:
1.本发明涉及交通安全与管理领域,尤其涉及一种信号交叉口人车博弈冲突风险评估与预警方法。
背景技术:
2.城市交叉口汇集了涉及多种道路使用者的异质交通流,因此交通冲突频繁且严重性高,尤其是针对过街行人与机动车之间的冲突问题,考虑到行人是交通弱势参与者,如何评估和降低行人与机动车之间的冲突风险是当前交通安全领域研究的重要问题。
3.交叉口机动车与行人之间的冲突分为左转弯交通冲突、右转弯交通冲突和穿越交通冲突。举例而言,对于无右转专用相位的信号控制交叉口,即使人行横道为绿灯,但由于右转车辆存在视觉盲区,行人与机动车之间的冲突仍然很严重(如图1所示)。以南京市为例,仅2021年南京全市共发生涉及大型车辆右转未让行事故37起,共造成24人死亡,15人受伤。为此,多座城市的交通管理部门针对大型车辆出台管控措施,如部分城市规定大型车驾驶员右转必停,在路边设置警示标志等。但目前的管控措施主要以约束驾驶员行为和倡导道路使用者提高自我警觉和风险意识为主,在一定程度上忽视了驾驶人和行人交互行为发生机制,因而存在一定的缺陷。
4.相关研究和专利针对风险评估,主要通过静态交通安全替代指标,依赖精细化的轨迹数据进行人车交互行为的建模和评估,但该类方法的问题在于,未能深度刻画行人与驾驶人在交叉口的潜在交互与复杂博弈的过程,一定程度上忽略了博弈行为与冲突量化之间同步演变的关系。
5.基于现有技术的不足,本发明需要提出一种考虑人车动态博弈冲突演化机理的风险的信号交叉口人车博弈冲突风险评估,并根据风险评估的结果,设计了一种有针对性的行人过街预警系统。
技术实现要素:
6.为了弥补现有技术问题的不足,本发明的目的是提供一种信号交叉口人车博弈冲突风险评估,涵盖了博弈双方的动态反馈机制以及行为-风险双向影响机制的内在特点,解决现有评估方法忽视驾驶人和行人交互行为发生机制的这一缺陷,另外,本技术的的技术根据风险评估的结果,设计了一种有针对性的行人过街预警系统,能够实时识别出关键风险节,并给出预警。
7.本发明的技术方案如下:
8.一种信号交叉口人车博弈冲突风险评估方法,包括以下步骤:
9.(1)获取交叉口驾驶员与行人的交互行为的视频数据;
10.(2)根据步骤(1)中的视频数据,获取道路基本参数以及影响驾驶行为与过街行为的相关变量数据;
11.(3)定义驾驶员的决策集s
驾驶员
={让行,不让行},行人的决策集s
行人
={过街,不过
街},确定决策行为的风险等级划分标准,以及不同风险等级下的冲突风险指标;
12.(4)根据量子响应均衡博弈理论,从步骤(2)中筛选出影响驾驶人与行人各决策的解释变量,并利用期望效用理论建立驾驶人与行人各决策的期望效用函数;
13.(5)对步骤(4)中的各解释变量进行筛选,作为影响驾驶人与行人各决策的关键变量,筛选的标准为:各个变量之间的pearson相关系数小于0.5,且根据boostrap采样t检验,变量的均值在5%的水平上;将筛选出来的关键变量带入相应的期望效用函数中,获得收益值,进而得出驾驶人与行人决策收益矩阵;
14.(6)根据步骤(5)中得到的驾驶人与行人决策收益矩阵,得到logit-qre形式的行人的过街概率p
过街
、驾驶人让行的概率p
让行
;
15.(7)驾驶行为与过街行为的博弈过程为多次的序列过程,且次序相关性,将每一个先后发生的博弈过程定义为马尔可夫随机过程,人车交互博弈过程时间和状态都离散,人车博弈过程在时刻第n次博弈所处的状态为已知的条件下,第n-1次博弈所处的状态仅与第n次博弈有关,而与第n次博弈之前没有关系,因此,得到第n次博弈的行人的过街概率p
过街
(n),驾驶人让行的概率p
让行
(n);
16.(8)在基准风险等级前提下,第n次博弈过程中,决策行为组合的风险概率的函数为:p
潜在冲突
=p
过街
(n)
×
(1-p
让行
(n));
17.(9)在考虑不同风险等级前提下,确定第n次博弈的决策行为的风险等级以及冲突风险指标,决策行为组合的风险概率的函数为:
18.f=f(p
潜在冲突
,k)=k*p
潜在冲突
,
19.基于该风险概率函数可量化交互过程中各阶段可能发生的决策行为的风险水平。
20.步骤(2)中获取道路基本参数以及影响驾驶行为与过街行为的相关变量数据,具体包括:
21.获取交通量、密度、速度、车头时距、饱和度、通行能力和车头间距的参数,以及行人过街前后一定时间内周边过街和等待的行人数,行人流密度、过街速度。
22.步骤(3)中是根据pet的阈值将决策行为风险划分为3个风险等级,具体如下:
23.计算冲突双方到达冲突点的时间差值pet:
[0024][0025]
其中,tta
车辆
和tta
行人
是车辆和行人到达冲突区域的时间,d
车辆
和d
行人
是车辆和行人到冲突区域的距离,v
车辆
和v
行人
分别是车辆速度和行人的行走速度;
[0026]
当pet》6s时,此时决策行为风险是可忽略的,k=0;
[0027]
当2.5≤pet≤6s时,此时决策行为风险为中等,k=1;
[0028]
当pet《2.5s,此时决策行为风险为严重等级,k=2;其中,k为冲突风险指标。
[0029]
步骤(4)中利用期望效用理论建立驾驶人与行人各决策的期望效用函数,具体如下:
[0030]
1)行人可以选择行为的期望效用函数表示为:
[0031]
eu
过街
=p
让行
×
au c1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1);
[0032]
eu
不过街
=bv c2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);
[0033]
2)驾驶员可以选择行为的期望效用函数表示为:
[0034]
eu
让行
=dm c3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3);
[0035]
eu
不让行
=(1-p
过街
)
×
ew c4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4);
[0036]
其中,u和v分别为行人过街与不过街的解释变量,m和w分别为驾驶员让行与不让行的解释变量;c1、c2、c3、c4为常数项;a、b、d、e为系数的向量;0≤p
让行
≤1分别为行人对驾驶员会让路的预期;0≤p
过街
≤1分别为驾驶员对行人会过马路的预期。
[0037]
步骤(6)中所述logit-qre形式的驾驶人让行的概率、行人的过街概率,具体如下:
[0038]
驾驶人让行的概率为:
[0039][0040]
行人的过街概率为:
[0041][0042]
步骤(6)中p
让行
与p
过街
相互嵌套,计算p
让行
与p
过街
需要进行一个迭代收敛的过程:
[0043]
采用极大似然估计法估计模型参数;δeu
过街
和δeu
让行
是行人决策和驾车员决策的潜在指数,
[0044]
δeu
过街
=eu
过街-eu
不过街
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7),
[0045]
δeu
让行
=eu
让行-eu
不让行
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8);
[0046]
进而构造行人决策的对数似然函数:
[0047][0048]
其中,a人过街效用方程的参数系数,yi=1表示行人选择动作{过街},yi=0表示行人选择动作{不过街},是logistic分布的累积分布函数;
[0049]
同理,可以构造驾驶员决策的对数似然函数:
[0050][0051]
其中,b为驾驶员让行效用方程的参数系数,yj=1表示驾驶员选择操作{让行},yj=0表示驾驶员选择操作{不让行};
[0052]
因此,用μ表示所有模型参数的向量,对数似然函数可以表示为:
[0053]
ll(μ;y;x)=ll
行人
(aw;y,x) ll
车辆
(aw;y,x)
ꢀꢀꢀꢀꢀꢀ
(11),
[0054]
期望最大化可以迭代地应用于logit qre的求解,p
让行
和p
过街
被认为是潜在变量,对于一对初始概率{p
过街,i
,p
让行,i
},通过最大化整个对数似然函数来生成μi,
[0055][0056]
对于μi,根据式(13)和式(14)生成新的概率对{p
过街,i
,p
让行,i
}:
[0057]
[0058][0059]
方程(12)-(14)可以迭代应用,直到{p
过街,i
,p
让行,i
}收敛。
[0060]
步骤(7)中第n次人车博弈的交互行为概率{p
过街
(n),p
让行
(n)}可由迭代得到的收敛的{p
过街
(n-1),p
让行
(n-1)}产生,令x为{p
过街
,p
让行
}的状态表征,可得到:
[0061]
p(xn=j|x
n-1
=i,x
n-2
=i
n-1
,...,x1=i0)=p(xn=j|x
n-1
=i)=p
ij
ꢀꢀꢀꢀ
(15),
[0062]
{p
过街
