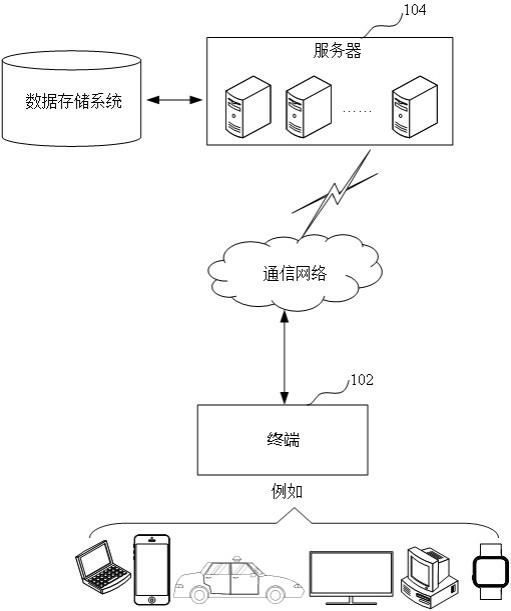
1.本发明属于网联自动驾驶车辆领域,特别是涉及面向新型混合交通流的道路 网络连续设计方法。
背景技术:
2.与人工驾驶车辆相比,联网自动驾驶车辆可以相互降低时空间距以提高链路 容量。这使得网联自动驾驶车辆在缓解交通拥堵方面具有巨大潜力。然而,在混 合交通流运行过程中,人工驾驶的存在显著降低了网联自动驾驶车辆对链路容量 的影响,尤其是在人工驾驶车辆比例较高时。已有研究中采用自动驾驶车辆/收 费车道来控制人工驾驶车辆的流量,即自动驾驶车辆/收费车道允许网联自动驾 驶车辆免费进入,同时也允许人工驾驶车辆通过支付通行费进入。那么如何寻求 最优设计因子以实现网络性能的改善是当前亟需解决的问题。
3.综上,为了增强模拟人工驾驶车辆与网联自动驾驶车辆路线选择行为的真实 性,捕捉人工驾驶车辆与网联自动驾驶车辆需求对自动驾驶车辆/收费车道的收 费变化所引起的服务水平变化弹性,有必要提出具有弹性需求的多类别交通分配 及求解算法,寻求自动驾驶车辆/收费车道上人工驾驶车辆的最优设计因子,从 而在混合交通环境下实现网络性能的最大化。
技术实现要素:
4.本发明的目的是为了寻求自动驾驶车辆/收费车道上人工驾驶车辆的最优收 费率,实现混合交通环境下实现网络性能的最大化,提出了一种面向新型混合交 通流的道路网络连续设计方法。
5.为了解决本发明所提出的技术问题,本发明采用的技术方案如下:
6.一种面向新型混合交通流的道路网络连续设计方法步骤包括:
7.步骤一:对车辆类别、路线集合、链路路径、链路选择、旅行成本、车类流 量、网络平衡以及出行需求进行模型化处理,建立面向新型混合交通流的交通分 配问题模型;
8.步骤二:判断建立面向新型混合交通流的交通分配问题是否具有唯一解,当 面向新型混合交通流的交通分配问题的解是唯一时,面向新型混合交通流的交通 分配问题被表述两级规划问题;
9.当面向新型混合交通流的交通分配问题的解不唯一时,面向新型混合交通流 的交通分配问题被表述为鲁棒性优化问题;
10.步骤三:利用可行方向范数松弛法对面向新型混合交通流的交通分配问题进 行求解,得出最优链路路径。
11.进一步地,建立面向新型混合交通流的交通分配问题模型步骤如下:
12.s1.1计算仅包含人工驾驶车辆且网络运行平衡状态下,车辆在od对w中选 择路线k的概率和预期感知成本,根据预知感知成本求得弹性需求函数;
13.s1.2计算人工驾驶车辆选择路线k时的广义旅行成本通过广义旅行成 本判断出行的需求量;
14.车辆在od对w中选择路线k的概率表示为:
[0015][0016]
其中,是出行者在od对w之间选择链路m的边际概率,是 出行者已经选择了链路m的情况下在od对w之间选择线路k的条件概率;
[0017]
均衡od需求也应该是相应od对之间预期感知旅行成本的函数:
[0018][0019][0020]
弹性需求函数等于平衡状态下的预期感知成本,即为:
[0021][0022]
其中,是od对w之间人工驾驶车辆的平衡需求,是od对w之间线 路k上的人工驾驶车辆的平衡流量,z表示车辆分类,z={h,a}表示所有车辆类 别的集合,其中h表示人工驾驶车辆,a表示网联自动驾驶车辆。wz是所有od 对的集合,是连接od对w的所有路线集合,w∈wz,z∈z,将定义为z类 车辆在od对w之间选择路线k时的旅行成本,定义为od对w之间选择路线k 的z类车辆的流量,v
a,z
定义为链a上车辆类别为z的车流量,定义为od对w之 间需求,w∈wz,qz是z类车辆所有od需求的向量,z∈z,定义为od对w上车 辆类别z的预期感知旅行成本,定义为od对w之间的弹性需求函数, w∈wz,z∈z,δz为z类车辆的连接路径矩阵,λz为z类车辆的od路径矩阵, z∈z,γz表示z类车辆的所有链接集;
[0023]
所述广义旅行成本包括:旅行时间和时间成本;
[0024]
od对w之间人工驾驶车辆选择路线k时的广义旅行成本表示为:
