1.本发明涉及一种相对载荷产生使其平衡的力的载荷补偿装置。
背景技术:
2.近年来,在各种场景中利用人力进行重物的搬运作业,为了减轻负担而使用辅助装置。但是,由于它们大多是使用致动器的辅助装置,因此会带来因需要电源而导致的使用场所的限制,或者与人的协调作业中的安全性的降低。因此,不使用致动器的机械载荷补偿装置被认为是有效的。
3.在此,在专利文献1中,作为不使用致动器的机械载荷补偿装置,公开了一种补偿重量切换式载荷补偿装置。
4.在专利文献1所记载的补偿重量切换式载荷补偿装置中,除了机械自重补偿机构的构造之外,为了能够对应追加新载荷的情况,通过追加第二个弹簧和由齿轮构成的切换机构,能够进行臂的自重补偿状态及追加了设定的载荷的情况这两种状态的载荷补偿。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2011-098821号公报
技术实现要素:
8.发明所要解决的课题
9.但是,在将载荷补偿装置用于搬运作业的辅助等情况下,要求能够在任意的高度调整应补偿的载荷。与此相对,在以往的载荷补偿装置中,需要将载荷补偿装置设为规定的基准姿势来进行应补偿的载荷的调整等,在便利性方面存在改善的余地。
10.本发明的课题是实现具有更高便利性的载荷补偿装置。
11.用于解决技术课题的手段
12.为了解决上述问题,本发明的一方式所涉及的载荷补偿装置具备:
13.支承体;
14.第一连杆部件,其相对于在所述支承体中成为支点的旋转中心,在一端侧作用有成为负荷的物体的重量,并且在另一端侧输入用于载荷补偿的力;
15.第一绳索部件,其架设在所述第一连杆部件的所述支点的位置和输入用于所述载荷补偿的力的位置,从所述第一连杆部件的所述支点的位置和输入用于所述载荷补偿的力的位置向铅垂下方延伸,并且一端被固定;以及
16.扭矩赋予单元,其赋予用于卷绕所述第一绳索部件的另一端的转矩。
17.发明效果:
18.根据本发明,能够实现具有更高便利性的载荷补偿装置。
附图说明
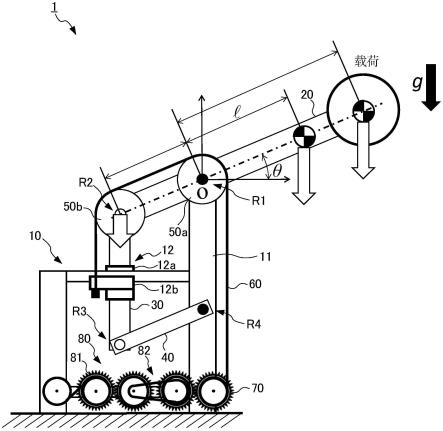
19.图1是表示第一实施方式所涉及的载荷补偿装置1的整体结构的示意图。
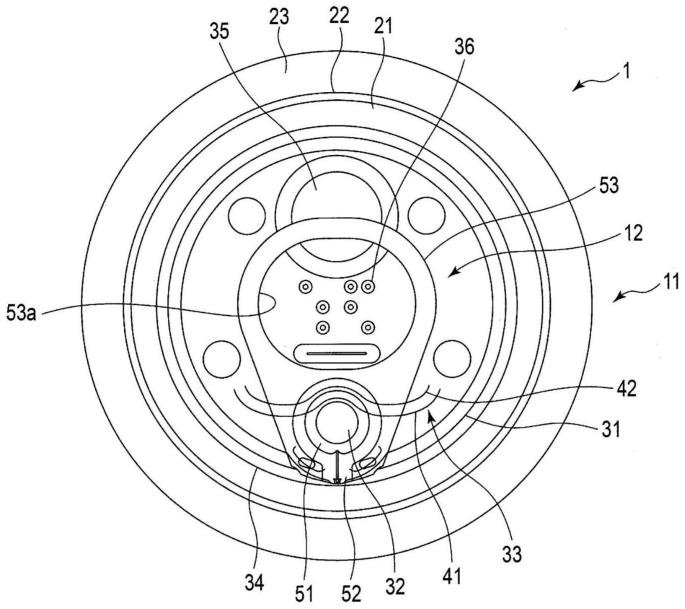
20.图2是表示第二实施方式所涉及的载荷补偿装置1的整体结构的示意图。
21.图3是表示使载荷补偿装置1的前表面侧的部件局部透过的整体结构的示意图。
具体实施方式
22.下面,参照附图对本发明的实施方式进行说明。
23.[第一实施方式]
[0024]
[结构]
[0025]
图1是表示第一实施方式所涉及的载荷补偿装置1的整体结构的示意图。此外,在图1中,示意性地示出载荷补偿装置1的连杆结构。
[0026]
在图1中,载荷补偿装置1具备支承部10、第一连杆20、第二连杆30、第三连杆40、带轮50a、50b、线60、线卷绕部70、扭矩赋予部80。
[0027]
此外,在图1中,g表示重力加速度,m表示赋予载荷的质量,m表示第一连杆20的质量,l表示从第一连杆20的旋转中心o到载荷作用点的距离,l表示从第一连杆20的旋转中心o到重心的距离,p表示从第一连杆20的旋转中心o到线60的张力的作用点的距离,θ表示第一连杆20与水平方向的角度。另外,α表示后述的变速器82的变速比(增益),αf表示变速器82的输出。
[0028]
支承部10是成为支承载荷补偿装置1整体的基座的部件,具备:支柱部11,其以能够在旋转轴r1上旋转的方式支承第一连杆20;以及滑动机构12,其将第二连杆30支承为能够在铅垂方向及水平方向上滑动。此外,滑动机构12具备:直线导轨12a,其将第二连杆30支承为能够在铅垂方向上滑动;以及直线导轨12b,其将直线导轨12a支承为能够在水平方向上滑动。
[0029]
