1.本公开涉及对车载的蓄电装置进行充电的可动式的充电设备的控制。
背景技术:
2.用于对搭载于车辆等的蓄电装置进行充电的充电设备设置于车辆等的外部的停车场、人行道,不过由于占据设置空间而有时成为步行、车辆的行驶的阻碍。因此,公知一种使充电设备为可动式,例如收纳于地面下的技术。
3.例如,在日本特开2011-109807中,公开了一种充电用桩,该充电用桩被设置为能够以能够成为从地面立起的状态,并且成为收纳于地面下的状态的方式进行升降。充电用桩具备插座,在用户对搭载于车辆的蓄电装置进行充电的情况下,将充电线缆的端部的插头连接于该插座。
技术实现要素:
4.另外,作为车辆与能够在地面下收纳的充电设备之间的连接方式,并不限于上述的日本特开2011-109807中记载的方式。作为车辆与充电设备之间的其他的连接方式,例如也可考虑在车辆驻车于在地面下收纳的充电设备的正上方的状态下,充电设备的连接器上升并与在车辆的下部设置的充电口连接的方式。这种连接方式的充电设备能够在车辆驻车于规定的驻车位置的状态下利用。
5.然而,例如在预约了充电设备的利用等的作为充电设备的利用对象的车辆移动到规定的驻车位置之前,不是充电设备的利用对象的车辆驻车于规定的驻车位置时,利用对象的车辆无法移动到驻车位置,有可能无法对在利用对象的车辆中搭载的蓄电装置进行充电。因此,用户的便利性有可能受损。
6.本公开是为了解决上述课题而完成的,其目的是提供一种抑制用户的便利性的恶化的充电设备以及充电设备的控制方法。
7.本公开的某一方案的充电设备是设置于在地面下形成的凹部并能够进行搭载于车辆的蓄电装置的充电的可动式的充电设备。在车辆的下部设有用于蓄电装置的充电的充电口。该充电设备具备:可动部,具有连接器,该连接器构成为能够与驻车于规定位置的车辆的充电口连接;升降装置,使可动部在包括第一位置和第二位置的可动范围内升降,该第一位置是连接器收纳在地面下的位置,该第二位置是连接器与地面上的充电口连接的位置;以及控制装置,对升降装置的动作进行控制。控制装置在不是充电设备的利用对象的非对象车辆接近充电设备的情况下,使可动部从第一位置上升。
8.这样的话,在不是充电设备的利用对象的非对象车辆接近充电设备的情况下,可动部从第一位置上升,因此能够抑制非对象车辆驻车于规定位置。因此,能够避免成为作为充电设备的利用对象的车辆无法驻车的状况,因此能够抑制用户的便利性的恶化。
9.在某一实施方式中,控制装置在作为充电设备的利用对象的对象车辆接近充电设备的情况下,在对象车辆驻车于规定位置时使可动部从第一位置上升到第二位置。
10.这样的话,在作为充电设备的利用对象的对象车辆接近充电设备的情况下,在对象车辆驻车于规定位置时可动部从第一位置上升到第二位置,因此通过连接器与充电口连接而能够对搭载于对象车辆的蓄电装置进行充电。
11.在又一实施方式中,控制装置在非对象车辆通过了充电设备的情况下,使可动部下降到第一位置。
12.这样的话,在非对象车辆通过了充电设备的情况下,可动部被下降到第一位置,因此之后对象车辆能够驻车于规定位置。
13.在又一实施方式中,控制装置在非对象车辆接近充电设备的情况下,使可动部上升至妨碍向规定位置驻车的高度。
14.这样的话,在不是充电设备的利用对象的非对象车辆接近充电设备的情况下,可动部从第一位置上升至妨碍向规定位置的驻车的高度,因此能够抑制非对象车辆驻车于规定位置。
15.本公开的另一方案的充电设备的控制方法是设置于在地面下形成的凹部并能够进行搭载于车辆的蓄电装置的充电的可动式的充电设备的控制方法。在车辆的下部设有用于蓄电装置的充电的充电口。充电设备具备:可动部,具有连接器,该连接器构成为能够与驻车于规定位置的车辆的充电口连接;以及升降装置,使可动部在包括第一位置和第二位置的可动范围内升降,该第一位置是连接器收纳在地面下的位置,该第二位置是连接器与地面上的充电口连接的位置。该控制方法包括:判定不是充电设备的利用对象的非对象车辆是否接近充电设备的步骤;以及在非对象车辆接近充电设备的情况下使可动部从第一位置上升的步骤。
16.根据本公开,能够提供一种抑制用户的便利性的恶化的充电设备以及充电设备的控制方法。
附图说明
17.下面将参照附图来描述本发明的示例性的实施方式的特征、优点、技术及工业重要性,其中相同的附图标记表示相同的元素,并且其中:
18.图1是表示本实施方式的充电设备的结构的一例的图。
19.图2是表示可动部上升后的状态的图。
20.图3是用于对充电设备中进行的通信进行说明的图。
21.图4是表示由充电设备的控制装置执行的处理的一例的流程图。
