1.本发明涉及磁浮列车悬浮系统控制技术领域,尤其涉及基于广义内模控制算法的磁浮列车悬浮系统的控制方法。
背景技术:
2.磁浮列车由于其自身具有的无摩擦、低噪音、转弯半径小、爬坡能力强等优势而被广泛关注。目前,无论是既有线路的维护升级,还是新工程的建设,保证磁浮列车的平稳运行一直是研究人员和工程师们最关心的问题。磁浮列车的悬浮系统是一个复杂的非线性系统,很难对其进行精确建模。通常情况下,标称悬浮力会通过泰勒公式在平衡点处进行线性化近似。这样会导致标称悬浮力与近似悬浮力之间存在误差。此外,当悬浮系统偏离平衡点时,基于近似悬浮力公式所设计的控制器通常不能及时地对系统进行调节,从而导致系统性能的下降。因此,需要对悬浮力进行更精确的计算。这不仅有利于加深对系统的了解,而且能够为控制器的设计提供帮助。
3.作为一个自不稳定系统,磁浮列车的悬浮系统需要被施加主动控制才能保持稳定。目前普遍使用的pid反馈控制器是保证悬浮系统稳定的基石。但其缺点在于无法在扰动较大时进行有效调节,并且难以保证高精度下的鲁棒性。
技术实现要素:
4.本发明针对现有技术中的缺点,提供了一种基于广义内模控制算法的磁浮列车悬浮系统的控制方法。
5.为了解决上述技术问题,本发明通过下述技术方案得以解决:
6.一种基于广义内模控制算法的磁浮列车悬浮系统的控制方法,具体包括以下步骤:
7.s100:获取悬浮系统中悬浮磁铁参数、电路参数和悬浮系统的质量参数,结合原始悬浮力和平衡点处的悬浮力,建立悬浮系统原始模型;
8.获取悬浮系统的不确定性,根据悬浮系统的不确定性,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,优化后的悬浮系统模型中包含不确定性参数;
9.s200:根据优化后的悬浮系统模型,构建含有不确定性参数变化系数的悬浮系统传递函数,当不确定性参数变化系数为零时,悬浮系统的传递函数为标称的传递函数;
10.s300:获取悬浮系统的标称控制器,通过标称控制器和标称的传递函数得到标称控制器控制下的悬浮系统的输出;
11.s400:采用广义内模控制算法,根据标称控制器和标称的传递函数获取悬浮系统的鲁棒控制器,根据悬浮系统的鲁棒控制器得到鲁棒控制器等效实现参数;通过标称控制器、含有不确定性参数变化系数的悬浮系统传递函数和鲁棒控制器等效实现参数,得到鲁棒控制器控制下的悬浮系统的输出;
12.s500:根据优化后的悬浮系统模型构建的含有不确定性参数变化系数的悬浮系统传递函数,选择标称控制器或鲁棒控制器对悬浮系统进行控制:当优化后的悬浮系统模型的不确定性参数变化系数为零时,则悬浮系统由标称控制器进行控制;当优化后的悬浮系统模型的不确定性参数变化系数不为零时,则悬浮系统由鲁棒控制器进行控制。
13.优选的,步骤s100中,悬浮磁铁参数包括:真空中的磁导率、悬浮磁铁和轨道的极面积、悬浮磁铁线圈的匝数、悬浮间隙;电路参数包括:悬浮磁铁线圈中的实际电流、期望电流值、电流环的反馈增益、悬浮磁铁线圈的电阻;
14.悬浮系统原始模型表达式为公式(1):
[0015][0016]
其中:f
t
(t)表示原始悬浮力;f0表示平衡点处的悬浮力;是一个常数;μ0表示真空中的磁导率;s表示悬浮磁铁和轨道的极面积;n
turns
表示悬浮磁铁线圈的匝数;i0表示平衡点处的悬浮电流;δ0表示平衡点处的悬浮间隙;i(t)表示悬浮磁铁线圈中的实际电流;δ(t)表示悬浮磁铁和轨道之间的实际间隙;u(t)表示期望电流值;k0表示电流环的前馈增益;kr表示电流环的反馈增益;r表示悬浮磁铁线圈的电阻;是一个常数;表示i(t)的一阶导数;是一个常数;表示δ(t)的一阶导数;m表示悬浮系统的质量;表示δ(t)的二阶导数;g表示重力加速度。
[0017]
优选的,步骤s100中获取悬浮系统的不确定性,根据悬浮系统的不确定性,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,包括:
[0018]
s110:获取悬浮系统的不确定性,根据悬浮系统的不确定性,通过悬浮系统受力分析,对原始悬浮力进行优化,得到优化后的悬浮力fs(t),其表达式为公式(2):
[0019]fs
(t)=f0 kiγi(t)-k
δ
γδ(t)
ꢀꢀꢀꢀ
(2)
[0020]