[0025][0026][0027]
其中,od需求可以通过相应od对之间的路线流量求得,θ与u均为公式常 数,其余字母所表示含义与上文表述中的含义相一致;
[0028]ch
(f
*
)和ca(f
*
)分别表示人工驾驶车辆和网联自动驾驶车辆所有路线的修正 旅行成本向量表示如下:
[0029][0030]
以向量的形式表示为:
[0031][0032]
当时,其中va是所有网联自动驾驶车辆链 路流的向量,是平衡状态f
*
下网联自动驾驶车辆的链路流,此时:
[0033][0034]
以上包含三个决策变量,即所有人工驾驶车辆链路流的向量fh,所有网联自 动驾驶车辆路流的向量va,以及所有网联自动驾驶车辆od的需求向量qa,其中
[0035][0036]
为了描述混合交通的路段行程时间,以下函数表示车辆在连接路段上的旅行 时间:
[0037][0038]
是人工驾驶车辆或网联自动驾驶车辆在链路a上的行程时间,是链路a上自由流的行程时间,v
a,h
表示链路a上的人工驾驶车流,v
a,a
表示链路a 上的网联自动驾驶车流,qa是链路a的容量;
[0039]
其中,qa的计算方法为:
[0040][0041]qa,h
是指车辆全部为人工驾驶车辆时链路a的容量,q
a,a
是指车辆全部为网 联自动驾驶车辆时链路a的容量,p
a,a
是指链路a上网联自动驾驶车辆所占的比例, 和均表示混合交通流的平均 车头时距,因为网联自动驾驶车辆的反应时间要小于人工驾驶车辆的反应时间, 所以q
a,a
≥q
a,h
;
[0042]
车辆通过链路时产生费用,利用以下行程时间来计算车辆通过链路的行程成 本:
[0043][0044][0045]
t
a,h
表示人工驾驶车辆在链路a的旅行成本,t
a,a
表示网联自动驾驶车辆在链 路a的旅行成本,τa是链路a上人工驾驶车辆的收费率,ea是单位通行费的等效 行程时间。
[0046]
进一步地,当面向新型混合交通流的交通分配问题的解是唯一时,道路网络 连续设计问题表示为以下两级规划问题:
[0047]
min
τ-f(x
*
(τ),τ)
[0048]
约束条件为:
[0049][0050][0051][0052]
x
*
(τ)是底层具有弹性需求的多类交通分配问题的平衡流解,f(x
*
(τ),τ)表示 三个最优收费设计问题的目标函数,和分别表示 每个链路收费的上限和下限,所有收费率均为非负,且不大于τ
max
。
[0053]
进一步地,当面向新型混合交通流的交通分配问题的解不是唯一时,道路网 络连续设计问题表示为以下两级规划问题:
[0054][0055]
其中,x
*
(τ)和集合是通过解决较低级别的多类交通分配问题得到的, f(x
*
(τ),τ)为道路网络连续设计问题的性能指标。
[0056]
进一步地,利用可行方向范数松弛法对面向新型混合交通流的交通分配问题 进行求解的过程如下:
[0057]
第1步:通过每个链路上设置足够大的收费率,在其范围内找到初始可行点 τ0,设f0为初始自由流,令n=0;
[0058]
第2步:使用修正后的可行方向范数松弛法、收费策略τn及初始流量f0对具 有弹性需求的多类别交通分配问题进行求解,设f
*
(τn)计算所得出的平衡链路流 解,x
*
(τn)为人工驾驶车辆链路流、网联自动驾驶车辆链路流及网联自动驾驶车 辆od需求的对应解;
[0059]
计算梯度和并将计 算结果输入
[0060][0061]
约束条件为:
[0062][0063][0064][0065][0066]
第3步:在平衡状态f
*
(τn),求解二次优化问题,已寻求可行的下降方向dn,如 果则输出τn并停止迭代,否则进入第4步;
[0067]
第4步:近似最佳步长r,具体如下;
[0068]
4.1:设l=0,随机生成一个小的初始步长r
l
,令f
evl
=-f(x
*
(τn),τn),收 费策略为τn r
l
,初始线路流量为f
*
(τn),设f
*
(τn r
l 1
·dn