22.图5是用于说明充电设备的控制装置的动作的一例的图。
23.图6是用于说明充电设备的控制装置的动作的另一例的图。
具体实施方式
24.以下,关于本公开的实施方式,参照附图详细地进行说明。图中,对于相同或相当的部分标注相同的标号而不重复其说明。
25.图1是表示本实施方式的充电设备300的结构的一例的图。如图1所示,充电设备300是构成为能够收纳在地面f1下的可动式的充电设备。图1所示的充电设备300的状态是充电设备300收纳在地面f1下的状态(以下也称为“收纳状态”)。
26.充电设备300设置于从地面f1向下方延伸的凹部r1。在收纳状态下,在凹部r1的内侧收纳充电设备300的整体。充电设备300具有圆筒状的壳体。充电设备300的壳体固定于凹部r1的底面。壳体的材料既可以为金属,也可以为塑料。也可以对壳体的表面实施防水处理。
27.充电设备300在壳体内具有电源电路310、致动器320和控制装置330。并且,充电设备300还具备能够沿铅垂方向(上下方向)位移的可动部301。可动部301是在前端具有连接器301a的棒状部件。致动器320相当于使可动部301升降的升降装置。在收纳状态下,可动部301的整体收纳在充电设备300的壳体内,充电设备300的顶面与地面f1处于同一面。也可以在充电设备300的壳体的外周面与凹部r1的内壁之间的间隙设置密封部件。
28.可动部301的连接器301a经由未图示的电线与电源电路310连接。可动部301可以除了与电源电路310连接的电力线以外,还包括与控制装置330连接的通信线。电源电路310构成为从交流电源350接受电力的供给并向可动部301(更具体而言是连接器301a)供给电力。电源电路310包括电力转换电路,作为充电设备侧的充电器起作用。交流电源350向电源电路310供给交流电力。交流电源350也可以为商用电源(例如由电力公司提供的电力系统)。电源电路310由控制装置330控制。
29.致动器320构成为直接地或间接地向可动部301施加动力而使可动部301沿铅垂方向移动。致动器320也可以为使用从电源电路310供给的电力来产生动力的电动致动器。可动部301的位移机构也可以为齿轮齿条式。例如,可以构成为在可动部301固定齿条,致动器320驱动与齿条啮合的小齿轮旋转。或者,也可以构成为与活塞连接的杆固定于可动部301,致动器320利用液压使活塞移动。或者,致动器320也可以使用电力来产生磁力而利用磁力直接地向可动部301施加动力。致动器320由控制装置330控制。
30.控制装置330可以为计算机。控制装置330构成为包括处理器331、ram(random access memory:随机存取存储器)332以及存储装置333。作为处理器331,可采用例如cpu(central processing unit:中央处理器)。存储装置333构成为能够保存储存的信息。在存储装置333中除了程序以外还存储了程序中使用的信息(例如映射、数学式以及各种参数)。在该实施方式中,通过处理器331执行存储装置333中存储的程序来执行充电设备300中的各种控制。不过,充电设备300中的各种控制并不限于基于软件的执行,也能够用专用的硬件(电子电路)来执行。需要说明的是,控制装置330具备的处理器的数目是任意的,可以对每个规定的控制准备处理器。
31.充电设备300与车辆的连接方式是在车辆200驻车于在地面f1下收纳的可动部301的正上方的状态下可动部301的连接器301a从车辆200的地板下方朝向车辆200上升并与在车辆200的下部设置的充电口211连接的方式。可动部301的连接器301a构成为能够与在驻车于规定的驻车位置的车辆200的下部设置的充电口211连接。通过该实施方式的充电设备300向车辆200供给电力的位置是俯视下连接器301a和车辆200的充电口211一致的位置(即连接器301a以及充电口211各自的x、y坐标一致的位置)。可动部301构成为在包括第一位置和第二位置的可动范围内进行位移,该第一位置是连接器301a收纳在地面f1下的位置,该第二位置是连接器301a与地面f1上的车辆200的充电口211连接的位置。
32.图2是表示可动部301上升后的状态的图。参照图2,可动部301以改变连接器301a的位置zx的方式沿铅垂方向位移(上升以及下降)。图2所示的充电设备300的状态是连接器
301a上升至与车辆200的充电口211连接的位置(第二位置)的状态(以下也称为“上升状态”)。以下,为了说明的方便,将可动部301的连接器301a的位置zx视为可动部301的位置。