其中:γ表示不确定性参数;
[0021]
s120:通过优化后的悬浮力fs(t)对悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,其表达式为公式(3):
[0022][0023]
优选的,s110中,当悬浮系统的不确定性为垂直不确定性时,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有垂直不确定性的优化后的悬浮力及垂直方向
的不确定性参数,具体为:
[0024]
s111a:获取垂直不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,得到带有垂直不确定性的悬浮力fn(t),其表达式为公式(4):
[0025][0026]
其中,fn(t)表示带有垂直不确定性的悬浮力;
[0027]
s112a:根据带有垂直不确定性的悬浮力和原始悬浮力,获得垂直差值δfa(t):
[0028][0029]
s113a:根据垂直差值δfa(t)对带有垂直不确定性的悬浮力fn(t)进行等效变换,得到带有垂直不确定性的优化后的悬浮力f
s(a)
(t)及垂直方向的不确定性参数γa,带有垂直不确定性的优化后的悬浮力f
s(a)
(t)的表达式为公式(6):
[0030][0031]
其中,垂直方向的不确定性参数
[0032]
优选的,s110中,当悬浮系统的不确定性为水平不确定性时,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有水平不确定性的优化后的悬浮力及水平方向的不确定性参数,具体为:
[0033]
s111b:获取带有垂直和水平不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有垂直和水平不确定性的悬浮力f
nl
(t),其表达式为公式(7):
[0034][0035]
其中,a表示磁极宽度的一半;δy(t)表示轨道与电磁铁之间横向错位的长度;
[0036]
s112b:根据带有垂直和水平不确定性的悬浮力f
nl
(t)设定水平方向的不确定性参数γb,对带有垂直和水平不确定性的悬浮力f
nl
(t)进行泰勒展开,得到带有水平不确定性的优化后的悬浮力f
s(b)
(t):
[0037]
令则带有垂直和水平不确定性的悬浮力f
nl
(t)的等效式为公式(8):
[0038][0039]
将f
nl
(t)进行泰勒展开,得到带有水平不确定性的优化后的悬浮力f
s(b)
(t),其表达式为公式(9):
[0040][0041]
优选的,s110中,当悬浮系统的不确定性为垂直和水平不确定性时,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有垂直和水平不确定性的优化后的悬浮力及垂直和水平方向的不确定性参数,具体为:
[0042]
s111c:获取带有垂直和水平不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,得到带有垂直和水平不确定性的悬浮力f
nl
(t);
[0043]
s112c:根据带有垂直和水平不确定性的悬浮力f
nl
(t),获取其与带有水平不确定性的优化后的悬浮力f
s(b)
(t)之间的差值δfc(t),其表达式为公式(10):
[0044][0045]
s113c:根据带有水平不确定性的优化后的悬浮力f
s(b)
(t)及差值δfc(t)对带有垂直和水平不确定性的悬浮力进行等效变换,得到带有垂直和水平不确定性的优化后的悬浮力f
s(c)
(t)及垂直和水平方向的不确定性参数γc,其中,带有垂直和水平不确定性的优化后的悬浮力f
s(c)
(t)表达式为公式(11):
[0046][0047]
其中,垂直和水平方向的不确定性参数为:
[0048]
优选的,步骤s200包括:
[0049]
s210:根据优化后的悬浮系统模型,对其进行拉普拉斯变换可得公式(12):
[0050][0051]
其中:i(s),δ(s),u(s)分别表示i(t),δ(t),u(t)经过拉普拉斯变换的表达式;si(s)表示i(s)的一阶导数;sδ(s)表示δ(s)的一阶导数;s表示拉普拉斯算子;