(n),p
让行
(n)}=p
ij
*{p
过街
(n-1),p
让行
(n-1)}
ꢀꢀꢀꢀꢀꢀ
(16)。
[0063]
一种基于风险评估方法的人车博弈冲突风险预警方法,包括以下步骤:
[0064]
(3.1)建立交叉口机动车与行人的交互行为的视频集,根据所述的信号交叉口人车博弈冲突风险评估方法对前述视频集进行评估,采用机器学习与数据挖掘的方法,获得关键风险节点数据样本集;
[0065]
(3.2)利用数据采集模块获取当前信号交叉口的视频数据,并将视频数据传输到数据分析处理模块;
[0066]
(3.3)利用数据分析处理模块对当前信号交叉口的视频数据进行分析处理,判断视频中存在或不存在与关键风险节点数据样本集中相匹配的关键风险节点,若存在相匹配的关键风险节点,对关键风险节点的类型进行判断,并确定采取的预警方式,则将判断结果传送给系统信号反馈单元;
[0067]
(3.4)系统信号反馈单元根据接收到的反馈信息,做出预警。
[0068]
所述的关键风险节点,包括以下三大类:
[0069]
(a)交互过程中存在明显行为突变的节点;
[0070]
(b)风险概率高且可调整的时间空间余量较少的节点;
[0071]
(c)风险概率较低但是后续交互过程风险增加的概率较高的节点。
[0072]
与现有技术相比,本发明具有以下优点:
[0073]
1、本发明基于量子响应均衡博弈理论,建立机动车与行人交叉口动态博弈模型,利用动态博弈模型反映博弈双方的动态反馈机制以及行为-风险双向影响机制的内在特点,解决现有技术当中对博弈行为与冲突量化之间同步演变的关系忽视,提高风险的评估的准确度。
[0074]
2、本发明基于信号交叉口人车博弈冲突风险评估方法,结合视频数据,探究人车博弈中的关键风险节,可以采用机器学习与数据挖掘的方法获得关键风险节的样本集,在此基础上,本发明还提出了人车博弈冲突风险的预警方法,利用实时采集的路口行人以及来向车辆交互行为数据与关键风险节的样本集的对比,可以快速、实时识别出关键风险节,并给出预警。
[0075]
3、本发明将关键风险节点分为三大类,针对于风险节点的类型,可以给出针对性的预警方式,一方面,有效地警醒需要对风险进行规避人群,提高对风险地规避效率,另一方面,提高了交叉口的通行效率。
[0076]
4、本发明基于风险评估结果,提出基于计算机视觉模型的交叉口行人过街实时预警系统设计方法,降低交警出勤造成的社会成本,提升机动车礼让行人的文明出行宗旨和理念,降低交通事故的发生率。
附图说明:
[0077]
图1为信号交叉口右转车辆与行人冲突的示意图。
[0078]
图2为本发明的方案流程图。
[0079]
图3为本发明行人过街预警系统流程图。
[0080]
图4为本发明基于计算机视觉模型的行人过街预警系统构架示意图。
具体实施方式:
[0081]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0082]
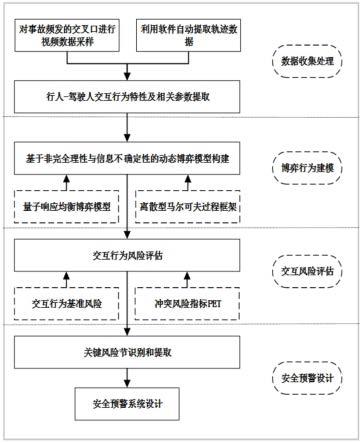
如图1、2所示,第一部分信号交叉口人车博弈冲突风险评估,主要有以下步骤:
[0083]
步骤一:对事故多发地进行视频录制。对事故多发地利用高清摄像机获取非高峰时段的视频数据,通过人工筛选出需要截取的视频片段(即冲突区域可能发生驾驶人与行人的交互的片段)。
[0084]
步骤二:车辆与行人的轨迹提取。采用计算机视觉模型yolo x、deepsort4.0进行自动识别提取。
[0085]
步骤三:道路基本参数以及驾驶行为与过街行为的获取。利用步骤二导出的轨迹数据获取交通量、密度、速度、车头时距、饱和度、通行能力和车头间距等参数,以及行人过街前后一定时间内周边过街和等待的行人数,行人流密度、过街速度。
[0086]
步骤四:机动车与行人交叉口动态博弈模型建立。博弈模型建立基于交叉口博弈双方行为的非完全理性与感知信息不确定性,采用博弈论“量子响应均衡理论”进行理论框架地构建,构建步骤如下:
[0087]
(1)定义决策策略集
[0088]
将s定义为博弈参与者的选择集,s1为驾驶人的选择集,s2为行人的选择集,规定博弈双方在交互过程中会采取最高效用的决策,并假定对方同样采取这样决策策略,同时考虑风险变化对于决策效益的负向影响。
[0089]
(2)构建博弈双方决策的效用方程与收益矩阵
[0090]
假设仅考虑驾驶人决策s
驾驶员
={让行,不让行},行人决策s
行人