33.可动部301构成为在可动范围r2内进行位移。可动范围r2的下限位置z1是与地面f1相同的高度。在可动部301的位置为下限位置z1时,可动部301的整体(包括连接器301a)收纳在地面f1下(参照图1)。若可动部301的位置比下限位置z1高,则连接器301a露出到地面f1上。可动范围r2的上限位置z2相对于车辆200的充电口211的高度而设定为足够高的位置。可动范围r2包括连接器301a收纳在地面下的第一位置(例如下限位置z1)和连接器301a与地面上的车辆200的充电口211连接的第二位置(例如图2所示的位置zx)。在该实施方式中,下限位置z1是与地面f1相同的位置,不过下限位置z1也可以设定为比地面f1靠下的位置。
34.图3是用于对充电设备300中进行的通信进行说明的图。如图3所示,充电设备300还具备驻车传感器302和通信装置303。
35.驻车传感器302是取得表示车辆200的充电口211与连接器301a的相对的位置关系(例如位置偏移的方向以及距离)的位置偏移信息的传感器。驻车传感器302也可以例如通过识别在车辆200的充电口211附近设置的标记m来取得上述位置偏移信息。驻车传感器302可以包括激光器以及相机中的至少一个。驻车传感器302的检测结果向控制装置330输出。控制装置330能够使用驻车传感器302的检测结果来判断车辆200是否驻车于规定的驻车位置。控制装置330可以在例如车辆200的静止状态从驻车传感器302检测到车辆200停止于规定的驻车位置之后持续至经过规定时间的情况下,判断为车辆200驻车于规定的驻车位置。
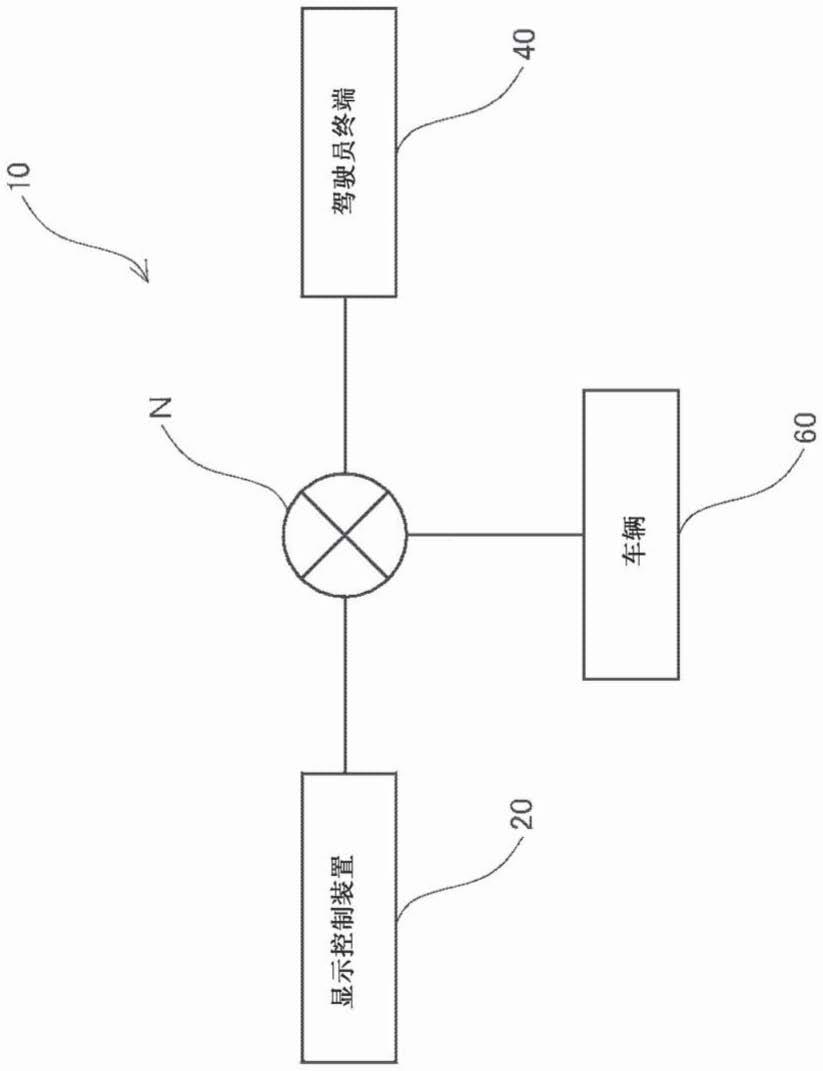
36.通信装置303构成为能够与服务器600以及便携终端100分别进行无线通信。通信装置303将从充电设备300的外部接收的信息向控制装置330传递。控制装置330通过通信装置303将充电设备300的状态向服务器600依次发送。
37.便携终端100相当于车辆200的用户携带的便携终端。便携终端100内置计算机。在该实施方式中,作为便携终端100,采用具备触摸面板显示器的智能手机。不过,并不限于此,作为便携终端100,能够采用任意的便携终端,也能够采用平板终端、可穿戴设备(例如智能手表)或电子密钥等。
38.便携终端100构成为能够与充电设备300以及服务器600分别进行无线通信。在便携终端100中安装有规定的应用软件(以下简称为“应用”)。便携终端100由车辆200的用户携带,能够通过上述应用与充电设备300以及服务器600分别进行信息的收发。用户例如通过便携终端100的触摸面板显示器而能够操作上述应用。并且,便携终端100的触摸面板显示器构成为能够向车辆200的用户通知信息。
39.在该实施方式中,在用户启动便携终端100的上述应用并使对于服务器600的用户认证成功时,用户能够在应用上进行预约目的地周边的充电设备300的利用的操作。在该实施方式中,便携终端100构成为根据来自用户的请求而向服务器600发送关于期望的时段以及目的地的信息。用户能够通过触摸面板显示器而向便携终端100输入关于期望预约的时段以及目的地的信息。
40.在由用户进行了预约用户所期望的时段内的目的地周边的充电设备300的利用的操作时,服务器600将目的地周边的多个充电设备中的任一个充电设备300设定为预约对象的充电设备。
41.图1~图3所示的车辆200是具备蓄电池210、用于使用蓄电池210中储存的电力来进行行驶的设备(例如后述的电动发电机221以及变换器222)、用于利用充电设备300来对蓄电池210进行充电的设备(例如后述的充电口211以及充电器212)的电动车辆。该实施方式的车辆200是不具备发动机(内燃机)的电动汽车(ev)。
42.车辆200还具备电子控制装置(以下称为“ecu(electronic control unit)”)230以及通信设备240。ecu230可以为计算机。ecu230具备处理器、ram以及存储装置(均未图示)。通过处理器执行存储装置中存储的程序来执行各种车辆控制。不过,车辆控制并不限于基于软件的执行,也能够用专用的硬件(电子电路)来执行。
43.ecu230构成为通过通信设备240而与车辆200的外部进行通信。通信设备240构成为包括各种通信i/f(接口)。通信设备240可以包括用于与服务器600(图3)进行无线通信的通信i/f。并且,搭载于车辆200的通信设备240和便携终端100构成为彼此进行无线通信。ecu230能够通过无线通信来控制便携终端100并使便携终端100进行对于用户的通知。通信设备240与便携终端100之间的通信也可以为近距离通信(例如车内以及车辆周边的范围内的直接通信)。