[0052]
根据上式,得到含有不确定参数的悬浮系统的传递函数,其表达式为公式(13):
[0053][0054]
s220:根据预设的不确定性参数的取值范围,设计不确定性参数的表达式为公式(14):
[0055]
γ=γ0 γwδ
γ
ꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0056]
其中,δ
γ
∈[-1,1];γ
min
表示预设的不确定性参数的最小值;γ
max
表示预设的不确定性参数的最大值,δ
γ
表示不确定性参数变化系数。
[0057]
s230:将公式(14)的不确定性参数的表达式代入公式(13),得到含有不确定性参数变化系数的悬浮系统传递函数表达式(15):
[0058][0059]
其中,wn=-k0kiγw;wm=-k
δ
(r k0kr)γw;;θ表示第一校正系数;k表示第二校正系数;
[0060]
s240:当不确定性参数变化系数δ
γ
为零时,公式(15)变换成标称的传递函数,其表达式为公式(16):
[0061][0062]
优选的,步骤s300包括:
[0063]
s310:获取悬浮系统的标称控制器k0(s),其表达式为公式(17):
[0064][0065]
其中:k0(s)表示标称控制器;k
p
表示比例项系数;ki表示积分项系数;kd表示微分项系数;u(s)=1;
[0066]
s320:通过标称的传递函数p0(s)和标称控制器k0(s),得到标称控制器k0(s)控制下的悬浮系统的输出,即标称悬浮系统的实际悬浮间隙,其表达式为公式(18):
[0067][0068]
其中:r0表示标称控制器控制下的悬浮系统的期望间隙;y0表示标称控制器控制下的悬浮系统的实际悬浮间隙。
[0069]
优选的,步骤s400包括:采用广义内模控制算法,根据标称控制器和含有不确定性参数变化系数的悬浮系统传递函数获取悬浮系统的鲁棒控制器,鲁棒控制器包括鲁棒控制器等效实现参数;通过标称控制器、含有不确定性参数变化系数的悬浮系统传递函数和鲁棒控制器等效实现参数,得到鲁棒控制器控制下的悬浮系统的输出,具体为:
[0070]
s410:采用广义内模控制算法,根据标称控制器和含有不确定性参数变化系数的悬浮系统传递函数获取悬浮系统的鲁棒控制器k(s),其表达式为公式(19):
[0071][0072]
其中,n(s)u(s) m(s)v(s)=i;q(s)表示鲁棒控制器的新增参数;
[0073]
s420:根据鲁棒控制器k(s)和含有不确定性参数变化系数的悬浮系统传递函数对鲁棒控制器的新增参数q(s)进行等效实现,得到鲁棒控制器等效实现参数q'(s),其表达式为公式(20):
[0074][0075]
其中:t表示第三校正系数;
[0076]
s430:通过标称控制器k0(s)、含有不确定性参数变化系数的悬浮系统传递函数p(s)和鲁棒控制器等效实现参数q'(s),得到鲁棒控制器控制下的悬浮系统的输出,即鲁棒控制器控制下的悬浮系统的实际悬浮间隙,其表达式为公式(21):
[0077][0078]
其中:y表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙;其中:y表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙;r表示鲁棒控制器控制下的悬浮系统的期望间隙。
[0079]
优选的,步骤s420具体为:
[0080]
将鲁棒控制器k(s)和含有不确定性参数变化系数的悬浮系统传递函数表达式(15)进行线性分式变换,获得闭环传递函数为公式(22):
[0081]
t
er
(s)=f
l
(m
lft
(s),δ)=m
11
(s) m
12
(s)δ(i-δm
22
(s))-1m21
(s)
ꢀꢀꢀꢀꢀ
(22)
[0082]
其中,t
er
(s)表示从r到e的闭环传递函数,e表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙和鲁棒控制器控制下的悬浮系统的期望间隙之间的差值,即:e=y-r;
[0083]
其中,f
l
(m
lft
(s),δ)表示m
lft
(s)和δ构成的线性分式变换;δ=[δ