)是相应的平衡链路 流量解决方案;
[0069]
4.2:如果-f(x
*
(τn r
l
·dn
),τn r
l
·dn
)《f
evl
,令f
evl
=-f(x
*
(τn r
l
· dn),τn r
l
·dn
),r
l 1
=ωr
l
,v
l
=ω,其中ω∈(1,2),v
l
是指容量参数,并且 [0070]
4.3:如果l≥2,v
l
=ω,令τ
n 1
=τn r
l
·dn
,进入第5步,如 果l≥2,v
l 1
=ω,令τ
n 1
=τn r
l 1
*dn,进入第5步,否则进入步 骤4.4;
[0071]
4.4:计算面向新型混合交通流的交通分配问题,以获取均衡流量和目标函 数值,收费策略为τn r
l
·dn
,初始链路的流量为f
*
(τn r
l 1
·dn
);
[0072]
第5步:如果|f(x
*
(τ
n 1
),τ
n 1
)/f(x
*
(τn),τn)|《ε2,然后停止迭代,输出 τ
n 1
;否则,令n=n 1,然后转入第3步,其中ε2是收敛的预定阈值。
[0073]
本发明采用以上技术方案,与现有技术相比,所具有的技术效果如下:
[0074]
本发明提出了面向新型混合交通流类别交通分配问题,设计了最优收费方法, 提出了一种可行方向修正方法,解决了具有弹性需求的多类别交通分配最优收费 设计与求解。能够帮助不同效益追求者寻求自动驾驶车辆/收费车道的最优收费 率,从而在混合交通环境下实现网络性能的最大化。
附图说明
[0075]
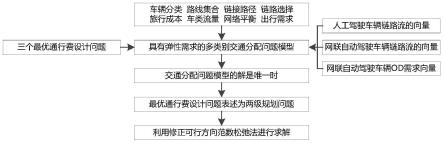
图1为本发明方法流程图。
[0076]
图2为城市道路网络与自动驾驶车辆/收费车道拓扑图。
[0077]
图3为不同最优收费设计问题的目标函数轮廓与求解轨迹图。
具体实施方式
[0078]
下面结合附图和具体实施例对本发明提供的适用于具有弹性需求的多类别 交通分配问题最优收费设计及求解进行详细描述。本实施例只作为本发明技术方 案中一种情况的说明,并不能以本实施例为限制缩小本发明专利的保护范围。
[0079]
如图1所示,一种面向新型混合交通流的道路网络连续设计方法步骤包括:
[0080]
步骤一:对车辆类别、路线集合、链路路径、链路选择、旅行成本、车类流 量、网络平衡以及出行需求进行模型化处理,建立面向新型混合交通流的交通分 配问题模型;
[0081]
步骤二:判断建立面向新型混合交通流的交通分配问题是否具有唯一解,当 面向新型混合交通流的交通分配问题的解是唯一时,面向新型混合交通流的交通 分配问题被表述两级规划问题;
[0082]
当面向新型混合交通流的交通分配问题的解不唯一时,面向新型混合交通流 的交通分配问题被表述为鲁棒性优化问题;
[0083]
步骤三:利用可行方向范数松弛法对面向新型混合交通流的交通分配问题进 行求解,得出最优链路路径。
[0084]
建立面向新型混合交通流的交通分配问题模型步骤如下:
[0085]
s1.1计算仅包含人工驾驶车辆且网络运行平衡状态下,车辆在od对w中选 择路线k的概率和预期感知成本,根据预知感知成本求得弹性需求函数;
[0086]
s1.2计算人工驾驶车辆选择路线k时的广义旅行成本通过广义旅行成 本判断出行的需求量;
[0087]
车辆在od对w中选择路线k的概率表示为:
[0088][0089]
其中,是出行者在od对w之间选择链路m的边际概率,是 出行者已经选择了链路m的情况下在od对w之间选择线路k的条件概率;
[0090]
均衡od需求也应该是相应od对之间预期感知旅行成本的函数:
[0091][0092][0093]
弹性需求函数等于平衡状态下的预期感知成本,即为:
[0094][0095]
其中,是od对w之间人工驾驶车辆的平衡需求,是od对w之间线 路k上的人工驾驶车辆的平衡流量,z表示车辆分类,z={h,a}表示所有车辆类 别的集合,其中h表示人工驾驶车辆,a表示网联自动驾驶车辆。wz是所有od 对的集合,是连接od对w的所有路线集合,w∈wz,z∈z,将定义为z类 车辆在od对w之间选择路线k时的旅行成本,定义为od对w之间选择路线k 的z类车辆的流量,v
