所指定的2个点附近区域的点云,进行平面拟合,在此基础上,计算指定为“前表面”的点周围的法线作为nf,计算指定为“右表面”的点周围的法线作为nr。此时,预先设定附近区域的大小即可。
[0218]
之后,如图40所示,初始排列部11将一对平面分别设为平面a、平面b。初始排列部11将平面a的法线设为na。初始排列部11将平面b的法线设为nb。初始排列部11在使na和nb与xy坐标轴的任意的方向大致一致的坐标转换中,决定作为nf和n的坐标转换后的法线的nf
′
和nr
′
与z轴-方向(0,0,-1)及x轴正方向(1,0,0)最近的坐标转换。此时,以坐标转换后的法线nf
′
与z轴负方向(0,0,1)的内积以及坐标转换后的法线nr
′
与x轴正方向(0,0,1)的内积成为最小的方式选定坐标转换即可。例如,将坐标转换决定为使双方的内积之和最小即可。
[0219]
例如,如图41所示,初始排列部11在与表示各坐标轴的方向的法线向量的内积成为最小的轴方向上进行搜索。初始排列部11进行坐标转换,使其法线与搜索到的轴一致。
[0220]
例如,针对na进行与匹配到的轴方向一致的转换,之后,针对nb进行转换。
[0221]
另外,要使得一致的轴也可以与一对平面的选定方法无关而设定为同样。
[0222]
例如,在一对平面相当于井道的壁面或底面或以它们为标准的构造的情况下,如图42所示,通过旋转转换,排列后的点云数据与xyz坐标系的关系成为井道的各面与xyz坐标系的各轴的关系接近于垂直的关系。
[0223]
在该情况下,如图43所示,初始排列部11针对坐标转换后的点云数据,进行表示xyz坐标系中的各轴的方向相当于井道的壁面、底面、顶棚中的哪一个方向的标注。例如,初始排列部11将井道的面标签设为“前表面”、“后表面”、“左表面”、“右表面”、“下表面”、“上表面”。
[0224]
例如,如图44所示,初始排列部11与基准直线提取部2同样地制作xyz轴的正方向和负方向上的投影图像。关于投影范围,求出当前阶段的点云数据的外接矩形且将该外接矩形所示的最大和最小的值作为基准即可。
[0225]
例如,外接矩形的计算结果如以下所示。
[0226]
x坐标最大值=1.4[m]
[0227]
x坐标最小值=-1.3[m]
[0228]
y坐标最大值=1.2[m]
[0229]
y坐标最小值=-1.1[m]
[0230]
z坐标最大值=2.0[m]
[0231]
z坐标最小值=-1.5[m]
[0232]
在该情况下,在生成x轴正方向的投影图像时,以下将α1、α2以及α3设为预先设定的常数值而示出投影区域。
[0233]
x坐标的范围:1.4-α1<x<1.4
[0234]
y坐标的范围:-1.0 α2<y<1.2-α2
[0235]
z坐标的范围:-1.5 α3<z<2.0-α3
[0236]
其结果是,如图45所示,作为各轴方向的合计而生成了6个投影图像。此时,各投影图像成为表示井道的各面中的任意面的纹理图案。针对这些投影图像中的1个投影图像,估计该图像属于井道的面中的哪一个面,并且一并估计其朝向,由此,针对xyz坐标轴的各方向进行井道的面的标注。
[0237]
例如,也可以基于从投影图像中得到的图像特征,在图像识别的框架中进行标注。尤其是,前表面的投影图像存在层站门、层站地坎等特征性的纹理图案。因此,作为标注的对象是优选的。在该情况下,如果从若干的图案中将边缘特征、位置不变/比例不变的局部特征作为层站门、层站地坎的种类、尺寸、配置的学习数据来进行学习,则识别处理变得容易。
[0238]
实际上需要考虑投影图像的朝向的不确定性。因此,如图47所示,在一并识别朝向的情况下,例如,使各投影图像分别旋转了
±
90度、180度的图像也作为输入来处理,将24种投影图像作为输入,从其中识别最像“前表面”的图像即可。
[0239]
此外,也可以将投影图像中投影点数极少的投影图像从处理的对象中排除。
[0240]
此外,在井道的底面和顶棚面原本几乎未被计测的点云数据中,被投影到投影图像的点数变少。在该情况下,也可以认为投影图像不可能是“前表面”,从而预先从处理的对象中排除。
[0241]
此外,也可以基于层站门这样的矩形的提取、层站地坎的上端这样的水平线的提取等,解析地进行识别。
[0242]
之后,如图47所示,初始排列部11识别哪一个投影图像为“前表面”,并且识别该识别出的图像相对于原始的投影图像旋转了几度。初始排列部11根据与投影的对应关系,来识别在xyz坐标系中当前前表面位于哪个轴的朝向的方向。此时,联动地自动决定左右表面、下表面、上表面对应于哪个轴方向。
[0243]
其结果是,如图48所示,初始排列部11掌握针对当前点云的井道的面的标签与xyz轴的方向之间的关系。初始排列部11将从该对应关系向所希望的对应关系的坐标转换作为轴的改换来处理,由此对点云数据进行排列。
[0244]
另外,在实施方式3中,基准直线提取部2从由初始排列部11排列后的点云数据中提取基准直线。
[0245]
根据以上说明的实施方式3,处理装置1从井道的三维数据中提取相互垂直的一对平面。处理装置1按照该一对平面对井道的三维数据进行排列。因此,与三维输入部的计测时的姿势无关地,能够对井道的三维数据进行排列。
[0246]
另外,在基准平面提取部4中先提取基准平面的情况下,在基准平面提取部4中,从初始排列部11排列后的三维数据中提取井道的基准平面即可。
[0247]
产业可利用性
[0248]
如以上那样,本公开的电梯的三维数据的处理装置能够用于对数据进行处理的系统。
[0249]
附图标记说明
[0250]
1处理装置,2基准直线提取部,3第1排列部,4基准平面提取部,5第2排列部,6投影图像生成部,7投影图像特征提取部,8基准位置确定部,9尺寸计算部,10平面提取部,11初始排列部,100a处理器,100b存储器,200硬件。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。