技术特征:
1.一种信号交叉口人车博弈冲突风险评估方法,其特征在于,包括以下步骤:(1)获取交叉口驾驶员与行人的交互行为的视频数据;(2)根据步骤(1)中的视频数据,获取道路基本参数以及影响驾驶行为与过街行为的相关变量数据;(3)定义驾驶员的决策集s
驾驶员
={让行,不让行},行人的决策集s
行人
={过街,不过街},确定决策行为的风险等级划分标准,以及不同风险等级下的冲突风险指标;(4)根据量子响应均衡博弈理论,从步骤(2)中筛选出影响驾驶人与行人各决策的解释变量,并利用期望效用理论建立驾驶人与行人各决策的期望效用函数;(5)对步骤(4)中的各解释变量进行筛选,作为影响驾驶人与行人各决策的关键变量,筛选的标准为:各个变量之间的pearson相关系数小于0.5,且根据boostrap采样t检验,变量的均值在5%的水平上;将筛选出来的关键变量带入相应的期望效用函数中,获得收益值,进而得出驾驶人与行人决策收益矩阵;(6)根据步骤(5)中得到的驾驶人与行人决策收益矩阵,得到logit-qre形式的行人的过街概率p
过街
、驾驶人让行的概率p
让行
;(7)驾驶行为与过街行为的博弈过程为多次的序列过程,且次序相关性,将每一个先后发生的博弈过程定义为马尔可夫随机过程,人车交互博弈过程时间和状态都离散,人车博弈过程在时刻第n次博弈所处的状态为已知的条件下,第n-1次博弈所处的状态仅与第n次博弈有关,而与第n次博弈之前没有关系,因此,得到第n次博弈的行人的过街概率p
过街
(n),驾驶人让行的概率p
让行
(n);(8)在基准风险等级前提下,第n次博弈过程中,决策行为组合的风险概率的函数为:p
潜在冲突
=p
过街
(n)
×
(1-p
让行
(n));(9)在考虑不同风险等级前提下,确定第n次博弈的决策行为的风险等级以及冲突风险指标,决策行为组合的风险概率的函数为:f=f(p
潜在冲突
,k)=k*p
潜在冲突
,基于该风险概率函数可量化交互过程中各阶段可能发生的决策行为的风险水平。2.根据权利要求1所述的一种信号交叉口人车博弈冲突风险评估方法,其特征在于,步骤(2)中获取道路基本参数以及影响驾驶行为与过街行为的相关变量数据,具体包括:获取交通量、密度、速度、车头时距、饱和度、通行能力和车头间距的参数,以及行人过街前后一定时间内周边过街和等待的行人数,行人流密度、过街速度。3.根据权利要求1所述的一种信号交叉口人车博弈冲突风险评估方法,其特征在于,步骤(3)中是根据pet的阈值将决策行为风险划分为3个风险等级,具体如下:计算冲突双方到达冲突点的时间差值pet:其中,tta
车辆
和tta
行人
是车辆和行人到达冲突区域的时间,d
车辆
和d
行人
是车辆和行人到冲突区域的距离,v
车辆
和v
行人
分别是车辆速度和行人的行走速度;当pet>6s时,此时决策行为风险是可忽略的,k=0;当2.5≤pet≤6s时,此时决策行为风险为中等,k=1;
当pet<2.5s,此时决策行为风险为严重等级,k=2;其中,k为冲突风险指标。4.根据权利要求1所述的一种信号交叉口人车博弈冲突风险评估方法,其特征在于,步骤(4)中利用期望效用理论建立驾驶人与行人各决策的期望效用函数,具体如下:1)行人可以选择行为的期望效用函数表示为:eu
过街
=p
让行
×
au c1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1);eu
不过街
=bv c2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2);2)驾驶员可以选择行为的期望效用函数表示为:eu
让行
=dm c3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3);eu
不让行
=(1-p
过街
)
×
ew c4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4);其中,u和v分别为行人过街与不过街的解释变量,m和w分别为驾驶员让行与不让行的解释变量;c1、c2、c3、c4为常数项;a、b、d、e为系数的向量;0≤p
让行
≤1分别为行人对驾驶员会让路的预期;0≤p
过街
≤1分别为驾驶员对行人会过马路的预期。5.根据权利要求1所述的一种信号交叉口人车博弈冲突风险评估方法,其特征在于,步骤(6)中所述logit-qre形式的驾驶人让行的概率、行人的过街概率,具体如下:驾驶人让行的概率为:行人的过街概率为:6.根据权利要求5所述的一种信号交叉口人车博弈冲突风险评估方法,其特征在于,步骤(6)中p
让行
与p
