基于被囊群优化的rbf神经网络的混沌控制方法
技术领域
1.本发明涉及一种基于被囊群优化的rbf神经网络的混沌控制方法。
背景技术:
2.碰撞振动现象已经普遍存在于现在的实际工程技术领域当中。在土木,机械, 宇航等领域,都出现一些由间隙造成的冲击振动。这样反复的撞击动作会造成现代机械设计中的一些部分区域发生系统的疲劳破坏,甚至导致系统出现不平衡的动作,危及系统运行安全。所以,针对工程实践中的实际需要,对碰撞振动系统中的混沌过程加以有效控制,可以实现该类系统的平稳动态行为,从而降低了因其不平稳动态行为而带来的无谓的经济损失,并延长设备的使用寿命是十分必要并富有现实工程效益的。
3.分岔和混沌是非线性问题中普遍存在的现象。它们是一种复杂的动力学行为。如果某个动力系统是结构不稳定,任意一点波动都会引起系统的结构突变, 这种变化叫做分岔。
4.碰撞振动系统的混沌运动是非线性系统特有的一种动力学性态。现有混沌控制方法参数调整控制法与反馈控制法已经不仅是一种非常成熟而且应用广泛的控制方法。但是缺陷在于:如果控制系统需要一种比较准确的模型和提供目标函数或者说是轨迹,也是仅提供观察数据信息而又缺乏具体化的模型时,参数调整管理方法和反馈控制法都是不可直接利用的。工程实践中因为混沌体系的复杂性,体系的分析模型常常是不知或无法准确获取的,而且实际系统的参数也是变化的。为此,对于探讨并提供不依赖于控制对象准确模型,仅应用于控制系统的输入/输出数据以实现混沌系统的控制策略与分析方法,将有着重要的基础理论科学研究价值和意义。
技术实现要素:
5.本发明的目的在于提供一种基于被囊群优化的rbf神经网络的混沌控制方法。
6.为解决上述问题,本发明提供一种基于被囊群优化的rbf神经网络的混沌控制方法,包括:
7.构建系统力学模型,通过poincare截面研究和确定含间隙碰撞振动体系中的混沌运动情况;
8.采用rbf神经网络设计的混沌控制器,并构造适应度函数;
9.通过被囊群优化算法调整rbf神经网络参数。
10.进一步的,在上述方法中,构建系统力学模型,通过poincare截面研究和确定含间隙碰撞振动体系中的混沌运动情况,包括:
11.通过数值仿真poincare截面上的混沌吸引子来研究系统的运动特性,即如果poincare截面表现为一点,且系统的状态量在相空间的轨迹上表现为一条极环时,就表明系统在做极限环运动;
12.如果poincare截面上只有一个点或只有少数混沌吸引子,且系统的状态量在相空
间的轨迹表现为一条或多个闭合的曲线时,则系统在做周期运动;如果 poincare截面上有无数个混沌吸引子,且这些混沌吸引子都沿着一条封闭的曲线呈现时,系统在做准周期运动;
13.如果在poincare截面上呈现成片并且带有分形特征结构的密集点,同时系统的状态量在相空间的轨迹表现为杂乱无序且不重叠也不互交的稠密轨道时,系统处于混沌运动状态。
14.进一步的,在上述方法中,采用rbf神经网络设计的混沌控制器,并构造适应度函数,包括:
15.基于参数反馈混沌控制法的基本原理调节混乱运动,即采用rbf神经网络混沌控制器,产生一个个小干扰产生给整个系统的可控参,再经过对系统可控制参进行动态的微幅调节,进而把混乱运动调节至理想的周期运动。rbf神经网络是分为输入层、隐层和输出层的3层结构,在设计基于rbf神经网络混沌控制器时,根据混沌运动控制目标,控制器的输入定义为:将能够反映系统趋近于稳定的周期1-1运动趋势的k次迭代后poincare截面上的投影点与系统经k -1次迭代后poincare截面上的投影点间的距离(即d(k)=x(k)-x(k-1))、以及系统经k-1次迭代后poincare截面上的投影点与系统经k-2次迭代后 poincare截面上的投影点间的距离,即d(k-1)=x(-1k)-x(k-2),把系统激励频率或阻尼系数的微幅调整量,即控制器输出小扰动量施加于系统的一个可控参数作为控制器的输出。