44.蓄电池210构成为包括例如锂离子电池或镍氢电池那样的二次电池。二次电池既可以为组电池,也可以为全固体电池。需要说明的是,也可以取代二次电池而采用双电层电容器那样的其他蓄电装置。
45.车辆200还具备对蓄电池210的状态进行监视的监视模块210a。监视模块210a包括对蓄电池210的状态(例如电压、电流以及温度)进行检测的各种传感器,将检测结果向ecu230输出。监视模块210a也可以为除了上述传感器功能以外,还具有soc(state of charge:充电状态)推定功能、soh(state of health:健康状况)推定功能、单电池电压的均等化功能、诊断功能以及通信功能的bms(battery management system:电池管理系统)。ecu230能够基于监视模块210a的输出来取得蓄电池210的状态(例如温度、电流、电压、soc以及内部电阻)。
46.车辆200具备用于电动行驶的电动发电机(以下称为“mg”)221以及变换器(以下称为“inv”)222。mg221例如为三相交流电动发电机。mg221构成为由inv222驱动,使车辆200的驱动轮w旋转。inv222由ecu230控制。inv222使用从蓄电池210供给的电力来驱动mg221。并且,mg221进行再生发电,将发电的电力经由inv222向蓄电池210供给。需要说明的是,车辆200的驱动方式并不限于图1~图3所示的前轮驱动,也可以为后轮驱动或四轮驱动。
47.车辆200构成为能够自动驾驶。车辆200还具备自动驾驶传感器250。自动驾驶传感器250是使用于自动驾驶的传感器。不过,自动驾驶传感器250也可以在没有执行自动驾驶时在规定的控制中使用。
48.自动驾驶传感器250包括取得用于对车辆200的外部环境进行识别的信息的传感器和取得与车辆200的位置以及姿态有关的信息的传感器。自动驾驶传感器250可以包括例如相机、毫米波雷达以及激光雷达中的至少一个。自动驾驶传感器250也可以包括例如imu(inertial measurement unit:惯性测量单元)以及gps(global positioning system:全球定位系统)传感器中的至少一个。ecu230构成为使用由自动驾驶传感器250取得的各种信息来控制车辆200的加速器装置、制动器装置以及转向装置(均未图示),由此执行车辆200的自动驾驶。
49.车辆200具备用于接触充电的充电口211以及充电器212。充电口211设于车辆200的下部(例如地板面板附近)。在充电口211附近设有位置检测用的标记m。并且,虽然省略了图示,但是车辆200具备对充电口211的连接状态进行检测的电路(例如检测在充电口211是否连接有连接器301a的电路)。
50.充电口211构成为充电设备300的连接器301a能够连接。在充电口211以及连接器301a两者中内置有触点,在连接器301a与充电口211连接时,触点彼此接触而充电口211与连接器301a电连接。以下,将连接器301a与充电口211连接的状态(即充电设备300和车辆200电连接的状态)称为“插入状态”。并且,将连接器301a没有与充电口211连接的状态(即充电设备300和车辆200没有电连接的状态)称为“拔出状态”。
51.充电器212具备电力转换电路(未图示)。电力转换电路将从车辆外部向充电口211供给的电力转换成适合于蓄电池210的充电的电力。充电器212在例如从充电口211供给交流电力的情况下,将被供给的交流电力转换成直流电力并向蓄电池210供给。充电器212由ecu230控制。
52.图1所示的服务器600构成为包括控制装置、存储装置和通信装置(均未图示)。服务器600可以为计算机。控制装置构成为包括处理器并进行规定的信息处理。存储装置构成为能够保存各种信息。通信装置包括各种通信i/f。在服务器600中,控制装置构成为通过通信装置与外部进行通信。服务器600构成为能够与便携终端100以及充电设备300分别进行通信。并且,服务器600也可以构成为在蓄电池210的充电中经由充电设备300与车辆200进行通信。