第一连杆20在一端侧作用有成为负荷的物体的重量(载荷),并且在另一端侧具备能够在旋转轴r2上旋转的带轮50b。另外,第一连杆20在支承部10的旋转轴r1上被以能够旋转的方式支承中央部。
[0030]
第二连杆30在一端侧被第一连杆20的旋转轴r2以能够旋转的方式支承。另外,第二连杆30被滑动机构12的直线导轨12a支承为能够在铅垂方向上滑动。此外,第二连杆30在另一端侧以能够在旋转轴r3上旋转的方式支承第三连杆40的一端。
[0031]
第三连杆40在一端侧被第二连杆30的旋转轴r3以能够旋转的方式支承。另外,第三连杆40的另一端在旋转轴r4上被支承部10以能够旋转的方式支承。旋转轴r1和旋转轴r4之间的距离与第二连杆30的长度相同。即,第一连杆20的从旋转轴r1到旋转轴r2的部分和第二连杆30、第三连杆40以及支承部10的从旋转轴r1到旋转轴r4的部分构成平行连杆。因此,当第一连杆20相对于支承部10的角度发生变化时,第二连杆30在维持沿着铅垂上下方向的姿势的状态下,通过滑动机构12的作用,相对于支承部10在铅垂方向及水平方向上移动。
[0032]
带轮50a在支承部10的支柱部11的前端设置成能够以可旋转地连结第一连杆20的旋转轴r1为中心进行旋转。
[0033]
带轮50b设置成能够以连结第一连杆20及第二连杆30的旋转轴r2为中心进行旋
转。
[0034]
线60架设在带轮50b上,将一端设置在滑动机构12的直线导轨12b上的带轮50b的铅垂下方的位置。因此,线60的一端始终维持从带轮50b向铅垂下方延伸的状态。另外,线60从带轮50b架设到带轮50a,另一端卷绕在线卷绕部70。
[0035]
线卷绕部70卷绕线60或者抽出线60,以达到由扭矩赋予部80赋予的转矩。由此,施加在线60上的张力由从扭矩赋予部80赋予的转矩控制,生成用于载荷补偿的力(载荷补偿力)。另外,线卷绕部70设置在带轮50a的铅垂下方,并设置为架设在带轮50a上的线60的另一端向铅垂下方延伸并卷绕。线60的一端侧和另一端侧从架设在带轮50a、50b上的部分向铅垂下方延伸,带轮50a、50b之间的部分与第一连杆20平行。因此,从线60施加在带轮50a、50b上的力中、与第一连杆20平行的力相互抵消,仅作用有铅垂向下的力。即,在第一连杆20的另一端侧(带轮50b),由线60作用铅垂向下的力,以该力与第一连杆20的自重及施加在一端侧的载荷平衡的方式对线卷绕部70赋予转矩,从而实现载荷补偿。
[0036]
扭矩赋予部80向线卷绕部70赋予卷绕线60的转矩。
[0037]
具体地说,扭矩赋予部80具备定扭矩弹簧81和变速器82。
[0038]
定扭矩弹簧81例如由接触式盘簧等构成,输出恒定的转矩。
[0039]
变速器82通过利用齿轮与定扭矩弹簧81连结等,输入定扭矩弹簧81输出的恒定的转矩。另外,变速器82具备无级或多级变速机构,对输入的恒定的转矩赋予增益并输出到线卷绕部70。通过将在变速器82中赋予的增益设定为目标值,能够使赋予线卷绕部70的转矩发生变化,因此能够调整在载荷补偿装置1中补偿的载荷。
[0040]
[载荷补偿的原理]
[0041]
在上述结构中,基于载荷mg的转矩及基于第一连杆20的自重mg的转矩的合计与基于变速器82的输出αf的转矩互相平衡成为载荷补偿装置1中的载荷补偿的条件。
[0042]
即,需要设定α,以使下式(1)成立。
[0043]m×g×
l
×
cosθ m
×g×
l
×
cosθ=α
×f×
p
×
cosθ
ꢀꢀꢀ
(1)
[0044]
在此,变速器82的输出αf取决于定扭矩弹簧81输出的转矩τ、线卷绕部70的卷筒半径r,因此对α求解式(1)时,得到下式(2)。
[0045]
α=(m
×
l m
×
l)
×g×
r/(p
×
τ)
ꢀꢀꢀ
(2)
[0046]
在式(2)中,第二连杆20相对于水平方向的角度θ不包括在确定α的要素中。
