基于ccd的自动准直和盲区探测的激光雷达系统及方法
技术领域
1.本发明属于激光雷达的技术领域,尤其涉及一种基于ccd的自动准直和盲区探测的激光雷达系统及方法。
背景技术:
2.激光雷达作为近年来热门的大气探测光学遥感技术,常用于大气遥感、气候等环境监测领域,根据探测原理不同激光雷达可分为米散射激光雷达、偏振激光雷达、拉曼散射激光雷达、差分吸收激光雷达、高分谱分辨率激光雷达等,这些激光雷达是大气探测激光雷达的主要形式,在大气温度、湿度、气溶胶、云、沙尘、霾等气候和环境监测领域发挥着越来越重要的作用。
3.而激光雷达是一种高精密光学探测系统,激光的发射与信号接收对元件、光束质量和光轴的平行度要求比较高,如果发射系统与接收系统光轴产生相互偏离,此时激光雷达的探测结果会有较大的测量误差升值导致探测数据不可,所以为了保证激光雷达测量数据和可靠性,在正式探测之前需要进行接收光路与发射光路的准直,使收发光路平行。
4.在大多数情况下,实验室多采用人工调整的方法进行激光雷达收发系统准直,这就会对操作人员的专业知识和仪器使用熟练程度有较高的要求。传统的人工调整方法偏向于依靠操作人员的个人经验,不同情况或不同的操作人员进行准直的结果也会不同,甚至有较大差异,从而带来系统误差,有时发射光轴偏离较大,此时接收系统会无法接收到回波信号,人工调整方法会有一定的盲目性,准直过程会浪费较多时间。激光雷达工作情况多种多样,可能会经常进行装卸运送在特殊地区进行外场探测,有的也会装置与车内作为大气巡航车的一部分,长时间的在不平整的路面上运行,会使得激光雷达内部机械机构改变,这对需要精密的准直光路来说是严重,因此需要一种能够实现激光雷达自动准直的装置来避免上述情况。
5.在激光雷达自动准直的研究中使用较多的是回波信号强度法。1988年意大利的materia无压力研究所成果研制了一台自准直激光雷达,其在系统始终加入了一个高精度的二维电动调整架改变激光发射方向,通过软件控制使激光束做螺旋式扫描或十字形扫描,在后端监测高空大气回波信号强度达到最大的位置来决定最佳发射光束方向,即准直方向。回波信号法结构简单,易于实现,但该方向依赖回波信号,受大气波动影响较大,同时对控制激光束移动的步进电机精度误差要求较高。
6.除此之外,还有一种方法是使用光斑自动准直法,2008年中科院安徽光机所谭锟等人研制了基于这种方法的自动准直激光雷达系统。首先利用反射片使出射激光垂直返回望远镜,在望远镜后的小孔末端放置ccd来记录此时已准直的光斑位置,当激光雷达系统在工作过程中回波信号偏离准直光斑位置,此时通过电机调整激光发射方向来使回波信号光斑与标定位置重合。光斑自动准直法不依赖于回波信号,所以不受大气波动影响,但此方法设计的光路结构更加复杂,成本较高。
7.大多数激光雷达采用同轴结构或异轴结构,无论哪一种结构,都会存在不同程度
的望远镜视场盲区和过渡区,位于盲区的高度内,望远镜将无法探测到相应的激光回波信号;位于过渡区的高度内,望远镜只能接收到部分相应的激光回波信号。这一特性几乎每一台激光雷达都会存在。对于扩大望远镜有效探测距离即降低探测盲区,可以通过调整激光出射的发散角,扩大激光发散角,可使系统的探测盲区降低但同时会增大过渡区的距离,对望远镜同样有这种现象。因此如何解决激光雷达系统的探测盲区也是一个问题。
8.以上介绍的是激光雷达存在的准直问题和探测盲区问题,准直问题直接影响到激光雷达是否能正确的接收到激光的回波信号,回波信号是否可用;探测盲区问题涉及到激光雷达对低空范围内信号的无法接收。
技术实现要素:
9.为了能自动准直且缩小探测盲区,本发明提出了一种基于ccd的自动准直和盲区探测的激光雷达系统及方法,具体技术方案如下:
10.基于ccd的自动准直和盲区探测的激光雷达系统,包括光束接收单元,所述光束接收单元包括望远镜,设置在望远镜内部的半反射镜、所述望远镜侧面设置有ccd,所述半反射镜的中心与望远镜光轴一致,且可将光束反射到ccd上。
11.具体地说,所述光束接收单元还包括设置在望远镜外的沿光路依次设置的光阑、准直透镜、第二反射镜、探测器组件。
12.具体地说,所述望远镜主镜到次镜距离l1,次镜到半反镜距离l2,半反镜到ccd距离l3,望远镜焦距f,l1 l2 l3-f在设定阈值内。
13.具体地说,半反射镜安装在距离望远镜主镜高度1/3处。
14.具体地说,还包括光束发射单元,所述光束发射单元包括激光器、扩束器、第一反射镜,所述第一反射镜设置在调整架,所述调整架用于调整第一反射镜的位置和角度。
15.具体地说,述调整架为电动调整架,驱动端与驱动器连接,所述驱动器的受控端与控制处理单元连接。
16.具体地说,所述控制处理单元与探测器组件、ccd对应端口连接,所述控制处理单元还与激光器的受控端连接。
17.具体地说,所述控制处理单元为工控机,所述探测器组件包括探测器和采集卡,所述采集卡与控制处理单元连接。
18.具体地说,驱动器与电动调整架对激光角度精度控制为40μrad。
19.使用上述基于ccd的自动准直和盲区探测的激光雷达系统的方法,包括以下步骤:
20.s1、在激光雷达工作前预先设计激光返回光路,使得初设激光返回望远镜,此时ccd接收到的激光光斑位置为准直时的位置;
21.s2、激光雷达位置发生改变后,在激光雷达工作时,控制处理单元接收探测器组件和ccd的信号,通过判断光斑位置是否发生改变来判断收发光路是否偏离,当偏离时,控制处理单元控制第一反射镜的位置和角度,直至光斑回到既定准直区域,完成激光雷达的自动准直。
22.本发明的优点在于:
23.(1)本技术中ccd实现两个功能:一是对激光雷达的盲区探测;探测信号可与激光雷达系统探测信号进行信号高度拼接,实现激光雷达系统无盲区信号探测。二是实现激光
雷达的自动准直功能;依据光斑自动准直方法,ccd可以判断光斑成像位置,从而为调整准直提供依据。ccd通过望远镜中的半反射镜扩大探测角度,可以实现更低高度的大气探测和在激光光轴在大角度偏转下的有效探测。
24.(2)本发明具有精度高、无人值守、可有效扩大激光雷达系统的有效探测距离等优点。
25.(3)所述ccd实现激光雷达自动准直原理是基于光斑准直方法,在激光雷达工作前预先设计激光返回光路,使得出射激光返回至望远镜,此时可以认为 ccd接收到的激光光斑位置为准直时的位置。在激光雷达工作时,当出现颠簸或其他情况引起收发光路偏离时,光斑位置将发生改变,工控机于这种情况下,向驱动器发出指令,控制电动调整架调整激光出射角度,当光斑回到既定准直区域时,停止移动电动调整架,完成激光雷达自动准直。
26.(4)ccd用于对盲区信号进行接收和对收发光路是否准直进行判断适用性强,可用于多套激光雷达系统;且光路设计不复杂,可维修性强。
27.(5)半反射镜安装在距离望远镜主镜高度1/3处,这样可以有效避免从主镜发射到次镜的光信号被半反射镜遮挡。
附图说明
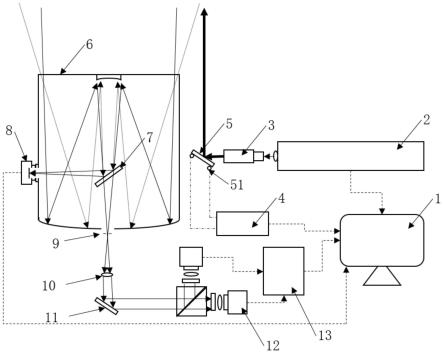
28.图1为基于ccd的自动准直和盲区探测激光雷达系统设计原理图;
29.图2为基于ccd的激光雷达盲区探测原理示意图;
30.图3ccd探测回波信号与激光雷达探测信号对比图;
31.图4为激光雷达系统探测盲区、过渡区、充满区示意图。
32.图中:
33.1、工控机;2、激光器;3、扩束器;4、驱动器;5、第一反射镜;51、电动调整架;6、望远镜;7、半反射镜;8、ccd;9、光阑;10、准直透镜;11、第二反射镜;12、探测器;13、采集卡。
具体实施方式
34.如图1所示,一种基于ccd的自动准直和盲区探测的激光雷达系统,包括光束发射单元、光束接收单元、控制处理单元。所述控制处理单元为工控机1。