53.在服务器600中登记了多个车辆(包括车辆200)、多个用户(包括车辆200的用户)和多个充电设备(包括充电设备300)。并且,用户终端(包括便携终端100)也与用户一起登记于服务器600。服务器600构成为对登记的各用户的信息(以下也称为“用户信息”)、登记的各车辆的信息(以下也称为“车辆信息”)和登记的各充电设备的信息(以下也称为“充电设备信息”)进行管理。与用户终端有关的信息包含于用户信息以及车辆信息中的至少一个。用户信息、车辆信息以及充电设备信息存储于服务器600的存储装置。
54.用于识别用户的识别信息(用户id)被赋予每个用户,服务器600用用户id来区别用户信息并进行管理。用户id也作为识别用户终端的信息(终端id)起作用。用户信息中包含例如用户携带的便携终端的通信地址以及位置信息、对归属于用户的车辆进行识别的信息(车辆id)。并且,用于识别车辆的识别信息(车辆id)被赋予每个车辆,服务器600用车辆id来区别车辆信息并进行管理。车辆信息中包含例如车辆的规格(例如与充电有关的规格)和服务器600从用户终端接收的信息(例如车辆的行驶计划)。而且,用于识别充电设备的识别信息(evse-id)被赋予每个充电设备,服务器600用evse-id来区别充电设备信息并进行管理。充电设备信息中包含充电设备的位置、充电设备的连接状态(插入状态/拔出状态)、插入状态的充电设备与车辆的组合(车辆id以及evse-id)、evse的供电状态(供电中/供电停止)。
55.在具有以上那样的结构的充电设备300的非使用时,由于处于收纳状态(例如图1所示的状态),因此即使充电设备300设置在街上,也能够避免破坏景观。
56.这样的充电设备300的利用例如能够通过事先使用上述的便携终端100等来事先预约好并使车辆200移动到用户预约的充电设备300的规定的驻车位置而进行。
57.例如,在如上述那样在应用上进行预约用户期望的时段内的目的地周边的充电设备300的利用的操作时,服务器600将目的地周边的多个充电设备中的在用户期望的时段内能够接受预约(没有其他的预约)的任一个充电设备300设定为预约对象的充电设备。服务器600将关于期望的时段的预约信息、用户id、作为充电设备300的利用对象的车辆200(以下记载为对象车辆)的车辆id发送到被设定为预约对象的充电设备300。并且,服务器600将预约信息与用户id与车辆id与evse-id建立对应地存储于存储装置。
58.用户使对象车辆移动到预约对象的充电设备300的规定的驻车位置。此时,用户既可以通过自动驾驶(自动驻车)来使对象车辆移动到规定的驻车位置,也可以通过手动驾驶(用户自己的驾驶)来使对象车辆移动到规定的驻车位置。对象车辆的ecu230例如按每规定时间将在移动中由自动驾驶传感器250取得的对象车辆的位置信息经由服务器600发送到被设定为预约对象的充电设备300。
59.被设定为预约对象的充电设备300的控制装置330在用户期望的时段内对象车辆驻车于规定的驻车位置的情况下,使致动器320进行动作而使可动部301上升至处于第二位置为止。此时,控制装置330例如从对象车辆取得车辆id,在取得的车辆id和从服务器600接收的车辆id一致的情况下使可动部301上升。
60.通过控制装置330而可动部301上升到第二位置时,连接器301a与对象车辆的充电口211连接,变成插入状态。控制装置330使电源电路310进行动作,将交流电力向对象车辆供给。在对象车辆中,使用被供给的交流电力来对车载的蓄电池210进行充电。
61.然而,例如在对象车辆移动到规定的驻车位置之前,若不是被设定为预约对象的充电设备300的利用对象的车辆(以下记载为非对象车辆)驻车于规定的驻车位置,则对象车辆无法移动到驻车位置,有可能无法对搭载于对象车辆的蓄电池210进行充电。因此,用户的便利性有可能受损。
62.因此,在本实施方式中,充电设备300的控制装置330在非对象车辆接近充电设备300的情况下,使可动部301从第一位置上升。
63.这样的话,能够抑制非对象车辆驻车于规定的驻车位置。因此,能够避免变成对象车辆无法驻车于规定的驻车位置的状况,因此能够抑制用户的便利性的恶化。
64.以下,使用图4对由充电设备300的控制装置330执行的处理的一例进行说明。图4是表示由充电设备300的控制装置330执行的处理的一例的流程图。
65.在步骤(以下将步骤记载为s)100中,控制装置330判定车辆是否向充电设备300接近。控制装置330例如可以使用由对充电设备300的周围进行拍摄的相机拍摄的图像来判定车辆是否向充电设备300接近。控制装置330例如可以在对拍摄的图像进行解析而图像包含移动中的车辆的图像的情况下判定为车辆向充电设备300接近。关于基于图像解析的车辆的图像的提取,使用公知的技术即可,不进行其详细的说明。相机可以设置于充电设备300的外部,或者也可以设置于充电设备300的上端。在判定为车辆接近的情况下(在s100中为是),处理移到s102。