[0047]
即,无论第一连杆20处于哪个旋转角度,式(2)都成立。
[0048]
因此,在载荷补偿装置1中,在补偿任意载荷的情况下,根据补偿的载荷,由式(2)计算出变速比α,并将变速器82的变速比设定为α,从而能够实现任意姿势下的载荷补偿。
[0049]
[作用]
[0050]
在具有上述结构的载荷补偿装置1中,当确定作用于第一连杆20的载荷mg时,由于第一连杆20的自重是已知的,因此可通过式(2)计算变速器82应该设定的变速比(增益)α。
[0051]
而且,在变速器82中,当操作者将变速比α设定为计算出的值时,变速器82的输出αf施加在线60上,该输出αf通过线60来传递,在带轮50b的位置,产生使第一连杆20向与载荷的方向相反的方向旋转的转矩。
[0052]
基于输出αf的转矩与由第一连杆20的自重及物体作用的载荷产生的绕点o的转矩互相平衡。
[0053]
此外,无论第一连杆20在哪个旋转角度下,式(2)都成立,因此可实现任意姿势下的载荷补偿。
[0054]
在此,在载荷补偿装置1中,设为作用于第一连杆20的载荷变为了m'g。
[0055]
此时,按照式(2),计算出与载荷m'g对应的新的变速比(增益)α',操作者将变速器82的变速比(增益)设定为计算出的值α'。
[0056]
于是,基于变速器82的输出α'f的转矩与由第一连杆20的自重及物体作用的新的载荷产生的绕点o的转矩互相平衡,能够对应于应该补偿的载荷的变化实现载荷补偿。
[0057]
即,能够实现具有更高便利性的载荷补偿装置1。
[0058]
[第二实施方式]
[0059]
接下来,对本发明的第二实施方式进行说明。
[0060]
在第一实施方式中,对具有利用从扭矩赋予部80传递到线60的张力来补偿作用于第一连杆20的载荷的结构的载荷补偿装置1进行了说明。
[0061]
与此相对,可设为如下结构:将作用有载荷的连杆连结,利用从扭矩赋予部80传递到线60的张力分别补偿向各连杆输入的载荷。即,在连结有多个连杆的多关节机构中,可以在另一端侧利用线的张力来补偿作用于各连杆的一端侧的载荷。
[0062]
下面,以第一实施方式中的第一连杆20为将两个连杆串联连结而成的结构的情况为例,对进行各连杆的载荷补偿的装置结构进行说明。
[0063]
[结构]
[0064]
图2是表示第二实施方式所涉及的载荷补偿装置1的整体结构的示意图。
[0065]
另外,图3是表示使载荷补偿装置1的前表面侧的部件局部透过的整体结构的示意图。此外,在图2和图3中,示意性地示出了载荷补偿装置1的连杆结构。
[0066]
在图2和图3中,载荷补偿装置1具备支承部110、第一连杆120、第二连杆130、第三连杆140、第四连杆150、第五连杆160、第六连杆170、第七连杆180、第八连杆190、带轮200a~200e、线210a~210c、线卷绕部220a、220b、扭矩赋予部230以及载物台s。在第二实施方式的载荷补偿装置1中,第六连杆170、第七连杆180、第八连杆190、带轮200b、线210b以及线卷绕部220b配置于支承部110的背面侧(纸面里侧),因此在图3中,使前表面侧的部件适当透过,以使说明所需的部件可视化。
[0067]
另外,在图2及图3中,g表示重力加速度,m表示赋予载荷的质量,m1表示第一连杆120的质量,m2表示第四连杆150的质量,l1表示从第一连杆120的旋转中心o1到载荷作用点的距离,l2表示从第四连杆150的旋转中心o2到载荷作用点的距离,l1表示从第一连杆120的旋转中心o1到重心的距离,l2表示从第四连杆150的旋转中心o2到重心的距离,p1表示从第一连杆120的旋转中心o1到线60的张力的作用点的距离,p2表示从第六连杆170的旋转中心o1到线210b的张力的作用点的距离,θ1表示第一连杆120相对于水平方向的角度,θ2表示第四连杆150相对于水平方向的角度。另外,α1表示后述的变速器232a的变速比(增益),α1