γ
ꢀ‑
δ
γ
];
[0084][0085]m11
(s)=-m(s)(v(s)-q(s)n(s))[m(s)v(s)-n(s)u(s)-2q(s)m(s)n(s)]-1
;
[0086]m12
(s)=(v(s)-q(s)n(s))[m(s)v(s)-n(s)u(s)-2q(s)m(s)n(s)]-1
;
[0087][0088][0089]
令:res(s)=m
12
(s)δ(i-δm
22
(s))-1m21
(s),对其进行展开、化简后可得公式(23):
[0090][0091]
当res(s)=0,可求得鲁棒控制器的新增参数表达式为:
[0092]
对鲁棒控制器的新增参数表达式进行等效实现,得到鲁棒控制器等效实现表达式
[0093]
本发明由于采用了以上技术方案,具有显著的技术效果:
[0094]
考虑了实际悬浮力与原始模型中原始悬浮力之间的误差,推导了新的悬浮力公式,并基于此建立了不确定性的悬浮系统模型。基于gimc算法(广义内模控制算法)为悬浮系统设计了新的控制器,使系统在运行时,如果系统模型的不确定性为零,则系统由标称控制器进行控制;如果系统模型的不确定性不为零,则系统由鲁棒控制器进行控制。从而使得悬浮系统的跟踪精度更高、鲁棒性更强、抗干扰能力更好。
附图说明
[0095]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0096]
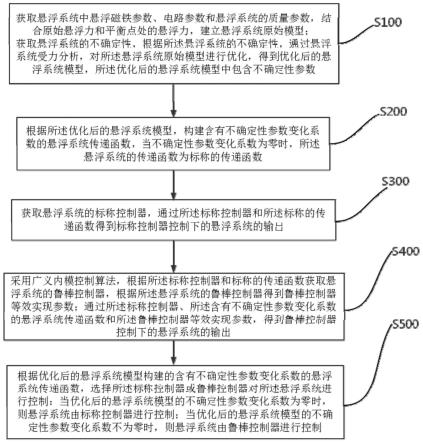
图1为本发明方法的流程示意图;
[0097]
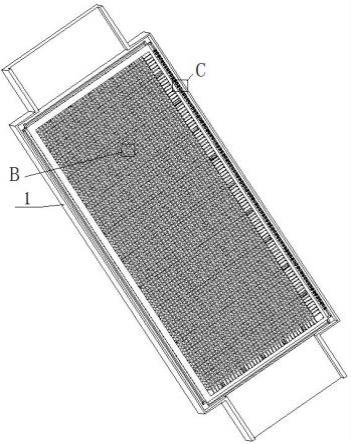
图2为当悬浮系统只存在水平错位时,悬浮磁铁和轨道之间的关系图;
[0098]
图3为gimc控制回路框图;
[0099]
图4为gimc控制回路的等效实现框图;
[0100]
图5为采用本发明方法抗干扰能力测试实验结果;
[0101]
图6为采用本发明方法过台阶能力测试实验环境;
[0102]
图7为采用本发明方法过台阶能力测试实验结果。
具体实施方式
[0103]
下面结合实施例对本发明做进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
[0104]
在一个实施例中,一种基于广义内模控制算法的磁浮列车悬浮系统的控制方法,如图1所示,包括以下步骤:
[0105]
s100:获取悬浮系统中悬浮磁铁参数、电路参数和悬浮系统的质量参数,结合原始悬浮力和平衡点处的悬浮力,建立悬浮系统原始模型;
[0106]
获取悬浮系统的不确定性,根据悬浮系统的不确定性,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,优化后的悬浮系统模型中包含不确定性参数;
[0107]
s200:根据优化后的悬浮系统模型,构建含有不确定性参数变化系数的悬浮系统
传递函数,当不确定性参数变化系数为零时,悬浮系统的传递函数为标称的传递函数;
[0108]
s300:获取悬浮系统的标称控制器,通过标称控制器和标称的传递函数得到标称控制器控制下的悬浮系统的输出;
[0109]
s400:采用广义内模控制算法,根据标称控制器和标称的传递函数获取悬浮系统的鲁棒控制器,根据悬浮系统的鲁棒控制器得到鲁棒控制器等效实现参数;通过标称控制器、含有不确定性参数变化系数的悬浮系统传递函数和鲁棒控制器等效实现参数,得到鲁棒控制器控制下的悬浮系统的输出;
[0110]
s500:根据优化后的悬浮系统模型构建的含有不确定性参数变化系数的悬浮系统传递函数,选择标称控制器或鲁棒控制器对悬浮系统进行控制:当优化后的悬浮系统模型的不确定性参数变化系数为零时,则悬浮系统由标称控制器进行控制;当优化后的悬浮系统模型的不确定性参数变化系数不为零时,则悬浮系统由鲁棒控制器进行控制。
[0111]
本发明建立了不确定性的悬浮系统模型,并为悬浮系统设计了新的控制器。该方法消除不确定性对系统的影响,实现悬浮系统的跟踪精度更高、鲁棒性更强、抗干扰能力更好。
[0112]
在一个实施例中,在步骤s100中,悬浮磁铁参数包括:真空中的磁导率、悬浮磁铁和轨道的极面积、悬浮磁铁线圈的匝数、悬浮间隙;电路参数包括:悬浮磁铁线圈中的实际电流、期望电流值、电流环的反馈增益、悬浮磁铁线圈的电阻;