66.在s102中,控制装置330判定接近车辆是否为非对象车辆。控制装置330例如可以在无法从接近车辆取得车辆id的情况下判定为接近车辆是非对象车辆。或者,控制装置330例如也可以在从接近车辆取得的车辆id与从服务器600作为进行了利用充电设备300的预约的车辆而接收的车辆id不同的情况下,判定为接近车辆是非对象车辆。或者,控制装置
330例如在对象车辆的位置和接近的车辆的位置不一致的情况下判定为非对象车辆。控制装置330例如也可以在经由服务器600接收的对象车辆的位置与接近的车辆的位置之间的距离大于阈值的情况下,判定为对象车辆的位置和接近的车辆的位置不一致。或者,控制装置330也可以在经由服务器600接收的对象车辆的位置与充电设备300之间的第一距离和接近的车辆与充电设备300之间的第二距离之差大于阈值的情况下,判定为对象车辆的位置和接近的车辆的位置不一致。在判定为接近车辆是非对象车辆的情况下(在s102中为是),处理移到s104。
67.在s104中,控制装置330使可动部301从第一位置上升。控制装置330例如使可动部301从第一位置上升至规定的位置。规定的位置例如为与妨碍向充电设备300的规定的驻车位置的驻车的高度相当的位置。
68.在s106中,控制装置330判定接近车辆是否已通过充电设备300。控制装置330例如使用由对充电设备300的周围进行拍摄的相机拍摄的图像来判定接近车辆是否已通过。控制装置330例如可以在拍摄的图像中未包含与接近车辆相当的图像的情况下,判定为接近车辆已通过。在判定为接近车辆通过了充电设备300的情况下(在s106中为是),处理移到s108。
69.在s108中,控制装置330使可动部301下降至第一位置。即,控制装置330以可动部301位移到第一位置的方式对致动器320进行控制。更具体而言,控制装置330使可动部301下降至可动范围r2的下限位置z1。需要说明的是,在判定为车辆没有接近的情况下(在s100中为否),该处理结束。并且,在判定为接近车辆不是非对象车辆的情况下(在s102中为否),处理移到s110。并且,在判定为接近车辆未通过的情况下(在s106中为否),该处理返回到s106。
70.在s110中,控制装置330判定对象车辆是否已移动到规定的驻车位置。控制装置330例如上述那样使用驻车传感器302的检测结果来判定对象车辆是否已驻车于规定的驻车位置。或者,控制装置330也可以在对象车辆的位置与规定的驻车位置之间的距离小于阈值的情况下判定为对象车辆已移动到规定的驻车位置。控制装置330可以经由服务器600取得对象车辆的位置信息,或者也可以从对象车辆直接取得位置信息。在判定为对象车辆已移动到规定的驻车位置的情况下(在s110中为是),处理移到s112。需要说明的是,在判定为对象车辆未移动到规定的驻车位置的情况下(在s110中为否),处理返回到s110。
71.在s112中,控制装置330以可动部301从第一位置位移到第二位置的方式对致动器320进行控制。由此,可动部301的连接器301a从对象车辆的地板下方朝向对象车辆的充电口211上升并与在对象车辆的下部设置的充电口211连接。通过该处理,充电设备300变成上升状态(例如图2所示的状态)。并且,对象车辆以及充电设备300变成插入状态。在插入状态下,能够进行对象车辆与充电设备300之间的电力的授受。
72.在s114中,控制装置330执行充电。即,控制装置330以执行从充电设备300向对象车辆的电力供给(供电)的方式对电源电路310进行控制。通过该处理,开始对于对象车辆的供电,开始车载的蓄电池210的充电。
73.更具体而言,充电设备300的电源电路310将从交流电源350供给的交流电力转换(例如变压)成适合于对于对象车辆的供电的交流电力,将转换后的电力向连接器301a供给。在插入状态下,从电源电路310向连接器301a供给的电力被输入到对象车辆的充电口
211。输入到充电口211的电力经由充电器212向蓄电池210供给。在蓄电池210的充电中,控制装置330对电源电路310进行控制以调整向对象车辆供给的电力,并且ecu230对充电器212进行控制以调整充电电力。如此进行搭载于对象车辆的蓄电池210的充电。
