技术特征:
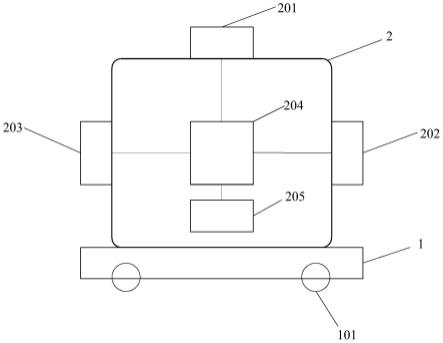
1.一种智能伴宠机器人,其特征在于,包括:底盘和机体,所述底盘用于承载所述机体;所述底盘安装有移动装置,用于实现所述智能伴宠机器人的移动;所述机体外部设置有可转动的摄像头、激光雷达和双向通讯喇叭,所述摄像头用于采集图像数据,所述激光雷达用于采集雷达数据,所述双向通讯喇叭包括拾音器和麦克风;所述机体内部设置有处理器和无线通信模块,所述摄像头、所述激光雷达、所述双向通讯喇叭和所述无线通信模块均与所述处理器连接;所述无线通信模块用于将所述摄像头采集到的图像数据和/或所述拾音器采集到的音频数据发送至所述智能伴宠机器人的客户端;所述双向通讯喇叭用于实现用户与宠物的对讲;所述处理器用于:根据接收到的雷达数据采用gmapping算法生成二维地图,并采用蒙特卡洛算法确定所述智能伴宠机器人的当前位置;当根据从所述感应器接收到的图像数据识别到所述摄像头范围内有宠物时,确定宠物的当前位置;将所述智能伴宠机器人的当前位置作为起始点,将宠物的当前位置作为目标终点,采用a-star算法基于所述二维地图进行全局路径规划,生成移动路径;控制所述移动装置按照所述移动路径移动所述智能伴宠机器人,以将所述智能伴宠机器人移动至宠物附近。2.根据权利要求1所述的智能伴宠机器人,其特征在于,所述处理器还用于:当根据从所述感应器接收到的图像数据确定宠物不在所述摄像头范围内时,响应于接收到的寻宠指令,控制所述拾音器采集宠物的音频数据;根据所述音频数据采用广义互相关-相位变换算法确定波达方向和距离,并根据所确定的波达方向和距离确定宠物的当前位置。3.根据权利要求2所述的智能伴宠机器人,其特征在于,所述处理器还用于:控制所述麦克风播放预先录制的宠物主人的声音信号或者实时语音通话中宠物主人的声音信号,以引导宠物发出声音或者靠近所述智能伴宠机器人。4.根据权利要求1所述的智能伴宠机器人,其特征在于,所述处理器还用于:当根据从所述感应器接收到的图像数据确定宠物不在所述摄像头范围内时,则采用全覆盖路径规划算法遍历所述二维地图上除障碍物以外的全部区域;在遍历过程中,对所述摄像头采集到的图像数据进行实时识别处理;若识别到宠物,则停止遍历,确定宠物的当前位置,并在所述二维地图中标记宠物的当前位置和当前时间。5.根据权利要求4所述的智能伴宠机器人,其特征在于,所述处理器还用于:根据多次遍历过程中所标记的宠物位置和对应的时间,生成宠物在各个时间段中所处位置的概率分布图;在接收到寻宠指令时,根据所述概率分布图将当前时间对应的时间段中各个位置按照概率高低依次确定为目标终点,进行导航。6.根据权利要求1所述的智能伴宠机器人,其特征在于,所述机体外部安装有显示装置,用于显示预先录制的宠物主人的视频信号或者实时视频通话中宠物主人的视频信号。
7.根据权利要求1所述的智能伴宠机器人,其特征在于,所述机体的顶部设置有水平转动的万向头,所述摄像头连接在所述万向头上。8.根据权利要求1所述的智能伴宠机器人,其特征在于,所述移动装置包括4个舵轮和4个驱动轮,所述驱动轮底部等高设置,用于实现全向移动。9.根据权利要求1所述的智能伴宠机器人,其特征在于,所述机体设有储粮装置,用于储存宠物粮食;所述机体的顶部设有储粮自锁按钮,用于控制所述储粮装置的弹出和收回。10.根据权利要求9所述的智能伴宠机器人,其特征在于,所述底盘的底部设有食盆,所述食盆可伸出地与所述底盘连接;所述食盆与所述储粮装置可连通设置;响应于放粮指令,从所述储粮装置向所述食盆中投放预定量的宠物粮食,并将所述食盆伸出。
技术总结
本发明提供一种智能伴宠机器人,包括:底盘和机体;底盘安装有移动装置;机体外部设置有可转动的摄像头、激光雷达和双向通讯喇叭,摄像头用于采集图像数据,激光雷达用于采集雷达数据;机体内部设置有处理器和无线通信模块;无线通信模块用于将图像数据和/或音频数据发送至智能伴宠机器人的客户端;双向通讯喇叭用于实现对讲;处理器用于根据雷达数据生成二维地图,并采用蒙特卡洛算法确定智能伴宠机器人的当前位置;采用A-star算法基于二维地图进行全局路径规划,生成移动路径;控制移动装置按照移动路径移动智能伴宠机器人至宠物附近。本发明提供的智能伴宠机器人可以更好地实现主人不在家时对宠物的监护。现主人不在家时对宠物的监护。现主人不在家时对宠物的监护。
技术研发人员:骆润卿 张双彪 陈晨 佘怡欣 游凯卉
受保护的技术使用者:北京信息科技大学
技术研发日:2022.10.08
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。