1.本发明涉及检测船舶信号技术领域,尤其涉及一种船舶定位信号的检测方法及装置。
背景技术:
2.船舶自动识别系统(automatic identification system,ais)是一种网络、通讯、计算和显示等技术的数字助航系统和设备。既可以通过连接船上的gps定位仪、测深仪、电罗经等采集各种船舶航行动态信息,并显示在电子屏上为操纵人员提供船舶的实时航行信息;也可以将船舶的静态和动态信息发送到附近的岸上基站或者卫星上,使周围船舶和监控中心均能收到信息,供监控中心对船舶规范经营行为进行监督和指挥,以避免船舶相互间发生碰撞。
3.然而一些船舶为了逃避监管,可能会故意关闭ais设备或篡改ais设备信息,导致监控中心无法对其航行路径进行识别,增加了各个船舶航行的风险。为了避免上述情况,监控中心会对船舶的定位信号进行实时检测,目前常用的检测方法是:采集船舶两个相邻时间节点的定位信号,基于两个定位信号的位置计算船舶在两个时间节点内行驶的轨迹,若计算的行驶轨迹与船舶的动态轨迹不同,则确定定位信号有异常。
4.但目前常用的检测方法有如下技术问题:船舶在不同的海域航行时,可能受到各种不同环境因素的影响导致信号丢失(例如,航行网格无固定基站服务或卫星覆盖时效性低等情况),仅采集了船舶两个不同海域的定位信号。而不同海域其定位信号的时效性不同(如近岸区域信号丢失10分钟为异常,而在远海信号丢失3小时是正常),若采用两个不同时效性的定位信号进行信号检测,检测的误差较大,准确率较低。
技术实现要素:
5.本发明提出一种船舶定位信号的检测方法及装置,所述方法在实时获取船舶的定位信号后,分别计算定位信号的实际延迟时长以及定位信号所在的海域区域对应的可延迟阈值时长,根据实际延迟时长与可延迟阈值时长的比较结果确定定位信号是否异常,以减少检测的误差,提高检测的准确率。
6.本发明实施例的第一方面提供了一种船舶定位信号的检测方法,所述方法包括:
7.按照预设的采集时间间隔,在检测的海域网络内获取定位数据集,所述定位数据集包括一个或多个定位信号,所述定位信号包括:ais信号、北斗信号,所述海域网络是对待检测海域进行网格化规划后得到;
8.计算所述定位信号在当前海域网络对应的信号延迟时长,以及计算所述待检测船舶在当前海域网络对应的延迟阈值时长;
9.若所述信号延迟时长小于所述延迟阈值时长或多个所述信号延迟时长均小于所述延迟阈值时长时,则确定所述定位信号为正常信号;
10.若所述信号延迟时长大于所述延迟阈值时长或多个所述信号延迟时长均大于所
述延迟阈值时长时,则确定所述定位信号为异常信号。
11.在第一方面的一种可能的实现方式中,所述计算所述待检测船舶在当前海域网络对应的延迟阈值时长,包括:
12.确定所述定位信号在海域网络内的网格位置,并提取所述网格位置对应的网格编号;
13.基于所述网格编号查找对应的延迟函数;
14.按照所述延迟函数计算延迟阈值时长。
15.在第一方面的一种可能的实现方式中,在所述确定所述定位信号为异常信号的步骤后,所述方法还包括:
16.计算所述信号延迟时长与所述延迟阈值时长的差值,得到时长差值;
17.当所述时长差值大于预设的比较阈值时,调整所述延迟函数的函数权重与函数常量。
18.在第一方面的一种可能的实现方式中,所述计算所述定位信号在当前海域网络对应的信号延迟时长,包括:
19.计算所述定位信号在当前海域网络的获取时间节点与当前时间节点的差值,得到信号延迟时长;
20.或者;
21.以所述定位信号的获取时间节点为起点,按照所述预设的采集时间间隔在当前海域网络内接收多个定位信号并计算多个定位信号的平均延时,得到信号延迟时长。
22.在第一方面的一种可能的实现方式中,所述在检测的海域网络内获取待检测船舶的定位信号,包括:
23.在确定检测的海域网络后,对所述海域网络分别进行网格化聚类和分级,得到划分了多级网格的海域网格,其中,每个网格对应一个网格编号;
24.获取所述海域网格内每个网格的网格参数集,并从所述网格参数集中提取一个或多个定位信号。
25.在第一方面的一种可能的实现方式中,所述分级的方法,包括:基于离海岸线距离进行划分、基于行政管辖范围进行划分、基于聚类分析结果划分、按照相关经验划分和或ais基站服务范围划分;
26.所述网格化聚类的方法,包括:基于密度的船舶ais轨迹聚类、基于统计学的船舶ais轨迹聚类方法或基于距离的船舶ais轨迹聚类方法。
