1.本发明涉及海洋探测技术领域,特别是涉及一种纬度线上的单独动力式海洋探测方法。
背景技术:
2.现有技术海洋磁力探测多采用测量船拖曳探测装置进行探测,拖曳探测装置的拖缆长度一般通过现有的经验来设定,一般拖缆长度为船长的三倍以上,凭经验设置拖缆长度的探测方法在深海中可以很好的应用,但在浅水岛礁区时不太适用,极易发生拖缆被割断或探测装置触底的探测事故,主要原因在于浅水岛礁区的水下环境复杂,而现有技术的拖缆长度设置不合理,导致水下探测的时候拖缆容易被各种半悬浮异物或水底的礁石割断,导致探测装置脱离飘走,同时探测装置容易触底,造成设备的损坏。
3.另外,在收到地质运动而多变的岛礁区域,越是大型的船只越是无法进入,仅仅只有小型的船只才可以进入探测。
4.还有,在某处海域收到信号屏蔽,或者海战特殊环境下,小型船只为了有效躲避敌方声学探测、安全履行使命任务的能力,仅仅只能都尽可能缩减体积以及删除功能,且探测过程不能向外发送电磁信号,所以小型探测器的探测难度十分之高。亟需一种能够有效隐藏自身的前提下获取海上障碍物分布的方法。
技术实现要素:
5.本发明的目的是提供一种纬度线上的单独动力式海洋探测方法,利用纬度探测的便利性,对探测器功能做减法,有效降低其体积和外溢电磁信号的风险,降低被对方探测发现的同时,可以对指定海域进行障碍物分布获取。
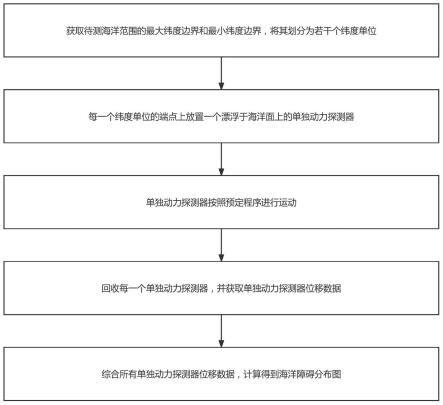
6.根据本发明的第一方面,提出一种纬度线上的单独动力式海洋探测方法,包括:
7.获取待测海洋范围的最大纬度边界和最小纬度边界,将其划分为若干个纬度单位;
8.每一个纬度单位的端点上放置一个漂浮于海洋面上的单独动力探测器,单独动力探测器设置有时钟和位移感应器;
9.单独动力探测器按照预定程序进行运动;
10.回收每一个单独动力探测器,并获取单独动力探测器位移数据;
11.综合所有单独动力探测器位移数据,计算得到海洋障碍分布图。
12.预定程序如下:
13.探测器获取该纬度单位的初始纬度值,从纬度单位的端点向纬度单位的另一端运动;
14.运动过程中根据时钟与太阳位置获取自身所在纬度,调整自身位置并确保探测器位于初始纬度上;
15.在前方遇阻时绕开障碍物,绕开障碍物之后回到初始纬度上。
16.进一步的,在获取待测海洋范围的最大纬度边界和最小纬度边界之后,还根据待测海洋范围预测障碍物分布密度,设定划分值,将其划分为划分值个纬度单位。
17.进一步的,在前方遇阻时绕开障碍物时,具体包括:
18.向最大纬度边界和最小纬度边界中靠近的一个纬度边界绕开障碍物。
19.进一步的,在前方遇阻时绕开障碍物时,具体包括:
20.单独动力探测器与障碍物之间距离不低于预定安全距离值。
21.进一步的,在前方遇阻时绕开障碍物时,还包括:
22.绕开障碍物时进行位移量获取,获取绕开障碍物的位移数据,直至回到初始纬度上停止计时。
23.进一步的,计算得到海洋障碍分布图时,具体包括:
24.综合所有单独动力探测器位移数据、绕开障碍物计时结果以及绕开障碍物的位移数据,计算得到海洋障碍分布图。
25.根据本发明的第二方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一方面中任一项的所述方法步骤。
26.根据本发明的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面中任一项的所述方法步骤。
27.本发明的有益效果为:
28.本发明提供了一种纬度线上的单独动力式海洋探测方法,利用纬度探测的便利性,对探测器功能做减法,有效降低其体积和外溢电磁信号的风险,降低被对方探测发现的同时,可以对指定海域进行障碍物分布获取。
附图说明
29.并入到说明书中并且构成说明书的一部分的附图示出了本发明的实施例,并且与描述一起用于解释本发明的原理。在这些附图中,类似的附图标记用于表示类似的要素。下面描述中的附图是本发明的一些实施例,而不是全部实施例。对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。
30.图1为本发明实施例的一种纬度线上的单独动力式海洋探测方法的流程图。
具体实施方式
