技术特征:
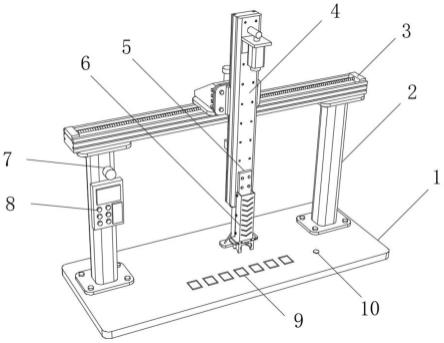
1.一种工业机械臂,包括平台(1),其特征在于:所述平台(1)的顶端两侧均固定连接有立柱(2),所述立柱(2)的顶端固定连接有电动滑轨(3),所述电动滑轨(3)的驱动端安装有定位座(25),所述定位座(25)的顶端安装有安装座(11),所述安装座(11)的前端固定连接有直线电机(4),所述直线电机(4)的前端底部固定连接有安装板(5),所述安装板(5)前端固定连接有液压缸(15),所述安装板(5)的底端固定连接有基座(16),所述基座(16)的底端两侧均设置有t型槽(20),所述t型槽(20)的内部均滑动连接有t型块(21),所述t型块(21)的底端均固定连接有夹爪(22),所述液压缸(15)的驱动端固定连接有活动块(17),所述活动块(17)的左右两侧外壁均转动连接有四个传动板(24),同侧所述传动板(24)远离活动块(17)的一端均转动连接在相应夹爪(22)的顶部,左侧所述夹爪(22)的左端固定连接有超声波传感器(18),所述直线电机(4)的后端底部固定连接有套管(13),所述套管(13)的内部滑动连接有触杆(14),所述直线电机(4)的后端对应触杆(14)的上方固定连接有电源按钮(12)。2.根据权利要求1所述的一种工业机械臂,其特征在于:所述活动块(17)的底端中部安装有红外定位器(19),所述平台(1)的顶端右侧固定连接有反光定位片(10),所述平台(1)的顶端中部设置有放置区(9)。3.根据权利要求1所述的一种工业机械臂,其特征在于:所述触杆(14)的杆体中部固定连接有下限位块(31),所述下限位块(31)的顶端固定连接有弹簧(33),所述弹簧(33)的顶端固定连接在套管(13)的顶端内壁,所述触杆(14)的杆体顶部对应触杆(14)的外部固定连接有上限位块(32),所述触杆(14)的底端固定连接有安全触板(34),所述安全触板(34)的垂直高度低于夹爪(22)的垂直高度。4.根据权利要求1所述的一种工业机械臂,其特征在于:所述定位座(25)的顶端设置有定位槽(26),所述定位槽(26)的宽度与安装座(11)的宽度相适配,所述安装座(11)的底端前方固定连接有卡板(28),所述安装座(11)的内部滑动连接有插杆(29),所述插杆(29)的顶端内壁固定连接有拉簧(30),所述拉簧(30)的底端固定连接在安装座(11)的顶端,所述定位座(25)的顶端对应插杆(29)的下方设置有插槽(27)。5.根据权利要求1所述的一种工业机械臂,其特征在于:所述夹爪(22)的相对一端均固定连接有若干橡胶条(23),所述安装板(5)的前端对应液压缸(15)的位置处固定连接有防护罩(6)。6.根据权利要求1所述的一种工业机械臂,其特征在于:左侧所述立柱(2)的前端固定连接有控制器(8),左侧所述立柱(2)的前端顶部固定连接有报警灯(7),所述报警灯(7)、电动滑轨(3)、直线电机(4)、超声波传感器(18)和电源按钮(12)均与控制器(8)电性连接。7.根据权利要求1所述的一种工业机械臂及其使用方法,其特征在于:根据权利要求1-6任意一项所述的一种工业机械臂,包括以下步骤:s1.通过控制器(8)驱动电动滑轨(3),电动滑轨(3)带动夹爪(22)向右滑动,当活动块(17)底部的红外定位器(19)运动到反光定位片(10)的位置时,红外定位器(19)发出的红外光被反光定位片(10)反射,控制器(8)接收到红外定位器(19)的反馈信号并将该点设置为原点;s2.夹爪(22)定位后通过控制器(8)的内部程序对电动滑轨(3)与直线电机(4)进行控制使夹爪(22)运动至放置区(9)的工业零件对应的位置处,通过驱动液压缸(15)带动活动
块(17)向上运动并带动传动板(24)收拢,从而带动t型块(20)滑动使夹爪(22)对工件夹紧;s3.当夹爪(22)距离平台面过近时,通过超声波传感器(18)对距离进行监测并反馈至控制器(8),控制器(8)将控制直线电机(4)的电路断开,直线电机(4)停止工作,夹爪(22)停止向下运动;s4.当s3中的超声波传感器(18)或控制器(8)控制直线电机(4)的电路故障时,通过安全触板(34)接触平台并带动触杆(14)向上运动关闭电源按钮(12),通过电源按钮(12)直接控制直线电机(14)断电,能够在夹爪(22)接触到平台(1)之前停止其运动;s5.夹持完成后通过直线电机(14)完成夹爪(22)的提升,并通过电动滑轨(3)带动夹爪(22)将工件转移至指定位置处;s6.完成一套夹取工作后,电动滑轨(3)带动夹爪(22)复位至s1中的原点处。8.根据权利要求7所述的一种工业机械臂及其使用方法,其特征在于:还包括直线电机(4)的安装方法,将安装座(11)的卡板(28)卡入定位座(25)的定位槽(26)处并推入直至拉簧(30)带动插杆(29)插入插槽(27)内即可完成直线电机(4)的安装。
技术总结
本发明提供一种工业机械臂及其使用方法,涉及机械手臂技术领域。该工业机械臂,包括平台,所述平台的顶端两侧均固定连接有立柱,所述立柱的顶端固定连接有电动滑轨,所述电动滑轨的驱动端安装有定位座,所述定位座的顶端安装有安装座,所述安装座的前端固定连接有直线电机,所述直线电机的前端底部固定连接有安装板,所述安装板前端固定连接有液压缸,所述安装板的底端固定连接有基座,所述基座的底端两侧均设置有T型槽,所述T型槽的内部均滑动连接有T型块。通过双重防呆设置能够有效防止夹爪因操作不当与平台抵触造成机械损坏的问题并且设置红外定位保证每次执行任务时机械爪不会因为累积误差造成的最后的夹取偏差。会因为累积误差造成的最后的夹取偏差。会因为累积误差造成的最后的夹取偏差。
技术研发人员:张建顺 张宸瑞 陈萧
受保护的技术使用者:山东源顺智能科技有限公司
技术研发日:2022.10.08
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。