1.本技术涉及航天器姿态控制技术领域,特别是涉及一种全电卫星的开关式有限时间全局收敛姿态控制方法、装置、计算机设备和存储介质。
背景技术:
2.过去数十年中,人们对小卫星技术的兴趣日益浓厚。组件小型化的最新发展能使小卫星执行更为复杂的任务。由于尺寸、体积和功率有限,小卫星需要在子系统间权衡设计。传统上,姿态控制由轮控系统完成而轨道控制则由推进器完成。轮控系统输出力矩大而且可连续变化,控制精度也很高。但由于饱和问题的存在,缺点也显而易见,因为饱和问题总是需要其他类型的控制器(磁棒或者推力器)卸载累积的角动量。此外输出扭矩大小与轮控系统本身的质量密切相关,较大的输出通常意味着较大的质量。几十年来,已发展出多种电推进系统,其中脉冲等离子推力器(ppt)由于其高可靠性和易操作性,通常用于小型卫星,可以输出μn到mn范围的推力。直到最近,电推进系统与姿态控制系统完全融合才见诸报道:仅配备微阴极电弧推进器的3u立方体卫星可实现三轴精确姿态控制,相对立方体卫星的反作用飞轮,系统质量降为72%,非常有利于增加有效载荷子系统的占比。同时,除去飞轮系统和相应的磁棒系统,也大大减少提高了可靠性。
3.目前,全电小卫星采用的控制算法是经典相平面控制器,其输出是一系列开关信号,正好匹配电推力器的开关操作。然而,相平面方法具有天然的局部稳定性,即在某些情况下,如大角度姿态跟踪,控制可能发散,全电卫星在仅有开关功能、而非连续变化的推力的条件下,姿态跟踪误差发散。
技术实现要素:
4.基于此,有必要针对上述技术问题,提供一种能够实现指定姿态角指令机动时使姿态跟踪误差全局收敛的一种全电卫星的开关式有限时间全局收敛姿态控制方法、装置、计算机设备和存储介质。
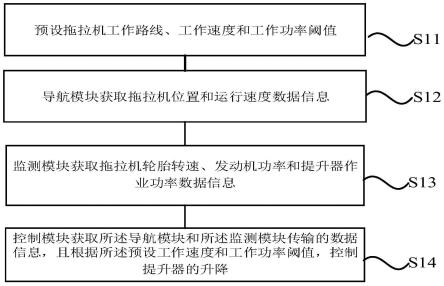
5.一种全电卫星的开关式有限时间全局收敛姿态控制方法,所述方法包括:
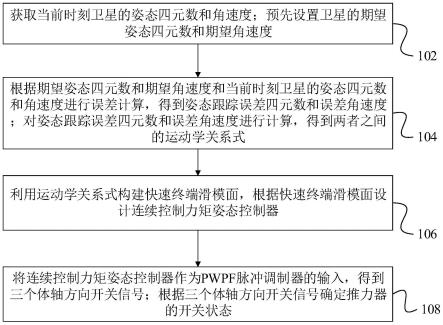
6.获取当前时刻卫星的姿态四元数和角速度;预先设置卫星的期望姿态四元数和期望角速度;
7.根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度;
8.对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式;
9.利用运动学关系式构建快速终端滑模面,根据快速终端滑模面设计连续控制力矩姿态控制器;
10.将连续控制力矩姿态控制器作为pwpf脉冲调制器的输入,得到三个体轴方向开关信号;根据三个体轴方向开关信号确定推力器的开关状态。
11.在其中一个实施例中,根据期望姿态四元数和期望角速度和当前时刻卫星的姿态
四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度,包括:
12.根据期望姿态四元数和当前时刻卫星的姿态四元数进行误差计算,得到姿态跟踪误差四元数为
[0013][0014]
其中,表示当前时刻卫星的姿态四元数,表示期望姿态四元数,t表示转置运算,q
e0
表示的标部,表示的矢部;
[0015]
根据期望角速度和当前时刻卫星的角速度进行误差计算,得到误差角速度为we=ω-wd,其中wd表示期望角速度,w表示当前时刻卫星的角速度。
[0016]
在其中一个实施例中,对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式,包括:
[0017]
对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式为
[0018][0019]
其中,其中,表示q
e0
的时间导数,表示qe的时间导数。
[0020]
在其中一个实施例中,利用运动学关系式构建快速终端滑模面,包括:
[0021]
利用运动学关系式构建快速终端滑模面为
[0022]
其中,δ=diag[δ1,δ2,δ3],δi>1,tf为时间参数,t表示控制时间。
[0023]
在其中一个实施例中,根据快速终端滑模面设计连续控制力矩姿态控制器,包括:
[0024][0025][0026]
δ=diag[δ1,δ2,δ3],δi>1
[0027][0028][0029]
其中,j为卫星的转动惯量;w为卫星角速度;qe为偏差姿态四元数矢部;q
e0
为偏差姿态四元数标部;wd为期望角速度;tf为时间参数;i为单位阵;为qe的反对称阵;ld为干扰力矩,lc表示控制力矩,表示期望角速度的时间导数,sgn()表示符号函数,φi表示控制参数。