[0113]
悬浮系统原始模型表达式为公式(1):
[0114][0115]
其中:f
t
(t)表示原始悬浮力;f0表示平衡点处的悬浮力;是一个常数;μ0表示真空中的磁导率;s表示悬浮磁铁和轨道的极面积;n
turns
表示悬浮磁铁线圈的匝数;i0表示平衡点处的悬浮电流;δ0表示平衡点处的悬浮间隙;i(t)表示悬浮磁铁线圈中的实际电流;δ(t)表示悬浮磁铁和轨道之间的实际间隙;u(t)表示期望电流值;k0表示电流环的前馈增益;kr表示电流环的反馈增益;r表示悬浮磁铁线圈的电阻;是一个常数;表示i(t)的一阶导数;是一个常数;表示δ(t)的一阶导数;m表示悬浮系统的质量;表示δ(t)的二阶导数;g表示重力加速度。
[0116]
进一步的,步骤s100中获取悬浮系统的不确定性,根据悬浮系统的不确定性,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,包括:
[0117]
s110:获取悬浮系统的不确定性,根据悬浮系统的不确定性,通过悬浮系统受力分析,对原始悬浮力进行优化,得到优化后的悬浮力fs(t),其表达式为公式(2):
[0118]fs
(t)=f0 kiγi(t)-k
δ
γδ(t)
ꢀꢀꢀꢀ
(2)
[0119]
其中:γ表示不确定性参数;
[0120]
s120:通过优化后的悬浮力fs(t)对悬浮系统原始模型进行优化,得到优化后的悬浮系统模型,其表达式为公式(3):
[0121][0122]
更进一步的,为了更好的确定步骤s110中悬浮系统的不确定性,本发明提供三种方案,包括:
[0123]
第一种方案:当系统只存在垂直错位时,通过悬浮磁铁和轨道之间的关系,计算获得悬浮系统的不确定性;
[0124]
第二种方案:当系统只存在水平错位时,通过悬浮磁铁和轨道之间的关系,计算获得悬浮系统的不确定性;
[0125]
第三种方案:当同时考虑系统垂直和水平方向错位时,通过悬浮磁铁和轨道之间的关系,计算获得悬浮系统的不确定性;
[0126]
具体步骤如下:
[0127]
第一种方案,s110中,当悬浮系统的不确定性为垂直不确定性时,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有垂直不确定性的优化后的悬浮力及垂直方向的不确定性参数,具体为:
[0128]
s111a:获取垂直不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,得到带有垂直不确定性的悬浮力fn(t),其表达式为公式(4):
[0129][0130]
其中,fn(t)表示带有垂直不确定性的悬浮力;
[0131]
s112a:根据带有垂直不确定性的悬浮力和原始悬浮力,获得垂直差值δfa(t):
[0132][0133]
s113a:根据垂直差值δfa(t)对带有垂直不确定性的悬浮力fn(t)进行等效变换,得到带有垂直不确定性的优化后的悬浮力f
s(a)
(t)及垂直方向的不确定性参数γa,带有垂直不确定性的优化后的悬浮力f
s(a)
(t)的表达式为公式(6):
[0134][0135]
其中,垂直方向的不确定性参数
[0136]
第二种方案,图2为当系统只存在水平错位时,悬浮磁铁和轨道之间的关系图,s110中,当悬浮系统的不确定性为水平不确定性时,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有水平不确定性的优化后的悬浮力及水平方向的不确定性参数,具体为:
[0137]
s111b:获取带有垂直和水平不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有垂直和水平不确定性的悬浮力f
nl
(t),其表达式为公式(7):
[0138][0139]
其中,a表示磁极宽度的一半;δy(t)表示轨道与电磁铁之间横向错位的长度;
[0140]
s112b:根据带有垂直和水平不确定性的悬浮力f
nl
(t)设定水平方向的不确定性参数γb,对带有垂直和水平不确定性的悬浮力f
nl
(t)进行泰勒展开,得到带有水平不确定性的优化后的悬浮力f
s(b)