27.在第一方面的一种可能的实现方式中,在所述确定所述定位信号为异常信号的步骤后,所述方法还包括:
28.获取每个网格的异常信号,得到多个异常信号;
29.将所述多个异常信号编辑成对应的异常列表,并在所述异常列表中标记所述异常信号对应的船舶,以供专业人员研判。
30.本发明实施例的第二方面提供了一种船舶定位信号的检测装置,所述装置包括:
31.获取模块,用于按照预设的采集时间间隔,在检测的海域网络内获取定位数据集,所述定位数据集包括一个或多个定位信号,所述定位信号包括:ais信号、北斗信号,所述海域网络是对待检测海域进行网格化规划后得到;
32.计算模块,用于计算所述定位信号在当前海域网络对应的信号延迟时长,以及计算所述待检测船舶在当前海域网络对应的延迟阈值时长;
33.检测正常模块,用于若所述信号延迟时长小于所述延迟阈值时长或多个所述信号延迟时长均小于所述延迟阈值时长时,则确定所述定位信号为正常信号;
34.检测异常模块,用于若所述信号延迟时长大于所述延迟阈值时长或多个所述信号延迟时长均大于所述延迟阈值时长时,则确定所述定位信号为异常信号。
35.相比于现有技术,本发明实施例提供的一种船舶定位信号的检测方法及装置,其有益效果在于:本发明可以实时获取检测海域网络内各个船舶的定位信号,并分别计算定位信号的实际延迟时长以及定位信号所在的海域区域对应的可延迟阈值时长,根据实际延迟时长与可延迟阈值时长的比较结果,确定定位信号是否异常,从而减少检测的误差,提高检测的准确率。
附图说明
36.图1是本发明一实施例提供的一种船舶定位信号的检测方法的流程示意图;
37.图2是本发明一实施例提供的一种船舶定位信号的检测装置的结构示意图。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.船舶自动识别系统(automatic identification system,ais)是一种网络、通讯、计算和显示等技术的数字助航系统和设备。既可以通过连接船上的gps定位仪、测深仪、电罗经等采集各种船舶航行动态信息,并显示在电子屏上为操纵人员提供船舶的实时航行信息;也可以将船舶的静态和动态信息发送到附近的岸上基站或者卫星上,使周围船舶和监控中心均能收到信息,供监控中心对船舶规范经营行为进行监督和指挥,以避免船舶相互间发生碰撞。
40.然而一些船舶为了逃避监管,可能会故意关闭ais设备或篡改ais设备信息,导致监控中心无法对其航行路径进行识别,增加了各个船舶航行的风险。为了避免上述情况,监控中心会对船舶的定位信号进行实时检测,目前常用的检测方法是:采集船舶两个相邻时间节点的定位信号,基于两个定位信号的位置计算船舶在两个时间节点内行驶的轨迹,若计算的行驶轨迹与船舶的动态轨迹不同,则确定定位信号有异常。
41.但目前常用的检测方法有如下技术问题:船舶在不同的海域航行时,可能受到各种不同环境因素的影响导致信号丢失(例如,航行网格无固定基站服务或卫星覆盖时效性低等情况),仅采集了船舶两个不同海域的定位信号。而不同海域其定位信号的时效性不同(如近岸区域信号丢失超过10分钟为异常,而在远海信号丢失超过3小时是正常)。若采用两个不同时效性的定位信号进行信号检测,检测的误差较大,准确率较低。
42.例如,在a区域内信号丢失超过10分钟为异常,b区域内信号丢失超过1小时为异常。船舶在a区域时,采集的信号仅包括第15分钟的信号,此信号在a区域为异常信号。待15
分钟后,船舶行驶至b区域,再采集得到信号,此信号在b区域为正常信号,采用一个异常信号与一个正常信号进行检测,其信号的检测标准不同,误差较大,准确率较低。
43.为了解决上述问题,下面将通过以下具体的实施例对本技术实施例提供的一种船舶定位信号的检测方法进行详细介绍和说明。
44.在一实施例中,所述方法适用于船舶监控中心的后台管理系统,该系统可以对船舶信号进行采集、监控和管理,以确定船舶的形式路线以及安全规划等。
45.参照图1,示出了本发明一实施例提供的一种船舶定位信号的检测方法的流程示意图。
46.其中,作为示例的,所述船舶定位信号的检测方法,可以包括:
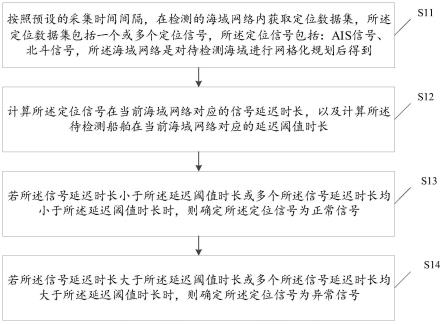