过街
相互嵌套,计算p
让行
与p
过街
需要进行一个迭代收敛的过程:采用极大似然估计法估计模型参数;δeu
过街
和δeu
让行
是行人决策和驾车员决策的潜在指数,δeu
过街
=eu
过街-eu
不过街
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7),δeu
让行
=eu
让行-eu
不让行
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8);进而构造行人决策的对数似然函数:其中,a人过街效用方程的参数系数,y
i
=1表示行人选择动作{过街},y
i
=0表示行人选择动作{不过街},是logistic分布的累积分布函数;同理,可以构造驾驶员决策的对数似然函数:其中,b为驾驶员让行效用方程的参数系数,y
j
=1表示驾驶员选择操作{让行},y
j
=0表示驾驶员选择操作{不让行};因此,用μ表示所有模型参数的向量,对数似然函数可以表示为:ll(μ;y;x)=ll
行人
(a
w
;y,x) ll
车辆
(a
w
;y,x)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11),
期望最大化可以迭代地应用于logitqre的求解,p
让行
和p
过街
被认为是潜在变量,对于一对初始概率{p
过街,i
,p
让行,i
},通过最大化整个对数似然函数来生成μ
i
,对于μ
i
,根据式(13)和式(14)生成新的概率对{p
过街,i
,p
让行,i
}:}:方程(12)-(14)可以迭代应用,直到{p
过街,i
,p
让行,i
}收敛。7.根据权利要求6所述的一种信号交叉口人车博弈冲突风险评估方法,其特征在于,步骤(7)中第n次人车博弈的交互行为概率{p
过街
(n),p
让行
(n)}可由迭代得到的收敛的{p
过街
(n-1),p
让行
(n-1)}产生,令x为{p
过街
,p
让行
}的状态表征,可得到:p(x
n
=j|x
n-1
=i,x
n-2
=i
n-1
,...,x1=i0)=p(x
n
=j|x
n-1
=i)=p
ij
ꢀꢀꢀꢀꢀꢀ
(15),{p
过街
(n),p
让行
(n)}=p
ij
*{p
过街
(n-1),p
让行
(n-1)}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)。8.一种基于权利要求1所述的风险评估方法的人车博弈冲突风险预警方法,其特征在于,包括以下步骤:(3.1)建立交叉口机动车与行人的交互行为的视频集,根据所述的信号交叉口人车博弈冲突风险评估方法对前述视频集进行评估,采用机器学习与数据挖掘的方法,获得关键风险节点数据样本集;(3.2)利用数据采集模块获取当前信号交叉口的视频数据,并将视频数据传输到数据分析处理模块;(3.3)利用数据分析处理模块对当前信号交叉口的视频数据进行分析处理,判断视频中存在或不存在与关键风险节点数据样本集中相匹配的关键风险节点,若存在相匹配的关键风险节点,对关键风险节点的类型进行判断,并确定采取的预警方式,则将判断结果传送给系统信号反馈单元;(3.4)系统信号反馈单元根据接收到的反馈信息,做出预警。9.根据权利要求8所述的人车博弈冲突风险预警方法,其特征在于,所述的关键风险节点,包括以下三大类:(a)交互过程中存在明显行为突变的节点;(b)风险概率高且可调整的时间空间余量较少的节点;(c)风险概率较低但是后续交互过程风险增加的概率较高的节点。
技术总结
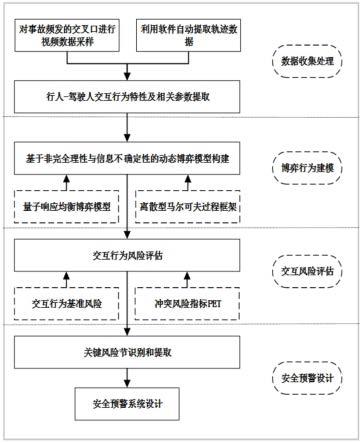
本发明公开了一种信号交叉口人车博弈冲突风险评估与预警方法,属于交通安全与管理领域,根据量子响应均衡博弈理论,并利用期望效用理论建立驾驶人与行人各决策的期望效用函数,构建决策收益矩阵,根据决策收益矩阵行人的过街概率、驾驶人让行的概率;将每一个先后发生的博弈过程定义为马尔可夫随机过程,获得第n次博弈的行人的过街概率、驾驶人让行的概率,在考虑不同风险等级前提下,获得决策行为组合的风险概率,基于决策行为组合的风险概率,实现交叉口行人过街实时预警功能;解决现有技术当中对博弈行为与冲突量化之间同步演变的关系忽视,实时识别出关键风险节,并给出预警,提高风险的评估的准确度。提高风险的评估的准确度。提高风险的评估的准确度。
技术研发人员:朱殿臣 张秀伟 冯忠祥 李靖宇
受保护的技术使用者:合肥工业大学
技术研发日:2022.09.30
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。