={过街,不过街}。在量子响应均衡博弈理论中,参与者的感知受到误差的影响。因此,有限理性的行人和驾驶员的选择决策是随机的。这种决策是用期望效用理论建模的,根据该理论,一个参与者的效用依赖于另一个参与者的策略预期。
[0091]
1)行人可以选择行为的期望效用函数表示为:
[0092]
eu
过街
=p
让行
×
au c1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1),
[0093]
eu
不过街
=bv c2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2),
[0094]
2)驾驶员可以选择行为的期望效用函数表示为:
[0095]
eu
让行
=dm c3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3),
[0096]
eu
不让行
=(1-p
过街
)
×
ew c4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4),
[0097]
其中u和v分别为行人过街与不过街的解释变量,m和w分别为驾驶员让行与不让行的解释变量。c1、c2、c3、c4为常数项,a、b、d、e为系数的向量,0≤p
让行
≤1分别为行人对驾驶员会让路的预期,0≤p
过街
≤1分别为驾驶员对行人会过马路的预期。
[0098]
3)变量筛选与收益矩阵构建
[0099]
上文中解释变量是基于提取的轨迹数据所得的各类变量,需要对解释变量进行筛选和统计检验,筛选的标准为:各个变量之间的pearson相关系数小于0.5,其次,根据boostrap采样t检验,变量的均值在5%的水平上具有统计显著性。符合筛选标准的变量确定为关键变量。将筛选出来的关键变量带入期望效用函数,并组合构建得到收益矩阵,如下表所示;
[0100][0101]
(3)构建决策概率方程与求解算法
[0102]
根据所得到的收益矩阵,可以采用logit-qre形式的驾驶人让行的概率为:
[0103][0104]
以及行人的过街概率为:
[0105][0106]
由于p
让行
与p
过街
相互嵌套,这意味着两个概率之间有一个迭代收敛的过程。
[0107]
采用极大似然估计法估计模型参数。δeu
过街
和δeu
让行
是行人决策和驾车员决策的潜在指数。
[0108]
δeu
过街
=eu
过街-eu
不过街
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7),
[0109]
δeu
让行
=eu
让行-eu
不让行
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8),
[0110]
进而构造行人决策的对数似然函数:
[0111][0112]
其中,a人过街效用方程的参数系数,yi=1表示行人选择动作{过街},yi=0表示行人选择动作{不过街},是logistic分布的累积分布函数。
[0113]
同理,可以构造驾驶员决策的对数似然函数:
[0114][0115]
其中,b为驾驶员让行效用方程的参数系数,yj=1表示驾驶员选择操作{让行},yj=0表示驾驶员选择操作{不让行}。
[0116]
因此,用μ表示所有模型参数的向量,对数似然函数可以表示为:
[0117]
ll(μ;y;x)=ll
行人
(a;y,x) ll
车辆
(b;y,x)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11),
[0118]
期望最大化(em)可以迭代地应用于logit qre的求解。p
让行
和p
过街
可被认为是潜在
变量。对于一对初始概率{p
过街,i
,p
让行,i
},通过最大化整个对数似然函数来生成μi:
[0119][0120]
对于μi,根据式(13)和式(14)生成新的概率对{p
过街,i
,p
让行,i
}:
[0121][0122][0123]
方程(12)-(14)可以迭代应用,直到{p
过街,i
,p
让行,i
}收敛。
[0124]
(4)交互全过程博弈的离散框架构建
[0125]
将交互过程中博弈设定为多次序列过程,考虑到多次博弈过程的次序相关性,可将每一个先后发生的博弈过程定义为马尔可夫随机过程,由于人车交互博弈过程相关变量与动作状态均是离散的,因此是可将过程定义为马尔科夫链,其特点是人车博弈过程第n-1次博弈所处的状态为已知的条件下,在第n次博弈过程中所处的状态仅与第n-1次博弈有关,而与第n-1次博弈之前的时刻无关系。因此,第n次人车博弈的交互行为概率{p
