技术特征:
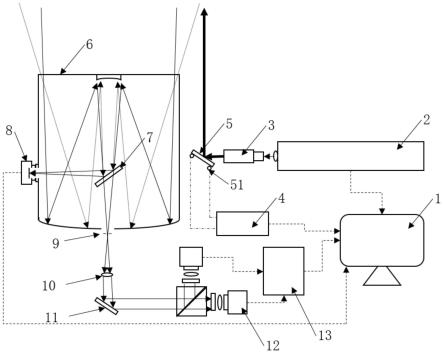
1.基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,包括光束接收单元,所述光束接收单元包括望远镜(6),设置在望远镜(6)内部的半反射镜(7)、所述望远镜(6)侧面设置有ccd(8),所述半反射镜(7)的中心与望远镜(6)光轴一致,且可将光束反射到ccd(8)上。2.根据权利要求1所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,所述光束接收单元还包括设置在望远镜(6)外的沿光路依次设置的光阑(9)、准直透镜(10)、第二反射镜(11)、探测器(12)组件。3.根据权利要求1所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,所述望远镜(6)主镜到次镜距离l1,次镜到半反镜距离l2,半反镜到ccd(8)距离l3,望远镜(6)焦距f,l1 l2 l3-f在设定阈值内。4.根据权利要求1-3任意一项所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,半反射镜(7)安装在距离望远镜(6)主镜高度1/3处。5.根据权利要求1所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,还包括光束发射单元,所述光束发射单元包括激光器(2)、扩束器(3)、第一反射镜(5),所述第一反射镜(5)设置在调整架,所述调整架用于调整第一反射镜(5)的位置和角度。6.根据权利要求5所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,所述调整架为电动调整架(51),驱动端与驱动器(4)连接,所述驱动器(4)的受控端与控制处理单元连接。7.根据权利要求6所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,所述控制处理单元与探测器(12)组件、ccd(8)对应端口连接,所述控制处理单元还与激光器(2)的受控端连接。8.根据权利要求7所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,所述控制处理单元为工控机(1),所述探测器(12)组件包括探测器(12)和采集卡,所述采集卡与控制处理单元连接。9.根据权利要求7所述的基于ccd的自动准直和盲区探测的激光雷达系统,其特征在于,驱动器(4)与电动调整架(51)对激光角度精度控制为40μrad。10.使用权利要求1-9任一项所述的基于ccd的自动准直和盲区探测的激光雷达系统的方法,其特征在于,包括以下步骤:s1、在激光雷达工作前预先设计激光返回光路,使得初设激光返回望远镜(6),此时ccd(8)接收到的激光光斑位置为准直时的位置;s2、激光雷达位置发生改变后,在激光雷达工作时,控制处理单元接收探测器(12)组件和ccd(8)的信号,通过判断光斑位置是否发生改变来判断收发光路是否偏离,当偏离时,控制处理单元控制第一反射镜(5)的位置和角度,直至光斑回到既定准直区域,完成激光雷达的自动准直。
技术总结
本发明属于激光雷达的技术领域,尤其涉及一种基于CCD的自动准直和盲区探测的激光雷达系统及方法。系统包括光束接收单元,所述光束接收单元包括望远镜,设置在望远镜内部的半反射镜、所述望远镜侧面设置有CCD,所述半反射镜的中心与望远镜光轴一致,且可将光束反射到CCD上。该发明的优点在于:CCD实现两个功能:一是对激光雷达的盲区探测;探测信号可与激光雷达系统探测信号进行信号高度拼接,实现激光雷达系统无盲区信号探测。二是实现激光雷达的自动准直功能;依据光斑自动准直方法,CCD可以判断光斑成像位置,从而为调整准直提供依据。CCD通过望远镜中的半反射镜扩大探测角度,可以实现更低高度的大气探测和在激光光轴在大角度偏转下的有效探测。偏转下的有效探测。偏转下的有效探测。
技术研发人员:刘东 况志强 王来彬 刘本利 邓迁 于彩霞 李乘 吴德成 王珍珠
受保护的技术使用者:中国科学院合肥物质科学研究院
技术研发日:2022.10.08
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。