47.s11、按照预设的采集时间间隔,在检测的海域网络内获取定位数据集,所述定位数据集包括一个或多个定位信号,所述定位信号包括:ais信号、北斗信号,所述海域网络是对待检测海域进行网格化规划后得到。
48.海域网络是船舶监控中心所管理的监控海域范围的网络,且该网络是进行了网格化话规划,通过网格化规划,可以将整个海域划分成不同的网格,而不同的网格可以有不同的延迟阈值,从而能根据其延迟阈值与其定位信号的延迟进行比较,以准确检测信号是否出错。系统可以在其监控的网络中采集每个船舶的定位信号,所述定位信号具体可以包括但不限于ais信号或者北斗信号或其他各类不同的定位信号。
49.在一可选的实际方式中,系统可以每隔15分钟或1小时对监控的海域网络进行一次检测,以采集得到一个或多个定位信号。需要说明的是,预设的采集时间间隔可以根据实际需要进行调整。
50.在实际操作中,可以在一个预设的时间间隔中,采集一个定位信号进行检测处理;可以在一个预设的时间间隔中,采集多个信号进行检测处理;也可以在连续在多个预设的时间间隔中,每个间隔采集一个信号进行检测处理;也可以在连多个预设的时间间隔中,每个间隔采集多个信号进行检测处理。具体可以根据海域要求或实际应用需求进行调整。
51.由于监控中心所管理的海域范围可能包括近海和远海,为了区分不同海域,其中,作为示例的,步骤s11可以包括以下子步骤:
52.s111、在确定检测的海域网络后,对所述海域网络分别进行网格化聚类和分级,得到划分了多级网格的海域网格,其中,每个网格对应一个网格编号。
53.s112、获取所述海域网格内每个网格的网格参数集,并从所述网格参数集中提取一个或多个定位信号。
54.在实际操作中,通过对监控的海域网络进行网格化聚类和分级,可以将海域划分成若干个不同的小海域范围,每个小海域范围均可以对应一种延迟时间。可以按照该区域的延迟时间对该区域所采集的信号进行异常检测,从而能避免因信号检测标准不同而导致检测出错的情况,有效提高检测的准确率。
55.在网格化聚类和分级后,为了区分每个划分了的网格,可以给每个网络设定一个网格编号。
56.在一实施例中,可以将系统管理的海域划分成多个网格,每个网格对应一个编号(如,800、801、802等)。图2中的每一个点为一个海域网格。
57.接着,可以获取每个网格的网格参数集,参数集可以包含网格中一个或多个船舶
的不同航行参数,例如,ais定位信号;ri:网格参数;tt:时间参数;dimed:网格内ais信号延迟中位数;dimean:网格内ais信号延迟平均值;dimin:网格内ais信号延迟最小值;dimax,网格内ais信号延迟最大值等等。
58.接着,再从参数集中提取对应的ais定位信号。
59.在一实施例中,所述分级的方法,包括但不限于:基于离海岸线距离进行划分、基于行政管辖范围进行划分、基于聚类分析结果划分、按照相关经验划分和或ais基站服务范围划分。
60.在一实施例中,所述网格化聚类的方法,包括但不限于:基于密度的船舶ais轨迹聚类、基于统计学的船舶ais轨迹聚类方法或基于距离的船舶ais轨迹聚类方法。
61.需要说明的是,每个网格参数集所包含的一个或多个定位信号可以是一个船舶的一个或多个定位信号,也可以是多个船舶所对应的多个定位信号。
62.具体地,海域网络的网格内,可能有多台船舶行驶,每台船舶均可能在预设的采集时间间隔内发生定位信号,使得采集的网格参数集可以包括一个船舶的一个或多个定位信号,也可以是多个船舶所对应的多个定位信号。
63.s12、计算所述定位信号在当前海域网络对应的信号延迟时长,以及计算所述待检测船舶在当前海域网络对应的延迟阈值时长。
64.在获取对应的定位信号后,可以计算获取该定位信号在当前海域网络所对应的网格的延迟,得到信号延迟时长。同时也可以计算定位信号所在的当前海域网络的可接受的延迟时长,得到延迟阈值时长。
65.例如,a海域网络的某一网格区域内,超过5分钟的信号为异常,小于或等于5分钟的信号为正常,则5分钟为其延迟阈值时长。
66.为了提高计算信号延迟时长的准确率,在一可选的实施例中,步骤s12可以包括以下子步骤:
67.s121、计算所述定位信号在当前海域网络的获取时间节点与当前时间节点的差值,得到信号延迟时长。
68.具体地,可以确定获取定位信号在当前海域网络的时间节点得到获取时间节点,以及确定当前时间节点,计算获取时间节点和当前时间节点的差值,得到信号延迟时长。