·
f1表示变速器232a的输出,α2表示后述的变速器232b的变速比(增益),α2
·
f2表示后述的变速器232b的输出。
[0068]
支承部110是成为支承载荷补偿装置1整体的基座的部件,该支承部110具备:支柱部111,其以能够在旋转轴r1上旋转的方式支承第一连杆120;滑动机构112,其将第二连杆130支承为能够在铅垂方向及水平方向上滑动;以及滑动机构113,其将第七连杆180支承为
能够在铅垂方向及水平方向上滑动。另外,滑动机构112具备:直线导轨112a,其将第二连杆130支承为能够在铅垂方向上滑动;以及直线导轨112b,其将直线导轨112a支承为能够在水平方向上滑动。另外,滑动机构113具备:直线导轨113a,其将第七连杆180支承为能够在铅垂方向上滑动;以及直线导轨113b,其将直线导轨113a支承为能够在水平方向上滑动。
[0069]
第一连杆120构成为平行连杆,具备上连杆部件120a和下连杆部件120b。第一连杆120在上连杆部件120a的一端侧作用有成为负荷的物体的重量(载荷),并且在另一端侧具备能够在旋转轴r2上旋转的带轮200b。另外,上连杆部件120a在支承部110的旋转轴r1上被以能够旋转的方式支承中央部。另外,第一连杆120的下连杆部件120b在一端侧作用有成为负荷的物体的重量(载荷),并且另一端侧在旋转轴r5上被支承部110以能够旋转的方式支承。
[0070]
第二连杆130在一端侧被第一连杆120的旋转轴r2以能够旋转的方式支承。另外,第二连杆130被滑动机构112的直线导轨112a支承为能够在铅垂方向上滑动。此外,第二连杆130在另一端侧以能够在旋转轴r3上旋转的方式支承第三连杆140的一端。
[0071]
第三连杆140在一端侧被第二连杆130的旋转轴r3以能够旋转的方式支承。另外,第三连杆140在旋转轴r4上被支承部110以能够旋转的方式支承另一端。旋转轴r1和旋转轴r4之间的距离与第二连杆130的长度相同。即,第一连杆120的从旋转轴r1到旋转轴r2的部分和第二连杆130、第三连杆140以及支承部110的从旋转轴r1到旋转轴r4的部分构成平行连杆。因此,当第一连杆120相对于支承部110的角度变化时,第二连杆130在维持沿着铅垂上下方向的姿势的状态下,通过滑动机构112的作用,相对于支承部110在铅垂方向及水平方向上移动。
[0072]
第四连杆150构成为平行连杆,具备上连杆部件150a和下连杆部件150b。第四连杆150在上连杆部件150a的一端侧作用有成为负荷的物体的重量(载荷),并且另一端侧在旋转轴r6上被第一连杆120的上连杆部件120a以能够旋转的方式支承。另外,第四连杆150的下连杆部件150b在一端侧作用有成为负荷的物体的重量(载荷),并且另一端侧在旋转轴r7上被第一连杆120的下连杆部件120b以能够旋转的方式支承。
[0073]
第五连杆160在旋转轴r6上以能够旋转的方式支承第一连杆120的上连杆部件120a及第四连杆150的上连杆部件150a,并且在旋转轴r7上以能够旋转的方式支承第一连杆120的下连杆部件120b及第四连杆150的下连杆部件150b。
[0074]
第六连杆170在支承部110的旋转轴r1上被以能够旋转的方式支承一端,并且在另一端侧以能够在旋转轴r8上旋转的方式支承第七连杆180。
[0075]
第七连杆180在一端侧被第六连杆170的旋转轴r8以能够旋转的方式支承。另外,第七连杆180被滑动机构113的直线导轨113a支承为能够在铅垂方向上滑动。此外,第七连杆180在另一端侧以能够在旋转轴r9上旋转的方式支承第八连杆190的一端。
[0076]