74.在s116中,控制装置330判定搭载于对象车辆的蓄电池210的充电是否已完成。控制装置330例如在从对象车辆接收到表示电力供给的停止请求的信息的情况下判定为搭载于对象车辆的蓄电池210的充电已完成。或者,控制装置330例如也可以在接收到来自便携终端100的表示电力供给的停止请求的信息的情况下判定为蓄电池210的充电已完成。在判定为搭载于对象车辆的蓄电池210的充电已完成的情况下(在s116中为是),处理移到s118。需要说明的是,在判定为搭载于对象车辆的蓄电池210的充电未完成的情况下(在s116中为否),处理返回到s116。
75.在s118中,控制装置330使充电停止。具体而言,控制装置330以向对象车辆的电力的供给被停止的方式对电源电路310进行控制。控制装置330然后使处理移到s108。
76.关于基于以上那样的构造以及流程图的充电设备300的控制装置330的动作,参照图5以及图6进行说明。图5是用于说明充电设备300的控制装置330的动作的一例的图。图6是用于说明充电设备300的控制装置330的动作的另一例的图。
77.参照图5以及图6,在该例中,在停车场内多个驻车空间801、802、803被分隔线l划分成纵向排列(纵列)。在驻车空间801、802、803中,仅在驻车空间802设有充电设备300。人行道900与驻车空间801、802、803相邻。人行道900沿着各驻车空间的长度方向设置。
78.例如,设想非对象车辆接近的情况。在图5的实线框示出了非对象车辆200a接近充电设备300的状态。在图5的虚线框示出了非对象车辆200a通过了充电设备300的状态。
79.如图5的实线框所示,在车辆接近(在s100中为是)且接近车辆是非对象车辆200a的情况下(在s102中为是),可动部301被上升至妨碍驻车的高度(s104)。因此,抑制非对象车辆驻车于设置有充电设备300的驻车空间802。
80.并且,如图5的虚线框所示,在非对象车辆200a通过充电设备300的情况下(在s106中为是),以可动部301位移至第一位置的方式对致动器320进行控制。由此,可动部301被下降至可动范围r2的下限位置z1(s108)。因此,之后能够进行作为充电设备300的利用对象的对象车辆向驻车空间802的驻车。
81.接下来,设想对象车辆接近的情况。在图6的实线框示出了对象车辆200b接近充电设备300的状态。在图6的虚线框示出了对象车辆200b驻车于驻车空间802的规定的驻车位置的状态。
82.如图6的实线框所示,在车辆接近(在s100中为是)且接近车辆是对象车辆200b(不是非对象车辆)的情况下(在s102中为否),可动部301的上升待机至对象车辆200b移动到规定的驻车位置为止(在s110中为否)。并且,如图6的虚线框所示,在对象车辆200b移动到规定的驻车位置时(在s110中为是),可动部301被上升至第二位置(s112)。在可动部301被上升至第二位置而连接器301a与对象车辆200b的下部的充电口连接时,执行充电(s114)。在搭载于对象车辆200b的蓄电池210变成充满电状态等而从对象车辆200b接收到表示电力供给的停止请求的信息时,判定为充电已完成(在s116中为是),以电力供给停止的方式对电源电路310进行控制,由此充电被停止(s118)。
83.然后,以可动部301从第二位置位移到第一位置的方式对致动器320进行控制。由
此,可动部301被下降至可动范围r2的下限位置z1(s108)。因此,可动部301的连接器301a从对象车辆200b的充电口离开,对象车辆200b以及充电设备300变成拔出状态。并且,在可动部301的位置变成下限位置z1时,地面f1和可动部301的连接器301a处于同一面。如此,充电设备300再次成为收纳状态(例如图1所示的状态)。
84.如上所述,根据本实施方式的充电设备300,在不能够进行充电设备300的利用(即没有进行利用的预约)的非对象车辆接近充电设备300的情况下,可动部301从第一位置上升至妨碍车辆向规定的驻车位置的移动的高度,因此能够抑制非对象车辆驻车于规定的驻车位置。因此,能够避免变成对象车辆无法驻车于规定的驻车位置的状况,因此能够抑制用户的便利性的恶化。因此,能够提供一种抑制用户的便利性的恶化的充电设备以及充电设备的控制方法。
85.而且,在非对象车辆通过了充电设备300的情况下,可动部301被下降到第一位置,因此之后能够利用充电设备300(即进行了利用的预约)的对象车辆能够驻车于规定位置。并且,在对象车辆接近充电设备300的情况下,在对象车辆驻车于规定位置时,可动部301从第一位置上升到第二位置,因此连接器301a与充电口211连接,由此能够对搭载于对象车辆的蓄电池210进行充电。