过街
(n),p
让行
(n)}可由步骤(3)中迭代得到的收敛的{p
过街
(n-1),p
让行
(n-1)}产生,令x为{p
过街
,p
让行
}的状态表征,可得到:
[0126]
p(xn=j|x
n-1
=i,x
n-2
=i
n-1
,...,x1=i0)=p(xn=j|x
n-1
=i)=p
ij
ꢀꢀꢀꢀ
(15),
[0127]
{p
过街
(n),p
让行
(n)}=p
ij
*{p
过街
(n-1),p
让行
(n-1)}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16),
[0128]
步骤五:人车博弈行为的风险评估。首先根据不同决策行为的基准风险等级,以及当前状态下的冲突风险指标(pet-代表的是冲突双方到达冲突点的时间差值),
[0129][0130]
tta
车辆
和tta
行人
是车辆和行人到达(冲突区域)的时间,
[0131]d车辆
和d
行人
是车辆和行人到冲突区域的距离,
[0132]v车辆
和v
行人
分别是车辆速度和行人的行走速度。
[0133]
根据pet的阈值可将决策行为的风险等级划分出3个基准等级,相应地确定3个等级的冲突风险指标k:当pet》6s时,设定k=0,认为决策行为的风险是可忽略的:而当2.5s≤pet≤6s时,此时k=1,决策行为的风险为中等;当pet《2.5s,k=2,决策行为的风险为严重等级。
[0134]
接着,在考虑基准风险等级前提下,需要考虑危险交互行为的发生概率,以第n次博弈为例,即:
[0135]
p
潜在冲突
=p
过街
(n)
×
(1-p
让行
(n))
ꢀꢀꢀꢀꢀꢀꢀ
(18),
[0136]
进而得到不同风险等级的决策行为组合的风险概率的函数f,基于该风险概率函数可量化交互过程中各阶段可能发生的决策行为的风险水平:
[0137]
f=f(p
潜在冲突
,k)=k*p
潜在冲突
ꢀꢀꢀꢀꢀꢀꢀ
(19)。
[0138]
步骤六:风险关键节点提取。为了有针对性地对人车博弈的冲突风险进行管控,需要对风险演变过程中的关键节点进行识别和提取,所谓风险关键节点,是指在风险演变过
程中可能会产生严重冲突后果的,以及在风险演变过程中能够有效降低潜在危险事故的有效节点,分为以下三大类:
[0139]
(1)交互过程中存在明显行为突变的节点;
[0140]
(2)风险概率高且可调整的时间空间余量较少的节点;
[0141]
(3)风险概率较低但是后续交互过程风险增加的概率较高的节点。
[0142]
采用机器学习与数据挖掘的方法,对风险关键节点进行识别和提取。
[0143]
如图2、3、4所示,第二部分预警系统设计主要是基于第一部分的风险评估结果进行风险关键节点的提取,进而有针对性的进行预警设计。预警系统是基于计算机视觉opencv库中的轨迹提取模型进行数据提取,进而根据风险评估的结果实现交叉口行人过街实时预警功能。具体而言,该部分包括数据采集模块、数据分析处理模块、结果反馈模块。
[0144]
数据采集模块主要是采用高清视频摄像机,用来抓取行人以及来向车辆交互行为数据。
[0145]
数据分析处理模块主要是接收行人行为和机动车运行数据,用于分析机动车运行数据与行人行为,判断两者交互行为是否与关键风险节点样本数据集中相匹配,并对具体的风险类型进行判断,确定采取的针对性预警方式。
[0146]
结果反馈模块主要是采取人行道闪烁灯、语音警告及悬臂式led文字显示的方式来提醒行人以及机动车驾驶员。具体工作流程见图二。对拟定的风险关键节点采取有针对性的预警措施:
[0147]
(1)对于交互过程中存在明显行为突变的节点。采取实时预警的方式,通过语音警告以及人行道闪烁灯提醒行人存在风险。
[0148]
(2)对于风险概率高且可调整的时间空间余量较少的节点。采取语音警告以及人行道闪烁灯提醒行人以及周边行人。
[0149]
(3)对于风险概率较低但是后续交互过程风险增加的概率较高的节点。采取行人-驾驶员双提醒方式,通过语音提醒,人行道闪烁灯,led文字显示来提醒行人及驾驶员存在风险。
[0150]
针对性地预警方式,一方面,有效地警醒需要对风险进行规避人群,提高对风险地规避效率,另一方面,提高了交叉口的通行效率。
[0151]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。