第八连杆190在第七连杆180的旋转轴r9上被以能够旋转的方式支承一端侧,并且在另一端侧被支承部110的旋转轴r4以能够旋转的方式支承。
[0077]
带轮200a在支承部110的支柱部111的前端设置成能够以可旋转地连结有第一连杆120的旋转轴r1为中心旋转。
[0078]
带轮200b设置成能够以连结有第一连杆120和第二连杆130的旋转轴r2为中心旋转。
[0079]
带轮200c以能够旋转的方式设置在旋转轴r6上,并且与第四连杆150的上连杆部件150a一体地旋转。
[0080]
带轮200d在支承部110的支柱部111的前端设置成能够以旋转轴r1为中心旋转,并且与第六连杆170一体地旋转。
[0081]
此外,在带轮200c和带轮200d上,卷绕有扭矩传递用的线210c,使第四连杆150的上连杆部件150a和第六连杆170联动。
[0082]
带轮200e设置成能够以连结有第六连杆170和第七连杆180的旋转轴r8为中心旋转。
[0083]
线210a架设在带轮200b上,将一端设置在滑动机构112的直线导轨112b上的带轮200b的铅垂下方的位置。因此,线210a的一端维持从带轮200b始终向铅垂下方延伸的状态。另外,线210a从带轮200b架设到带轮200a,另一端卷绕在线卷绕部220a上。
[0084]
线210b架设在带轮200e上,将一端设置在滑动机构113的直线导轨113b上的带轮200e的铅垂下方的位置。因此,线210b的一端维持从带轮200e始终向铅垂下方延伸的状态。另外,线210b从带轮200e架设到带轮200d,另一端卷绕在线卷绕部220b上。
[0085]
线210c卷绕在带轮200c和带轮200d上,使第四连杆150的上连杆部件150a和第六连杆170联动。即,线210c在第四连杆150的上连杆部件150a和第六连杆170上传递转矩。
[0086]
线卷绕部220a卷绕线210a或抽出线210a,以达到由扭矩赋予部230赋予的转矩。由此,施加在线210a上的张力由从扭矩赋予部230赋予的转矩控制,生成用于第一连杆120中的载荷补偿的力(载荷补偿力)。另外,线卷绕部220a设置在带轮200a的铅垂下方,并设置为架设在带轮200a上的线210a的另一端向铅垂下方延伸并卷绕。线210a的一端侧和另一端侧从架设在带轮200a、200b上的部分向铅垂下方延伸,带轮200a、200b之间的部分与第一连杆120平行。因此,从线210a施加在带轮200a、200b上的力中、与第一连杆120平行的力互相抵消,仅作用有铅垂向下的力。即,在第一连杆120的另一端侧(带轮200b),由线210a作用铅垂向下的力,以该力与第一连杆120的自重及施加在一端侧的载荷平衡的方式对线卷绕部220a赋予转矩,从而实现第一连杆120中的载荷补偿。
[0087]
线卷绕部220b卷绕线210b或抽出线210b,以达到由扭矩赋予部230赋予的转矩。由此,施加在线210b上的张力由从扭矩赋予部230赋予的转矩控制,生成用于第四连杆150中的载荷补偿的力(载荷补偿力)。另外,线卷绕部220b设置在带轮200d的铅垂下方,并设置为架设在带轮200d上的线210b的另一端向铅垂下方延伸并卷绕。线210b的一端侧和另一端侧从架设在带轮200d、200e上的部分向铅垂下方延伸,带轮200d、200e之间的部分与第六连杆170平行。因此,从线210b施加在带轮200d、200e上的力中、与第六连杆170平行的力互相抵消,仅作用有铅垂向下的力。即,在第六连杆170的另一端侧(带轮200e),由线210b作用铅垂向下的力,该力经由线210c作为带轮200c的转矩被传递。以由线210c传递的力(转矩)与第四连杆150的自重及施加在一端侧的载荷平衡的方式对线卷绕部220b赋予转矩,从而实现第四连杆150中的载荷补偿。
[0088]