31.为了更清楚的说明本发明实施例和现有技术中的技术方案,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创在性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。另,设计方位的属于仅表示各部件间的相对位置关系,而不是绝对位置关系。
32.实施例一
33.根据本发明的第一方面,提供了一种纬度线上的单独动力式海洋探测方法,如图1所示,为纬度线上的单独动力式海洋探测方法的流程图,包括:
34.s100、获取待测海洋范围的最大纬度边界和最小纬度边界,将其划分为若干个纬
memory,ram)、磁盘或光盘等。
67.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包含一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
…”
限定的要素,并不排除在包括要素的过程、方法、物品或者设备中还存在另外的相同要素。
68.以上内容是结合具体的优选实施方式对本发明所做的进一步详细说明,不能认定本发明的具体实施例只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
技术特征:
1.一种纬度线上的单独动力式海洋探测方法,其特征在于,包括:获取待测海洋范围的最大纬度边界和最小纬度边界,将其划分为若干个纬度单位;每一个纬度单位的端点上放置一个漂浮于海洋面上的单独动力探测器,单独动力探测器设置有时钟和位移感应器;单独动力探测器按照预定程序进行运动;回收每一个单独动力探测器,并获取单独动力探测器位移数据;综合所有单独动力探测器位移数据,计算得到海洋障碍分布图。预定程序如下:探测器获取该纬度单位的初始纬度值,从纬度单位的端点向纬度单位的另一端运动;运动过程中根据时钟与太阳位置获取自身所在纬度,调整自身位置并确保探测器位于初始纬度上;在前方遇阻时绕开障碍物,绕开障碍物之后回到初始纬度上。2.根据权利要求1所述的一种纬度线上的单独动力式海洋探测方法,其特征在于,在获取待测海洋范围的最大纬度边界和最小纬度边界之后,还根据待测海洋范围预测障碍物分布密度,设定划分值,将其划分为划分值个纬度单位。3.根据权利要求1所述的一种纬度线上的单独动力式海洋探测方法,其特征在于,在前方遇阻时绕开障碍物时,具体包括:向最大纬度边界和最小纬度边界中靠近的一个纬度边界绕开障碍物。4.根据权利要求1所述的一种纬度线上的单独动力式海洋探测方法,其特征在于,在前方遇阻时绕开障碍物时,具体包括:单独动力探测器与障碍物之间距离不低于预定安全距离值。5.根据权利要求1所述的一种纬度线上的单独动力式海洋探测方法,其特征在于,在前方遇阻时绕开障碍物时,还包括:绕开障碍物时进行位移量获取,获取绕开障碍物的位移数据,直至回到初始纬度上停止计时。6.根据权利要求5所述的一种纬度线上的单独动力式海洋探测方法,其特征在于,计算得到海洋障碍分布图时,具体包括:综合所有单独动力探测器位移数据、绕开障碍物计时结果以及绕开障碍物的位移数据,计算得到海洋障碍分布图。7.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至6任一项所述一种纬度线上的单独动力式海洋探测方法。8.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述一种纬度线上的单独动力式海洋探测方法。
技术总结
本发明公开了一种纬度线上的单独动力式海洋探测方法,涉及海洋探测技术领域,方法包括获取待测海洋范围的最大纬度边界和最小纬度边界,将其划分为若干个纬度单位;每一个纬度单位的端点上放置一个漂浮于海洋面上的单独动力探测器,单独动力探测器设置有时钟和位移感应器;单独动力探测器按照预定程序进行运动;回收每一个单独动力探测器,并获取单独动力探测器位移数据;综合所有单独动力探测器位移数据,计算得到海洋障碍分布图。本发明利用纬度探测的便利性,对探测器功能做减法,有效降低其体积和外溢电磁信号的风险,降低被对方探测发现的同时,可以对指定海域进行障碍物分布获取。布获取。布获取。
技术研发人员:安庆 罗敏 苏厚胜 李雅琼
受保护的技术使用者:湖北汽车工业学院
技术研发日:2022.10.21
技术公布日:2023/1/31
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