(t):
[0141]
令则带有垂直和水平不确定性的悬浮力f
nl
(t)的等效式为公式(8):
[0142][0143]
将f
nl
(t)进行泰勒展开,得到带有水平不确定性的优化后的悬浮力f
s(b)
(t),其表
达式为公式(9):
[0144][0145]
第三种方案,s110中,当悬浮系统的不确定性为垂直和水平不确定性时,通过悬浮系统受力分析,对悬浮系统原始模型进行优化,得到带有垂直和水平不确定性的优化后的悬浮力及垂直和水平方向的不确定性参数,具体为:
[0146]
s111c:获取带有垂直和水平不确定性的悬浮系统中悬浮磁铁参数和电路参数,根据悬浮系统受力分析,得到带有垂直和水平不确定性的悬浮力f
nl
(t);
[0147]
s112c:根据带有垂直和水平不确定性的悬浮力f
nl
(t),获取其与带有水平不确定性的优化后的悬浮力f
s(b)
(t)之间的差值δfc(t),其表达式为公式(10):
[0148][0149]
s113c:根据带有水平不确定性的优化后的悬浮力f
s(b)
(t)及差值δfc(t)对带有垂直和水平不确定性的悬浮力进行等效变换,得到带有垂直和水平不确定性的优化后的悬浮力f
s(c)
(t)及垂直和水平方向的不确定性参数γc,其中,带有垂直和水平不确定性的优化后的悬浮力f
s(c)
(t)表达式为公式(11):
[0150]
[0151]
其中,垂直和水平方向的不确定性参数为:
[0152]
进一步的,在步骤s200中,步骤s200具体为:
[0153]
s210:根据优化后的悬浮系统模型,对其进行拉普拉斯变换可得公式(12):
[0154][0155]
其中:i(s),δ(s),u(s)分别表示i(t),δ(t),u(t)经过拉普拉斯变换的表达式;si(s)表示i(s)的一阶导数;sδ(s)表示δ(s)的一阶导数;s表示拉普拉斯算子;
[0156]
根据上式,得到含有不确定参数的悬浮系统的传递函数,其表达式为公式(13):
[0157][0158]
s220:根据预设的不确定性参数的取值范围,设计不确定性参数的表达式为公式(14):
[0159]
γ=γ0 γwδ
γ
ꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0160]
其中,δ
γ
∈[-1,1];γ
min
表示预设的不确定性参数的最小值;γ
max
表示预设的不确定性参数的最大值,δ
γ
表示不确定性参数变化系数。
[0161]
s230:将公式(14)的不确定性参数的表达式代入公式(13),得到含有不确定性参数变化系数的悬浮系统传递函数表达式(15):
[0162][0163]
其中,wn=-k0kiγw;wm=-k
δ
(r k0kr)γw;;θ表示第一校正系数;k表示第二校正系数;
[0164]
需要说明的是:n(s),m(s)∈rh∞,rh∞代表稳定正则实有理传递函数集合。为此,引入(s θ)k,且θ为常数。通过分析,当k》3时,n(s)和m(s)存在一个共同零点s=∞;当k《3时,m(s)不是正则的,因此优选的k=3。进一步获得优选的θ=80。
[0165]
s240:当不确定性参数变化系数δ
γ
为零时,公式(15)变换成标称的传递函数,其表达式为公式(16):
[0166][0167]
进一步的,在步骤s300中,获取标称控制器具体步骤为:
[0168]
s310:获取悬浮系统的标称控制器k0(s),其表达式为公式(17):
[0169][0170]
其中:k0(s)表示标称控制器;k
p
表示比例项系数;ki表示积分项系数;kd表示微分项系数;u(s)=1;
[0171]
需要说明的是,本发明采用的是pid控制器进行控制,其中k
p
、ki、kd可通过经验获得最合适的取值,使得在标称控制器k0(s)的控制下,标称控制器k0(s)和标称的传递函数p0(s)组成的闭环系统保持稳定。
[0172]
s320:通过标称的传递函数p0(s)和标称控制器k0(s),得到标称控制器k0(s)控制下的悬浮系统的输出,即标称悬浮系统的实际悬浮间隙,其表达式为公式(18):
[0173][0174]
其中:r0表示标称控制器控制下的悬浮系统的期望间隙,优选的r0取值0.8mm;y0表示标称控制器控制下的悬浮系统的实际悬浮间隙。