86.以下,对变形例进行记载。
87.在上述的实施方式中,说明了从充电设备300对车辆200供给交流电力的方式,不过也可以从充电设备300对车辆200供给直流电力。在该情况下,车辆200例如也可以为省略了充电器212的结构。
88.而且,在上述的实施方式中,将充电设备300的壳体具有圆筒形状的情况作为一例进行了说明,不过特别的是只要为能够进行升降动作的形状即可,并不特别限定于圆筒形状。例如,充电设备300的壳体也可以具有长方体形状。
89.而且,在上述的实施方式中,充电设备300以图1~图3所示的结构为一例来进行了说明,不过充电设备300的壳体的形状以及尺寸等能够适当变更。并且,可动部的形状以及尺寸等也能够适当变更。
90.而且,在上述的实施方式中,车辆200以图1~图3所示的结构为一例来进行了说明,不过车辆200并不限于ev,也可以为phv(插入式混合动力车辆)。并且,车辆200并不限于轿车,也可以为公共汽车或卡车。车辆200也可以具备飞行功能。车辆200也可以为能够以无人的方式行驶的车辆(例如无人搬运车(agv)或农业机械)。
91.而且,在上述的实施方式中,说明了充电设备300在非对象车辆接近的情况下上升至妨碍车辆向规定的驻车位置的移动的高度的方式,不过也可以上升至与至少非对象车辆的驾驶员能够认识到连接器301a上升了的高度相当的位置。通过非对象车辆的驾驶员认识到连接器301a的上升,能够抑制非对象车辆向规定的驻车位置的移动。
92.而且,在上述的实施方式中,说明了充电设备300使用由对充电设备300的周围进行拍摄的相机拍摄的图像来判定车辆是否向充电设备300接近的方式,不过例如在充电设备300的驻车空间设置于能够进行多台车辆的驻车的停车场的情况下,也可以使用对停车场的出入口进行拍摄的图像来判定车辆是否向充电设备300接近。
93.控制装置330例如也可以在对拍摄的图像进行解析而图像中包含向停车场入库的车辆的图像的情况下判定为车辆向充电设备300接近。
94.而且,在上述的实施方式中,说明了充电设备300使用由对充电设备300的周围进行拍摄的相机拍摄的图像来判定车辆是否向充电设备300接近的方式,不过也可以使用在驻车空间的周围的车道的规定位置(道路表面、道路上、道路的侧壁等)设置的接近传感器的检测结果来判定车辆是否向充电设备300接近。
95.而且,在上述的实施方式中,说明了充电设备300使用由对充电设备300的周围进行拍摄的相机拍摄的图像来判定车辆是否向充电设备300接近的方式,不过也可以通过从服务器600接收接近充电设备300的车辆的信息来判定车辆是否向充电设备300接近。
96.而且,在上述的实施方式中,说明了控制装置330在对象车辆的位置和接近的车辆的位置不一致的情况下判定为是非对象车辆的方式,不过例如控制装置330也可以在能够从服务器600取得关于对象车辆的图像信息的情况下,对由相机拍摄的图像进行解析,在拍摄的图像中未包含关于对象车辆的图像的情况下判定为接近车辆是非对象车辆。
97.而且,在上述的实施方式中,说明了根据利用的预约的有无来判定是对象车辆还是非对象车辆的方式,不过也可以根据是否在服务器600中登记为能够利用的车辆(即是否为服务器600中存储的车辆id)来判定是对象车辆还是非对象车辆。
98.而且,在上述的实施方式中,作为充电设备300与车辆200之间的连接方式,以在车辆200驻车于在地面下收纳的可动部301的正上方的状态下可动部301的连接器301a从车辆200的地板下方朝向车辆200上升并与在车辆200的下部设置的充电口211连接的方式为一例来进行了说明,不过并不限定于这种连接方式,也可以为以下那样的连接方式。例如,充电设备300可以设置成在第一位置处可动部301处于不是车辆200的正下方的位置。并且,在可动部301从第一位置向第二位置位移(上升)时,也可以朝向车辆200的正下方的空间向斜上方位移。此时,在可动部301位移到第二位置时,可动部301的连接器301a与车辆200的充电口211连接。
99.需要说明的是,上述的变形例也可以将全部或一部分适当组合来实施。
100.本次公开的实施方式应该认为全部的点都是示例,并不是限制性的内容。本发明的范围不是由上述的实施方式的说明,而是由发明请求保护的范围表示,旨在包含与发明请求保护的范围均等的意义以及范围内的全部的变更。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。