[0030]
在其中一个实施例中,pwpf脉冲调制器为
[0031][0032]
其中,u为输入信号;为触发器输出的反馈;δ为驱动触发器的信号;km和tm为两个标量参数。
[0033]
一种全电卫星的开关式有限时间全局收敛姿态控制装置,所述装置包括:
[0034]
数据获取模块,用于获取当前时刻卫星的姿态四元数和角速度;预先设置卫星的期望姿态四元数和期望角速度;
[0035]
运动学关系式计算模块,用于根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度;对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式;
[0036]
构建快速终端滑模面模块,用于利用运动学关系式构建快速终端滑模面,根据快速终端滑模面设计连续控制力矩姿态控制器;
[0037]
确定开关状态模块,用于将连续控制力矩姿态控制器作为pwpf脉冲调制器的输入,得到三个体轴方向开关信号;根据三个体轴方向开关信号确定推力器的开关状态。
[0038]
一种航天器,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
[0039]
获取当前时刻卫星的姿态四元数和角速度;预先设置卫星的期望姿态四元数和期望角速度;
[0040]
根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度;
[0041]
对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式;
[0042]
利用运动学关系式构建快速终端滑模面,根据快速终端滑模面设计连续控制力矩姿态控制器;
[0043]
将连续控制力矩姿态控制器作为pwpf脉冲调制器的输入,得到三个体轴方向开关信号;根据三个体轴方向开关信号确定推力器的开关状态。
[0044]
上述一种全电卫星的开关式有限时间全局收敛姿态控制方法、装置、航天器,本技术根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度;对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式;通过约束姿态跟踪误差可以按照期望设计满足指定性能指标的控制力矩形式,具有较高的系统鲁棒性和姿态控制精度,且全局收敛,利用运动学关系式构建快速终端滑模面,根据快速终端滑模面设计连续控制力矩姿态控制器,通过构建快速终端滑模面,设计具有固定时间收敛特性和姿态跟踪误差受约束的连续控制力矩姿态控制器,其输出的连续控制力矩,作为pwpf脉冲调制器的输入,最后以调制器输出的三个
体轴方向开关信号,决定推力器的开关状态,采用滑模面设计具有固定时间收敛特性和姿态跟踪误差受约束的连续控制力矩姿态控制器,具有对外界扰动抗干扰能力强、姿态跟踪误差全局收敛、匹配电推力器的开关操作特性等优点,具有较强的应用价值,可广泛应用于其他飞行器姿态控制系统设计中。
附图说明
[0045]
图1为一个实施例中一种全电卫星的开关式有限时间全局收敛姿态控制方法的流程示意;
[0046]
图2为一个实施例中日定向模式中的指向误差角γ的时间变化过程的示意图;
[0047]
图3为一个实施例中对日定向模式中的推力时间变化过程的示意图;
[0048]
图4为一个实施例中一种全电卫星的开关式有限时间全局收敛姿态控制装置的结构框图;
[0049]
图5为一个实施例中计算机设备的内部结构图。
具体实施方式
[0050]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
[0051]
在一个实施例中,如图1所示,提供了一种全电卫星的开关式有限时间全局收敛姿态控制方法,包括以下步骤:
[0052]
步骤102,获取当前时刻卫星的姿态四元数和角速度;预先设置卫星的期望姿态四元数和期望角速度。
[0053]
根据具体卫星任务要求,预先设置卫星的期望姿态四元数和期望角速度,设卫星质量为41kg,轨道为500km高的太阳同步轨道,其惯量阵为:
[0054][0055]
初始姿态四元数和角速度分别为:
[0056][0057]
w=[0.06,0.06,0.06]
t
(deg/s)
[0058]
太阳定向模式下,卫星太阳阵的法向量应首先指向太阳,然后在惯性空间中保持与太阳的方向平行。电池阵法向量和太阳方向之间的角差(用γ表示)用于评价控制器的性能。
[0059]