69.s122、以所述定位信号的获取时间节点为起点,按照所述预设的采集时间间隔在当前海域网络内接收多个定位信号并计算多个定位信号的平均延时,得到信号延迟时长。
70.在一实施例中,可以通过平均算法计算。具体地,可以以取得定位信号的时间节点为起始时间节点,然后统计在预设的采集时间间隔内所获取的多个定位信号,并分别计算每个定位信号的信号延迟时长,然后对多个信号延迟时长求平均值,得到最后的信号延迟时长。
71.例如,以取得定位信号的时间节点为起始时间节点,统计在一个小时的船舶的定位信号(ais信号),计算该周期内每个ais信号的间隔延迟时长,最后求平均。
72.为了准确计算延迟阈值时长,在一可选的实施例中,步骤s12可以包括以下子步骤:
73.s123、确定所述定位信号在海域网络内的网格位置,并提取所述网格位置对应的网格编号。
74.s124、基于所述网格编号查找对应的延迟函数。
75.s125、按照所述延迟函数计算延迟阈值时长。
76.具体地,可以确定定位信号在海域网络内的海域网格,得到网格位置;然后提取该网格位置对应的在先设定的网格编号,例如,801。根据这个编号可以查找这个海域网格所对应的延迟函数,最后利用延迟函数计算其对应的延迟阈值时长。
77.可选地,延迟函数的计算公式可以如下式所示:
78.thx=con we*d
imed
。
79.上式中,thx为延迟阈值时长,con为计算常量,we为权重;dimed为延迟中位数,具体可以从网格参数集中提取。
80.s13、若所述信号延迟时长小于所述延迟阈值时长或多个所述信号延迟时长均小于所述延迟阈值时长时,则确定所述定位信号为正常信号。
81.可以比较信号延迟时长与延迟阈值时长的大小,若信号延迟时长小于延迟阈值时长,则说明该信号在对应的海域网格中属于正常,确定该信号为正常信号。
82.具体地,若获取一个定位信号,且该定位信号的信号延迟时长小于延迟阈值时长,在确定定位信号为正常信号。若获取多个定位信号,且多个定位信号的信号延迟时长均小于延迟阈值时长,则确定多个定位信号为正常信号。若获取多个定位信号,且信号延迟时长小于延迟阈值时长的信号数量小于预设数量值,则确定多个定位信号为正常信号;反之,则确定多个定位信号为异常信号。
83.s14、若所述信号延迟时长大于所述延迟阈值时长或多个所述信号延迟时长均大于所述延迟阈值时长时,则确定所述定位信号为异常信号。
84.若信号延迟时长大于延迟阈值时长,则说明该信号在对应的海域网格中属于异常,确定该信号为异常信号。
85.具体地,若获取一个定位信号,且该定位信号的信号延迟时长大于延迟阈值时长,在确定定位信号为异常信号。若获取多个定位信号,且多个定位信号的信号延迟时长均大于延迟阈值时长,则确定多个定位信号为异常信号。若获取多个定位信号,且信号延迟时长大于延迟阈值时长的信号数量大于预设数量值,则确定多个定位信号为异常信号,反之,则确定为正常信号。
86.由于计算延迟阈值时长是通过延迟函数,而延迟函数是用户设定的,为了使延迟函数更加贴近其对应海域网格的实际情况,其中,作为示例的,在步骤s14后,所述方法还可以包括:
87.s21、计算所述信号延迟时长与所述延迟阈值时长的差值,得到时长差值。
88.s22、当所述时长差值大于预设的比较阈值时,调整所述延迟函数的函数权重与函数常量。
89.具体地,若时长差值大于预设的比较阈值时,说明信号延迟时长与延迟阈值时长之间的偏差较大,可能是延迟函数与该海域网格的通信环境偏差较大,计算的延迟阈值时长也与实际的误差较大。
90.为了修正上述误差,可以调整延迟函数的函数权重与函数常量。
91.承接上述例子,若延迟函数的计算公式为:thx=con we*d
imed
。
92.对应地,可以调整计算常量con和权重we。
93.在一实施例中,所见到的海域网络中可能有多个异常的信号,为了方便用户查看多个异常信号,其中,作为示例的,在步骤s14后,所述方法还可以包括:
94.s31、获取每个网格的异常信号,得到多个异常信号。
95.s32、将所述多个异常信号编辑成对应的异常列表,并在所述异常列表中标记所述异常信号对应的船舶,以供专业人员研判。