[0175]
进一步的,步骤s400包括:采用广义内模控制算法,根据所述标称控制器和所述含有不确定性参数变化系数的悬浮系统传递函数获取悬浮系统的鲁棒控制器,所述鲁棒控制器包括鲁棒控制器等效实现参数;通过所述标称控制器、所述含有不确定性参数变化系数的悬浮系统传递函数和所述鲁棒控制器等效实现参数,得到鲁棒控制器控制下的悬浮系统的输出,具体为:
[0176]
如图3所示,图3为采用广义内模控制算法,由鲁棒控制器k(s)和含有不确定性参数变化系数的悬浮系统传递函数p(s)组成的gimc(generalized internal model control,广义内模控制)控制回路,进行如下推导,得到图4所示的gimc控制回路的等效实现。
[0177]
s410:采用广义内模控制算法,根据所述标称控制器和所述含有不确定性参数变化系数的悬浮系统传递函数获取悬浮系统的鲁棒控制器k(s),其表达式为公式(19):
[0178][0179]
其中,n(s)u(s) m(s)v(s)=i;q(s)表示鲁棒控制器的新增参数;
[0180]
s420:根据所述鲁棒控制器k(s)和所述含有不确定性参数变化系数的悬浮系统传递函数对鲁棒控制器的新增参数q(s)进行等效实现,得到鲁棒控制器等效实现参数q'(s),
其表达式为公式(20):
[0181][0182]
其中:t表示第三校正系数,优选的,t=1/100;
[0183]
s430:通过标称控制器k0(s)、含有不确定性参数变化系数的悬浮系统传递函数p(s)和鲁棒控制器等效实现参数q'(s),得到鲁棒控制器控制下的悬浮系统的输出,即鲁棒控制器控制下的悬浮系统的实际悬浮间隙,其表达式为公式(21):
[0184][0185]
其中:y表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙;其中:y表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙;r表示鲁棒控制器控制下的悬浮系统的期望间隙,优选的r取值0.8mm。
[0186]
进一步的,步骤s420具体为:
[0187]
将鲁棒控制器k(s)和含有不确定性参数变化系数的悬浮系统传递函数表达式(15)进行线性分式变换,获得闭环传递函数为公式(22):
[0188]
t
er
(s)=f
l
(m
lft
(s),δ)=m
11
(s) m
12
(s)δ(i-δm
22
(s))-1m21
(s)
ꢀꢀꢀꢀꢀ
(22)
[0189]
其中,t
er
(s)表示从r到e的闭环传递函数,e表示鲁棒控制器控制下的悬浮系统的实际悬浮间隙和鲁棒控制器控制下的悬浮系统的期望间隙之间的差值,即:e=y-r;
[0190]
其中,f
l
(m
lft
(s),δ)表示m
lft
(s)和δ构成的线性分式变换;δ=[δ
γ
ꢀ‑
δ
γ
];
[0191][0192]m11
(s)=-m(s)(v(s)-q(s)n(s))[m(s)v(s)-n(s)u(s)-2q(s)m(s)n(s)]-1
;
[0193]m12
(s)=(v(s)-q(s)n(s))[m(s)v(s)-n(s)u(s)-2q(s)m(s)n(s)]-1
;
[0194][0195][0196]
令:res(s)=m
12
(s)δ(i-δm
22
(s))-1m21
(s),对其进行展开、化简后可得公式(23):
[0197][0198]
根据公式(22)可得,其中:m
11
(s)是确定的部分,m
12
(s)δ(i-δm
22
(s))-1m21
(s)是包含不确定性的部分,若要系统稳定,令res(s)=0,于是可以有三种情况:
[0199][0200]
1、当v(s)-q(s)n(s)=0,可得到:
[0201]
2、当u(s) q(s)m(s)=0,可得到:由于悬浮系统自不稳定,即标称的传递函数具有不稳定的极点,因此,不能使用。
[0202]
3、-m(s)wm(s)δ
γ-n(s)wm(s)δ
γ
=0,这个不确定性是系统自身决定的,不能使用。
[0203]
对鲁棒控制器的新增参数表达式进行等效实现,得到鲁棒控制器等效实现表达式
[0204]