扭矩赋予部230对线卷绕部220a、220b赋予卷绕线210a、210b的转矩。在本实施方式中,扭矩赋予部230构成为能够对绕线卷绕部220a和绕线卷绕部220b分别赋予不同的转矩。
[0089]
作为一例,扭矩赋予部230能够单独地具备线卷绕部220a用的扭矩赋予机构和线
卷绕部220b用的扭矩赋予机构。
[0090]
即,扭矩赋予部230作为线卷绕部220a用的扭矩赋予机构,具备定扭矩弹簧231a和变速器232a。
[0091]
定扭矩弹簧231a例如由接触式盘簧等构成,输出恒定的转矩。
[0092]
变速器232a通过利用齿轮与定扭矩弹簧231a连结等,输入定扭矩弹簧231a输出的恒定的转矩。另外,变速器232a具备无级或多级变速机构,对输入的恒定的转矩赋予增益并输出到线卷绕部220a。通过将在变速器232a中赋予的增益设定为目标值,能够使赋予线卷绕部220a的扭矩变化,因此能够调整在第一连杆120中补偿的载荷。
[0093]
另外,扭矩赋予部230作为线卷绕部220b用的扭矩赋予机构,具备定扭矩弹簧231b和变速器232b。
[0094]
定扭矩弹簧231b例如由接触式盘簧等构成,输出恒定的转矩。
[0095]
变速器232b通过利用齿轮与定扭矩弹簧231b连结等,输入定扭矩弹簧231b输出的恒定的转矩。另外,变速器232b具备无级或多级变速机构,对输入的恒定的转矩赋予增益并输出到线卷绕部220b。通过将在变速器232b中赋予的增益设定为目标值,能够使赋予线卷绕部220b的转矩变化,因此能够调整在第四连杆150中补偿的载荷。
[0096]
载物台s载置在载荷补偿装置1中成为补偿载荷的对象的物体。另外,载物台s通过以能够旋转的方式支承第四连杆150的上连杆构件150a和下连杆构件150b,作为平行连杆的一个连杆发挥作用。
[0097]
在上述结构中,第一连杆120中的载荷补偿和第四连杆150中的载荷补偿独立地进行,在第一连杆120中被补偿的载荷中包括第四连杆150的自重及物体的载荷。
[0098]
这些第一连杆120中的载荷补偿的原理及第四连杆150中的载荷补偿的原理与第一实施方式中的情况相同。
[0099]
即,在本实施方式中,如果将定扭矩弹簧231a输出的转矩设为τ1,将线卷绕部220a的卷筒半径设为r1,则第一连杆120的载荷补偿使用的变速比α1用下式(3)来表示。
[0100]
α1=(m1
×
l1 (m2 m)
×
l1)
×g×
r1/(p1
×
τ1)
ꢀꢀꢀ
(3)
[0101]
同样地,在本实施方式中,如果将定扭矩弹簧231b输出的转矩设为τ2,将线卷绕部220b的卷筒半径设为r2,则第四连杆150的载荷补偿使用的变速比α2用下式(4)来表示。
[0102]
α2=(m2
×
l2 m
×
l2)
×g×
r2/(p2
×
τ2)
ꢀꢀꢀ
(4)
[0103]
[作用]
[0104]
在具有上述结构的载荷补偿装置1中,当确定了作用于第四连杆150的载荷mg时,由于第一连杆120和第四连杆150的自重是已知的,因此能够利用式(3)和式(4)计算应该对变速器232a、232b中的每一个设定的变速比(增益)α1、α2。
[0105]
而且,在变速器232a中,当操作者将变速比α1设定为计算出的值时,变速器232a的输出α1
·
f1施加在线210a上,该输出α1
·
f1由线210a传递,在带轮200b的位置,产生使第一连杆120向与载荷的方向相反的方向旋转的转矩。
[0106]
基于输出α1
·
f1的转矩与由第一连杆120的自重、第四连杆150的自重以及物体作用的载荷产生的绕点o1的转矩互相平衡。
[0107]
此外,无论第一连杆120在哪个旋转角度下,式(3)都成立,因此可实现任意姿势下的载荷补偿。
[0108]
同样地,在变速器232b中,当操作者将变速比α2设定为计算出的值时,变速器232b的输出α2
·
f2施加在线210b上,该输出α2