a,z
定义为链a上车辆类别为z的车流量,定义为od对w之 间需求,w∈wz,qz是z类车辆所有od需求的向量,z∈z,定义为od对w上车 辆类别z的预期感知旅行成本,定义为od对w之间的弹性需求函数, w∈wz,z∈z,δz为z类车辆的连接路径矩阵,λz为z类车辆的od路径矩阵, z∈z,γz表示z类车辆的所有链接集;
[0096]
所述广义旅行成本包括:旅行时间和时间成本;
[0097]
od对w之间人工驾驶车辆选择路线k时的广义旅行成本表示为:
[0098][0099][0100]
其中,od需求可以通过相应od对之间的路线流量求得,θ与u均为公式常 数,其余字母所表示含义与上文表述中的含义相一致;
[0101]ch
(f
*
)和ca(f
*
)分别表示人工驾驶车辆和网联自动驾驶车辆所有路线的修正 旅行成本向量表示如下:
[0102][0103]
以向量的形式表示为:
[0104][0105]
当时,其中va是所有网联自动驾驶车辆链 路流的向量,是平衡状态f
*
下网联自动驾驶车辆的链路流,此时:
[0106][0107]
以上包含三个决策变量,即所有人工驾驶车辆链路流的向量fh,所有网联自 动驾驶车辆路流的向量va,以及所有网联自动驾驶车辆od的需求向量qa,其中
[0108][0109]
为了描述混合交通的路段行程时间,以下函数表示车辆在连接路段上的旅行 时间:
[0110][0111]
是人工驾驶车辆或网联自动驾驶车辆在链路a上的行程时间,是链路a上自由流的行程时间,v
a,h
表示链路a上的人工驾驶车流,v
a,a
表示链路a 上的网联自动驾驶车流,qa是链路a的容量;
[0112]
其中,qa的计算方法为:
[0113][0114]qa,h
是指车辆全部为人工驾驶车辆时链路a的容量,q
a,a
是指车辆全部为网 联自动驾驶车辆时链路a的容量,p
a,a
是指链路a上网联自动驾驶车辆所占的比例, 和均表示混合交通流的平均 车头时距,因为网联自动驾驶车辆的反应时间要小于人工驾驶车辆的反应时间, 所以q
a,a
≥q
a,h
;
[0115]
车辆通过链路时产生费用,利用以下行程时间来计算车辆通过链路的行程成 本:
[0116][0117][0118]
t
a,h
表示人工驾驶车辆在链路a的旅行成本,t
a,a
表示网联自动驾驶车辆在链 路a的旅行成本,τa是链路a上人工驾驶车辆的收费率,ea是单位通行费的等效 行程时间。
[0119]
进一步地,当面向新型混合交通流的交通分配问题的解是唯一时,道路网络 连续设计问题表示为以下两级规划问题:
[0120]
min
v-f(x
*
(τ),τ)
[0121]
约束条件为:
[0122][0123][0124]
[0125]
x
*
(τ)是底层具有弹性需求的多类交通分配问题的平衡流解,f(x
*
(τ),τ)表示 三个最优收费设计问题的目标函数,和分别表示 每个链路收费的上限和下限,所有收费率均为非负,且不大于τ
max
。
[0126]
当面向新型混合交通流的交通分配问题的解不是唯一时,道路网络连续设计 问题表示为以下两级规划问题:
[0127][0128]
其中,x
*
(τ)和集合是通过解决较低级别的多类交通分配问题得到的, f(x
*
(τ),τ)为道路网络连续设计问题的性能指标。
[0129]
利用可行方向范数松弛法对面向新型混合交通流的交通分配问题进行求解 的过程如下:
[0130]
第1步:通过每个链路上设置足够大的收费率,在其范围内找到初始可行点 τ0,设f0为初始自由流,令n=0;
[0131]
第2步:使用修正后的可行方向范数松弛法、收费策略τn及初始流量f0对具 有弹性需求的多类别交通分配问题进行求解,设f
*
(τn)计算所得出的平衡链路流 解,x
*
(τn)为人工驾驶车辆链路流、网联自动驾驶车辆链路流及网联自动驾驶车 辆od需求的对应解;