35.所述光束发射单元包括激光器2、扩束器3、第一反射镜5,所述第一反射镜5设置在调整架,所述调整架用于调整第一反射镜5的位置和角度。在该方案中,所述调整架为电动调整架51,驱动端与驱动器4连接,所述激光器2和驱动器4的受控端均与控制处理单元对应端口连接。驱动器4与电动调整架51 对激光角度精度控制为40μrad,自动准直过程可在40s内完成。
36.所述光束接收单元包括望远镜6,设置在望远镜6内部的半反射镜7、所述望远镜6侧面设置有ccd8,所述半反射镜7的中心与望远镜6光轴一致,且可将光束反射到ccd8上。在望远镜6输出端沿光路依次还设置有光阑9、准直透镜10、第二反射镜11、探测器组件。所述探测器组件包括探测器12和采集卡 13。所述采集卡13和ccd8的数据端均与控制处理单元的对应端口连接。所述望远镜6主镜到次镜距离l1,次镜到半反镜距离l2,半反镜到ccd8距离l3,望远镜6焦距f,l1 l2 l3-f在设定阈值内。其中最优的方案为l1 l2 l3=f 5mm,半反射镜7安装在距离望远镜6主镜高度1/3处。
37.如图2和图4所示,盲区探测是基于激光雷达存在探测盲区而设计的,对不同型号的激光雷达来说,由于激光器2的发散角与望远镜6的视场角参数不同,会存在探测盲区、过渡区、充满区这三个高度区域,探测盲区是指基于雷达的高度至一定的高度内,望远镜6无法接收到来自激光器2的回波信号,这样自然无法对此区域内的大气条件进行判断,我们在专利中使用添加半反射镜7 来实现这一目的,由图2可知,半反射镜7所能接受光的角度较望远镜6的视场角来说增大了δγ,而根据盲区高度公式:
[0038][0039]
式中z为探测高度,θ
t
和θr分别为激光的出射半角和望远镜6的接收视场半角,l为接收系统与发射系统的间距,dr和d
t
分别为发射系统与接收系统的底端剖面直径,我们根据公式1可以计算出激光雷达探测系统的盲区高度,而使用 ccd8进行盲区探测,可得:
[0040]
δz≈δγ
·rꢀꢀ
(2)
[0041]
式中r可由三角关系算出,激光雷达的盲区可借由ccd8缩减δz高度,我们有图3可以看出ccd8探测回波信号与望远镜6进行探测时的差异,对于一定高度以下,望远镜6无法接收到来自激光的回波信号,因此信号强度衰减很大,而ccd8不受高度影响可完成低区域的信号探测,我们使用工控机1对激光雷达探测信号与ccd8探测信号进行信号拼接,以实现激光雷达系统更广的探测范围。
[0042]
使用上述一种基于ccd的自动准直和盲区探测的激光雷达系统的方法,包括以下步骤:
[0043]
s1、在激光雷达工作前预先设计激光返回光路,使得初设激光返回望远镜6,此时ccd8接收到的激光光斑位置为准直时的位置;
[0044]
s2、激光雷达位置发生改变后,在激光雷达工作时,控制处理单元接收探测器组件和ccd8的信号,通过判断光斑位置是否发生改变来判断收发光路是否偏离,当偏离时,控制处理单元控制第一反射镜5的位置和角度,直至光斑回到既定准直区域,完成激光雷达的自动准直。
[0045]
从图3的ccd8探测回波信号与激光雷达探测信号对比图可以看出,在将两个信号归一化处理后,两种方式探测的大气回波信号在0.5km~1km区间吻合得很好,激光雷达由于方式由于过渡区和盲区的存在,0.5km以下信号值很小(该信号非真实大气信号),而用ccd8探测到回波信号与理论实际趋势一致,ccd8 探测回波信号对激光雷达探测信号做了很好的补充。
[0046]
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造,凡在本发明创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