·
f2由线210b传递,在带轮200e的位置,产生使第六连杆170向与载荷的方向相反的方向旋转的转矩。该转矩经由线210c作为带轮200c(即第四连杆150)的转矩传递。
[0109]
基于输出α2
·
f2的转矩与由第四连杆150的自重及物体作用的载荷产生的绕点o2的转矩互相平衡。
[0110]
另外,无论第四连杆150在哪个旋转角度下,式(4)都成立,因此可实现任意姿势下的载荷补偿。
[0111]
在此,在载荷补偿装置1中,设为作用于第四连杆150的载荷变为了m'g。
[0112]
此时,按照式(3),计算出与载荷m'g对应的新的变速比(增益)α1',操作者将变速器232a的变速比(增益)设定为计算出的值α1'。
[0113]
同样地,按照式(4),计算出与载荷m'g对应的新的变速比(增益)α2',操作者将变速器232b的变速比(增益)设定为计算出的值α2'。
[0114]
于是,基于变速器232a的输出α1'f1的转矩与由第一连杆120的自重、第四连杆150的自重以及物体作用的载荷产生的绕点o1的转矩互相平衡,在第一连杆120中,能够对应于应该补偿的载荷的变化实现载荷补偿。
[0115]
另外,基于变速器232b的输出α2'f2的转矩与由第四连杆150的自重及物体作用的载荷产生的绕点o2的转矩互相平衡,在第四连杆150中,能够对应于应该补偿的载荷的变化实现载荷补偿。
[0116]
即,能够实现具有更高便利性的载荷补偿装置1。
[0117]
如上所述,本发明所涉及的载荷补偿装置1具备支承部10(110)、第一连杆20(120)、线60(210a)以及扭矩赋予部80(230)。
[0118]
第一连杆20(120)相对于在支承部10(110)中成为支点的旋转中心o,在一端侧作用有成为负荷的物体的重量,并且在另一端侧输入有用于载荷补偿的力。
[0119]
线60(210a)架设在第一连杆20(120)的支点位置和输入用于载荷补偿的力的位置,从第一连杆20(120)的支点位置和输入用于载荷补偿的力的位置向铅垂下方延伸,并且一端被固定。
[0120]
扭矩赋予部80(230)赋予用于卷绕线60(210a)的另一端的转矩。
[0121]
由此,能够利用经由线60(210a)输入到第一连杆20(120)的另一端侧的来自扭矩赋予部80(230)的转矩赋予与作用于第一连杆20(120)的一端侧的负荷平衡的力。
[0122]
因此,能够实现具有更高便利性的载荷补偿装置1。
[0123]
另外,第一连杆20(120)在一端侧作用有成为负荷的物体的重量,并且在另一端侧具备带轮50b(200b)。
[0124]
支承部10(110)在成为旋转中心o的旋转轴r1上以能够旋转的方式支承第一连杆20(120)的一端侧与另一端侧之间,并且具备与旋转轴r1同轴设置的带轮50a(200a)。
[0125]
另外,支承部10(110)具备设置在带轮50a(200a)的铅垂下方、并以设定的转矩卷绕线60(210a)的线卷绕部70。
[0126]
线60(210a)的一端设置在第一连杆20(120)的带轮50b(200b)的铅垂下方,架设在带轮50a(200a)和带轮50b(200b)上,另一端侧卷绕在线卷绕部70(220a)上。
[0127]
另外,扭矩赋予部80(230)对线卷绕部70(220a)赋予用于卷绕线60(210a)的转矩。
[0128]
由此,能够将来自扭矩赋予部80(230)的转矩调节为在线卷绕部70(220a)设定的转矩。而且,利用调节好的转矩,能够实现与作用于第一连杆20(120)的一端侧的负荷的平衡。
[0129]
因此,能够实现具有更高便利性的载荷补偿装置1。
[0130]
另外,扭矩赋予部80(230)具备定扭矩弹簧81(231a、231b)和变速器82(232a、232b)。
[0131]