步骤104,根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度;对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式。
[0060]
步骤106,利用运动学关系式构建快速终端滑模面,根据快速终端滑模面设计连续
控制力矩姿态控制器。
[0061]
利用运动学关系式构建快速终端滑模面,通过约束姿态跟踪误差可以按照期望设计满足指定性能指标的控制力矩形式,具有较高的系统鲁棒性和姿态控制精度,且全局收敛,采用滑模面设计具有固定时间收敛特性和姿态跟踪误差受约束的连续控制力矩姿态控制器,具有对外界扰动抗干扰能力强、姿态跟踪误差全局收敛、匹配电推力器的开关操作特性等优点。
[0062]
步骤108,将连续控制力矩姿态控制器作为pwpf脉冲调制器的输入,得到三个体轴方向开关信号;根据三个体轴方向开关信号确定推力器的开关状态。
[0063]
将具有固定时间收敛特性和姿态跟踪误差受约束的连续控制力矩姿态控制器,其输出的连续控制力矩,作为pwpf脉冲调制器的输入,最后以调制器输出的三个体轴方向开关信号,决定推力器的开关状态。
[0064]
上述一种全电卫星的开关式有限时间全局收敛姿态控制方法中,本技术根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度;对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式;通过约束姿态跟踪误差可以按照期望设计满足指定性能指标的控制力矩形式,具有较高的系统鲁棒性和姿态控制精度,且全局收敛,利用运动学关系式构建快速终端滑模面,根据快速终端滑模面设计连续控制力矩姿态控制器,通过构建快速终端滑模面,设计具有固定时间收敛特性和姿态跟踪误差受约束的连续控制力矩姿态控制器,其输出的连续控制力矩,作为pwpf脉冲调制器的输入,最后以调制器输出的三个体轴方向开关信号,决定推力器的开关状态,采用滑模面设计具有固定时间收敛特性和姿态跟踪误差受约束的连续控制力矩姿态控制器,具有对外界扰动抗干扰能力强、姿态跟踪误差全局收敛、匹配电推力器的开关操作特性等优点,具有较强的应用价值,可广泛应用于其他飞行器姿态控制系统设计中。
[0065]
在其中一个实施例中,根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度,包括:
[0066]
根据期望姿态四元数和当前时刻卫星的姿态四元数进行误差计算,得到姿态跟踪误差四元数为
[0067][0068]
其中,表示当前时刻卫星的姿态四元数,表示期望姿态四元数,t表示转置运算,q
e0
表示的标部,表示的矢部;
[0069]
根据期望角速度和当前时刻卫星的角速度进行误差计算,得到误差角速度为we=w-wd,其中wd表示期望角速度,w表示当前时刻卫星的角速度。
[0070]
在其中一个实施例中,对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式,包括:
[0071]
对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式为
[0072][0073]
其中,其中,表示q
e0
的时间导数,表示qe的时间导数。
[0074]
在其中一个实施例中,利用运动学关系式构建快速终端滑模面,包括:
[0075]
利用运动学关系式构建快速终端滑模面为
[0076]
其中,δ=diag[δ1,δ2,δ3],δi>1,tf为时间参数,t表示控制时间。
[0077]
在其中一个实施例中,根据快速终端滑模面设计连续控制力矩姿态控制器,包括:
[0078][0079][0080][0081][0082][0083]
其中,j为卫星的转动惯量;ω为卫星角速度;qe为偏差姿态四元数矢部;q
e0
为偏差姿态四元数标部;ωd为期望角速度;tf为时间参数;i为单位阵;为qe的反对称阵;ld为干扰力矩,lc表示控制力矩,表示期望角速度的时间导数,sgn()表示符号函数,φi表示控制参数。
[0084]
在其中一个实施例中,pwpf脉冲调制器为
[0085][0086]
其中,u为输入信号;为触发器输出的反馈;δ为驱动触发器的信号;km和tm为两个标量参数。
[0087]
在一个实施例中,如图2所示,可见控制过程几乎无超调,指向误差角γ小于0.02
°
,稳定精度高。如图3所示为最终输出为开关信号,本技术针对全电卫星的开关式有限时间全局收敛姿态控制方法符合小推力器的工作模式要求。