[0132]
计算梯度和并将计 算结果输入
[0133][0134]
约束条件为:
[0135][0136][0137][0138][0139]
第3步:在平衡状态f
*
(τn),求解二次优化问题,已寻求可行的下降方向dn,如 果则输出τn并停止迭代,否则进入第4步;
[0140]
第4步:近似最佳步长r,具体如下;
[0141]
4.1:设l=0,随机生成一个小的初始步长r
l
,令f
evl
=-f(x
*
(τn),τn),收 费策略为τn r
l
,初始线路流量为f
*
(τn),设f
*
(τn r
l 1
·dn
)是相应的平衡链路 流量解决方案;
[0142]
4.2:如果-f(x
*
(τn r
l
·dn
),τn r
l
·dn
)《f
evl
,令f
evl
=-f(x
*
(τn r
l
· dn),τn r
l
·dn
),r
l 1
=ωr
l
,v
l
=ω,其中ω∈(1,2),v
l
是指容量参数,并且 [0143]
4.3:如果l≥2,v
l
=ω,令τ
n 1
=τn r
l
·dn
,进入第5步,如 果l≥2,v
l 1
=
ω,令τ
n 1
=τn r
l 1
·dn
,进入第5步,否则进入步 骤4.4;
[0144]
4.4:计算面向新型混合交通流的交通分配问题,以获取均衡流量和目标函 数值,收费策略为τn r
l
·dn
,初始链路的流量为f
*
(τn r
l 1
·dn
);
[0145]
第5步:如果|f(x
*
(τ
n 1
),τ
n 1
)/f(x
*
(τn),τn)|《ε2,然后停止迭代,输出 τ
n 1
;否则,令n=n 1,然后转入第3步,其中ε2是收敛的预定阈值。
[0146]
本发明的有益效果在于:提出了面向新型混合交通流类别交通分配问题,设 计了最优收费方法,提出了一种可行方向修正方法,解决了具有弹性需求的多类 别交通分配最优收费设计与求解。能够帮助不同效益追求者寻求自动驾驶车辆/ 收费车道的最优收费率,从而在混合交通环境下实现网络性能的最大化。
[0147]
为了表明修正后的可行方向范数松弛法的修正性能,假设收费设置为在图2 中链路29和48上向人工驾驶车辆收费,以减少这些链路上的交通拥堵。为了确 定具有弹性需求的多类别交通分配问题的多类别交通分配问题是否有唯一的解决方案,修正后的可行方向范数松弛法 解决方案算法生成了500个不同的初始点和6000个不同的初始点,以网络的平 衡流量。注意,每个初始点的修正后可行方向范数松弛法收敛到相同的平衡流x
*
。 因此,面向新型混合交通流的交通分配问题因此,面向新型混合交通流的交通分配问题可能有唯一的解决方案,min
τ-f(x
*
(τ),τ)将用于寻找 avt链路的最佳收费率,以提高网络性能。需要注意的是,在不设置通行费的 情况下,这些路段在平衡状态下的交通量/通行能力(v/c)超过1.1。
[0148]
对于城市道路网络,针对上述三个最优收费涉及问题f(x
*
(τ),τ)。解决最大 总收入问题、最大顾客问题及最大总需求问题的初始点分别设置为入问题、最大顾客问题及最大总需求问题的初始点分别设置为设h=i2,设σ=1,其中i2是 二维单位矩阵。
[0149]
图3为不同最优收费问题的目标函数轮廓与求解轨迹。结果表明,修正后的 可行方向范数松弛法只需要几次迭代就能找到网络中的所有收费设计问题的最 优解,因此该算法可以非常有效的解决具有弹性需求的多类别交通分配最优收费 设计问题。应该注意的是,一条自动驾驶车辆/收费车道上的人工驾驶车辆与网 联自动驾驶车辆的总流量等于最佳收费状态下的链路容量,这也就阻止了目标函 数的进一步改进。
[0150]
实施例仅为说明本发明的技术思想,不能以此限定本实用新型的保护范围, 凡是按照本实用新型提出的技术思想,在技术方案基础上所做的任何改动,均落 入本实用新型保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。