根据目前商业运营的磁浮列车的实际情况,悬浮系统主要包括机械、控制、电力电子等子系统。其中悬浮系统单转向架平台包括载重平台、空气弹簧、防滚梁、抱臂、悬浮模块、控制机箱等,采用本发明设计的控制器进行实验:
[0205][0206][0207]
其中,k
p
=5000,ki=5,kd=1000,k0=250,t=1/100,k=3。由于采用gimc算法,θ的取值不影响系统性能。当δ∈[0.004,0.012]m且i∈[10,30]a时,可求得γ∈[0.5499,5.8008],进而γ0=3.1753。接着,将本发明设计的控制器在悬浮系统的平台上进行试验。
[0208]
试验1:抗干扰能力测试
[0209]
抗干扰能力测试实验的详细过程是:首先,将空气弹簧充满气。其次,接通330v强电保证电磁线圈的电压供应,接通110v弱电启动控制器机箱。第三,执行悬浮命令,使单转向架平台稳定悬浮在9mm处。第四,用龙门吊将重物吊到载重平台的中心线以上固定位置处,然后释放重物,它会自由落体到平台上。此时单转向架平台会因自由落体的冲击而出现间隙波动,随后会在控制算法的作用下逐渐恢复到稳定的悬浮状态。待单转向架平台恢复到稳定悬浮在9mm的状态后,再次将重物提升至相同高度,重复第四步共3次。同时使用上位机程序记录系统的相关数据。上述实验过程共进行两次。第一次不启动算法内环,即系统完全由标称控制器控制;第二次启动算法内环,即系统由鲁棒控制器控制。
[0210]
实验结果如图5所示,图5为采用本发明方法抗干扰能力测试实验结果图,图中展示了实验过程中悬浮间隙和悬浮电流的变化过程,其中:图5(a)表示抗干扰能力测试实验中不启动算法内环的悬浮间隙;图5(b)表示抗干扰能力测试实验中启动算法内环的悬浮间隙,图5(c)表示抗干扰能力测试实验中不启动算法内环的悬浮电流;图5(d)表示抗干扰能
力测试实验中启动算法内环的悬浮电流。可以看出,重物的自由落体确实令单转向架平台的悬浮间隙和电流产生了波动。在这种情况下,两种算法都可以保持系统稳定不发散。借助辅助参考线进行进一步观察,间隙图中的两条参考线分别为8.8mm和9.2mm,电流图中的两条参考线分别为17.5a和21.5a。可以看出,启动内环后系统的抗干扰能力明显增强。
[0211]
试验2:过台阶能力测试
[0212]
在磁浮列车运行过程中,轨道台阶对系统动态性能的影响比较明显。为了研究系统在过台阶时的性能表现,在图6所示的轨道台阶上进行实验。其中,使用游标卡尺测得的轨道台阶尺寸为:水平方向的距离为23mm,垂直方向的偏差为1.6mm。
[0213]
具体实验过程为:首先将单转向架稳定悬浮在9mm处,这里的操作与抗干扰能力测试实验一致。接下来,令悬浮系统以图6中箭头指示的方向以速度v在轨道上缓慢运行并通过台阶。在本实施例中,将该过程称为单转向架平台的向前运动。在悬浮点1通过轨道台阶后,使单台转向架平台以相同速度向沿相反方向缓慢运行,返回起始位置。在本实施例中,将该过程称为单转向架平台的向后运动。至此完成一次过台阶实验,并使用上位机程序记录系统的相关数据。上述实验过程共进行两组,每组均使悬浮系统向前向后运动两次。第一次不启动算法内环;第二次启动算法内环。
[0214]
实验结果如图7所示,图中展示了实验过程中悬浮间隙和悬浮电流的变化过程。其中:图7(a)表示过台阶能力测试实验中不启动算法内环的悬浮间隙;图7(b)表示过台阶能力测试实验中启动算法内环的悬浮间隙,图7(c)表示过台阶能力测试实验中不启动算法内环的悬浮电流;图7(d)表示过台阶能力测试实验中启动算法内环的悬浮电流。可以看出,轨道台阶的存在使得单转向架平台的悬浮间隙和电流均产生了波动。在这种情况下,两种算法都可以保持系统稳定不发散。借助辅助参考线进行进一步观察,间隙图中的两条参考线分别为8.8mm和9.2mm,电流图中的两条参考线分别为16a和20a。可以看出,启动内环后悬浮间隙波动明显变小,且电流波动在很多细节上都比更小。这表明在内环的作用下,系统过台阶时的性能有所增强。
[0215]
采用本发明的方法,在悬浮系统的单转向架平台上进行了抗干扰能力测试和过台阶能力测试,实验结果表明本发明设计的控制器的有效性和鲁棒性。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。