96.在实际操作中,可以获取一段时长内的多个异常信号(例如,3小时或半天或一天),将多个异常信号整合成一个列表,并在列表中标记一次信号所对应的船舶,最后再展示在系统的显示屏或者发送至管理人员的智能终端,供技术人员或管理人员查看,或者对标记的船舶进行重点检测。
97.在本实施例中,本发明实施例提供了一种船舶定位信号的检测方法,其有益效果在于:本发明可以实时获取检测海域网络内各个船舶的定位信号,并分别计算定位信号的实际延迟时长以及定位信号所在的海域区域对应的可延迟阈值时长,根据实际延迟时长与可延迟阈值时长的比较结果,确定定位信号是否异常,从而减少检测的误差,提高检测的准确率。
98.本发明实施例还提供了一种船舶定位信号的检测装置,参见图2,示出了本发明一实施例提供的一种船舶定位信号的检测装置的结构示意图。
99.其中,作为示例的,所述船舶定位信号的检测装置可以包括:
100.获取模块,用于按照预设的采集时间间隔,在检测的海域网络内获取定位数据集,所述定位数据集包括一个或多个定位信号,所述定位信号包括:ais信号、北斗信号,所述海域网络是对待检测海域进行网格化规划后得到;
101.计算模块,用于计算所述定位信号在当前海域网络对应的信号延迟时长,以及计算所述待检测船舶在当前海域网络对应的延迟阈值时长;
102.检测正常模块,用于若所述信号延迟时长小于所述延迟阈值时长或多个所述信号延迟时长均小于所述延迟阈值时长时,则确定所述定位信号为正常信号;
103.检测异常模块,用于若所述信号延迟时长大于所述延迟阈值时长或多个所述信号延迟时长均大于所述延迟阈值时长时,则确定所述定位信号为异常信号。
104.可选地,所述计算模块,还用于:
105.确定所述定位信号在海域网络内的网格位置,并提取所述网格位置对应的网格编号;
106.基于所述网格编号查找对应的延迟函数;
107.按照所述延迟函数计算延迟阈值时长。
108.可选地,在所述确定所述定位信号为异常信号的步骤后,所述装置还包括:
109.时长差值模块,用于计算所述信号延迟时长与所述延迟阈值时长的差值,得到时长差值;
110.调整模块,用于当所述时长差值大于预设的比较阈值时,调整所述延迟函数的函数权重与函数常量。
111.可选地,所述计算模块,还用于:
112.计算所述定位信号在当前海域网络的获取时间节点与当前时间节点的差值,得到信号延迟时长;
113.或者;
114.以所述定位信号的获取时间节点为起点,按照所述预设的采集时间间隔在当前海域网络内接收多个定位信号并计算多个定位信号的平均延时,得到信号延迟时长。
115.可选地,所述获取模块,还用于:
116.在确定检测的海域网络后,对所述海域网络分别进行网格化聚类和分级,得到划分了多级网格的海域网格,其中,每个网格对应一个网格编号;
117.获取所述海域网格内每个网格的网格参数集,并从所述网格参数集中提取一个或多个定位信号。
118.可选地,所述分级的方法,包括:基于离海岸线距离进行划分、基于行政管辖范围进行划分、基于聚类分析结果划分、按照相关经验划分和或ais基站服务范围划分;
119.所述网格化聚类的方法,包括:基于密度的船舶ais轨迹聚类、基于统计学的船舶ais轨迹聚类方法或基于距离的船舶ais轨迹聚类方法。
120.可选地,所述装置还包括:
121.异常信号模块,用于获取每个网格的异常信号,得到多个异常信号;
122.列表模块,用于将所述多个异常信号编辑成对应的异常列表,并在所述异常列表中标记所述异常信号对应的船舶,以供专业人员研判。
123.所属技术领域的技术人员可以清楚地了解到,为方便的描述和简洁,上述描述的装置的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
124.进一步的,本技术实施例还提供了一种电子设备,包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述实施例所述的船舶定位信号的检测方法。
125.进一步的,本技术实施例还提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机可执行程序,所述计算机可执行程序用于使计算机执行如上述实施例所述的船舶定位信号的检测方法。
126.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。