定扭矩弹簧81(231a、231b)输出恒定的转矩。
[0132]
变速器82(232a、232b)改变并输出由定扭矩弹簧81(231a、231b)输出的转矩。
[0133]
由此,能够通过简单的结构灵活地调节转矩的输出。
[0134]
另外,载荷补偿装置1具备第一连杆120(上连杆部件120a及下连杆部件120b)、第四连杆150(上连杆部件150a及下连杆部件150b)、第六连杆170、线210b、210c、线卷绕部220b以及扭矩赋予部230。
[0135]
第四连杆150(上连杆部件150a及下连杆部件150b)在一端侧作用有成为负荷的物体的重量,并且另一端侧以能够在旋转轴r6、r7上旋转的方式被支承在第一连杆120(上连杆部件120a及下连杆部件120b)的一端侧,具备与旋转轴r6同轴设置的带轮200c。
[0136]
带轮200d被支承部110支承为能够在旋转轴r1上旋转。
[0137]
第六连杆170的一端侧与带轮200d连结,并且在另一端侧具备带轮200e。
[0138]
线210c架设在带轮200c和带轮200d之间,将第四连杆150(上连杆部件150a)和第六连杆170维持平行,并且进行绕旋转轴r6的第四连杆150(上连杆部件150a)的转矩和绕旋转轴r1的第六连杆170的转矩的传递。
[0139]
线210b的一端设置在第六连杆170的带轮200e的铅垂下方,架设在带轮200d和带轮200e上。
[0140]
线卷绕部220b设置在带轮200d的铅垂下方,以设定的转矩卷绕线210b的另一端。
[0141]
扭矩赋予部230对线卷绕部220b赋予用于卷绕线210b的转矩。
[0142]
由此,能够可变地补偿在串联连接的各个连杆中应补偿的载荷,因此能够实现具有更高便利性的载荷补偿装置1。
[0143]
此外,在上述实施方式中,以将物体放置在载物台s上的情况为例进行了说明,但是根据本发明,作为补偿载荷的对象不限于将物体放置在载物台s上的情况。即,可以将本发明应用于能够通过装卸式或螺纹固定等来更换前端部分的部件或负载的系统(例如能够设置各种遮断杆的手动式遮断机等)。
[0144]
另外,本发明具有不需要电源就能够适当地调节补偿的载荷的结构,因此能够在广泛的状况下利用。
[0145]
例如,能够将本发明应用于农业作业中的堆垛作业、向卡车装货台的装载作业、货物打包作业、残疾人用车辆中的乘降辅助、或辅助站立的椅子等。
[0146]
此外,可以将弹性部件分割成多个来设置,或者将一个连杆或支承部10、110等部件分割成多个来设置,只要能够发挥与上述实施方式中所示的载荷补偿装置1的连杆结构实质上相同的功能即可。
[0147]
此外,上述实施方式示出了应用了本发明的一个例子,并不限定本发明的技术范
围。即,在不脱离本发明的主旨的范围内,本发明能够进行省略或置换等各种变更,可以采用上述实施方式以外的各种实施方式。本发明能够采用的各种实施方式及其变形包含在权利要求书所记载的发明及其等同范围内。
[0148]
【符号说明】
[0149]
1、载荷补偿装置;10、110支承部;11、111支柱部;12、112、113滑动机构;12a、12b、112a、112b、113a、113b直线导轨;20、120第一连杆;30、130第二连杆;40、140第三连杆;50a、50b、200a~200e带轮;60、210a~210c线;70、220a、220b线卷绕部;80、230扭矩赋予部;81、231a、231b定扭矩弹簧;82、232a、232b变速器;s载物台;150第四连杆;160第五连杆;170第六连杆;180第七连杆;190第八连杆;120a、150a上连杆部件;120b、150b下连杆部件;r1~r9旋转轴。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。