[0088]
应该理解的是,虽然图1的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图1中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0089]
在一个实施例中,如图4所示,提供了一种全电卫星的开关式有限时间全局收敛姿态控制装置,包括:数据获取模块402、运动学关系式计算模块404、构建快速终端滑模面模块406和确定开关状态模块408,其中:
[0090]
数据获取模块402,用于获取当前时刻卫星的姿态四元数和角速度;预先设置卫星的期望姿态四元数和期望角速度;
[0091]
运动学关系式计算模块404,用于根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度;对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式;
[0092]
构建快速终端滑模面模块406,用于利用运动学关系式构建快速终端滑模面,根据快速终端滑模面设计连续控制力矩姿态控制器;
[0093]
确定开关状态模块408,用于将连续控制力矩姿态控制器作为pwpf脉冲调制器的输入,得到三个体轴方向开关信号;根据三个体轴方向开关信号确定推力器的开关状态。
[0094]
在其中一个实施例中,运动学关系式计算模块404还用于根据期望姿态四元数和期望角速度和当前时刻卫星的姿态四元数和角速度进行误差计算,得到姿态跟踪误差四元数和误差角速度,包括:
[0095]
根据期望姿态四元数和当前时刻卫星的姿态四元数进行误差计算,得到姿态跟踪误差四元数为
[0096][0097]
其中,表示当前时刻卫星的姿态四元数,表示期望姿态四元数,t表示转置运算,q
e0
表示的标部,表示的矢部;
[0098]
根据期望角速度和当前时刻卫星的角速度进行误差计算,得到误差角速度为we=w-wd,其中wd表示期望角速度,w表示当前时刻卫星的角速度。
[0099]
在其中一个实施例中,运动学关系式计算模块404还用于对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式,包括:
[0100]
对姿态跟踪误差四元数和误差角速度进行计算,得到两者之间的运动学关系式为
[0101][0102]
其中,其中,表示q
e0
的时间导数,表示qe的时间导数。
[0103]
在其中一个实施例中,构建快速终端滑模面模块406还用于利用运动学关系式构建快速终端滑模面,包括:
[0104]
利用运动学关系式构建快速终端滑模面为
[0105]
其中,δ=diag[δ1,δ2,δ3],δi>1,tf为时间参数,t表示控制时间。
[0106]
在其中一个实施例中,构建快速终端滑模面模块406还用于根据快速终端滑模面设计连续控制力矩姿态控制器,包括:
[0107][0108][0109]
δ=diag[δ1,δ2,δ3],δi>1
[0110][0111][0112]
其中,j为卫星的转动惯量;w为卫星角速度;qe为偏差姿态四元数矢部;q
e0
为偏差姿态四元数标部;wd为期望角速度;tf为时间参数;i为单位阵;为qe的反对称阵;ld为干扰力矩,lc表示控制力矩,表示期望角速度的时间导数,sgn()表示符号函数,φi表示控制参数。
[0113]
在其中一个实施例中,pwpf脉冲调制器为
[0114][0115]
其中,u为输入信号;为触发器输出的反馈;δ为驱动触发器的信号;km和tm为两个
标量参数。
[0116]
关于一种全电卫星的开关式有限时间全局收敛姿态控制装置的具体限定可以参见上文中对于一种全电卫星的开关式有限时间全局收敛姿态控制方法的限定,在此不再赘述。上述一种全电卫星的开关式有限时间全局收敛姿态控制装置中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0117]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本技术所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0118]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0119]
以上所述实施例仅表达了本技术的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。