16.进一步的,在上述方法中,通过被囊群优化算法调整rbf神经网络参数,包括:
17.对于混沌控制器设计时需确定的参数,本发明采用被囊群优化算法(简称 tsa算法)。被囊群优化算法采用两种策略来更真实地模拟海洋中被囊动物群体觅食行为,为喷气推进行为和群体行为。这使得算法实现简单、跳出局部最优能力强、寻优精度高。同时利用混沌序列来初始化种群,增强了个体搜索初期的遍历性。
18.本发明首次应用基于rbf神经网络的智能优化控制方法来研究一类含间隙碰撞振动系统混沌运动的控制问题。
19.本发明首次使用被囊群优化算法算法优化混沌控制器的参数。
20.本发明提出了一个基于被囊群优化rbf神经网路设置的混沌控制器的算法, 该计算是利用不依赖于被控目标精细模型的rbf神经网络设置混沌控制器的,并利用被囊群优化算法来优化设计混沌控制器的过程参数。通过对系统可控制参数进行小干扰,达到产生预期周期动作的目的。针对不同的预期目标,能够在很短的时期内于一定的目标周期轨迹上实现探索与稳定,同时降低了控制器对人工干涉的依赖性。
附图说明
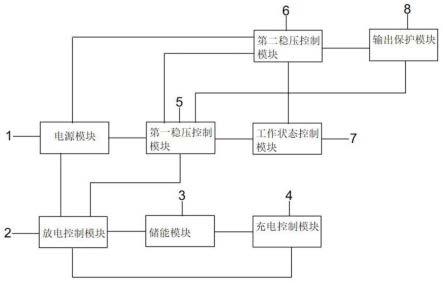
21.图1是本发明一实施例的基于被囊群优化的rbf神经网络的混沌控制方法的控制系统结构框图;
22.图2是本发明一实施例的单自由度含间隙碰撞振动系统的力学模型示意图;
23.图3是本发明一实施例的数值模拟系统的分叉现象示意图;
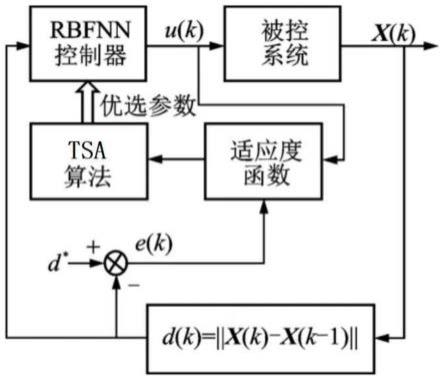
24.图4是本发明一实施例的控制器结构示意图;
25.图5是本发明一实施例的tsa算法流程图。
具体实施方式
26.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
27.如图1所示,本发明提供一种基于被囊群优化的rbf神经网络的混沌控制方法,包括:
28.构建系统力学模型,通过poincare截面研究和确定含间隙碰撞振动体系中的混沌运动情况;
29.采用rbf神经网络设计的混沌控制器,并构造适应度函数;
30.通过被囊群优化算法调整rbf神经网络参数。
31.进一步的,在上述方法中,构建系统力学模型,通过poincare截面研究和确定含间隙碰撞振动体系中的混沌运动情况,包括:
32.通过数值仿真poincare截面上的混沌吸引子来研究系统的运动特性,即如果poincare截面表现为一点,且系统的状态量在相空间的轨迹上表现为一条极环时,就表明系统在做极限环运动;
33.如果poincare截面上只有一个点或只有少数混沌吸引子,且系统的状态量在相空间的轨迹表现为一条或多个闭合的曲线时,则系统在做周期运动;如果 poincare截面上有无数个混沌吸引子,且这些混沌吸引子都沿着一条封闭的曲线呈现时,系统在做准周期运动;
34.如果在poincare截面上呈现成片并且带有分形特征结构的密集点,同时系统的状态量在相空间的轨迹表现为杂乱无序且不重叠也不互交的稠密轨道时,系统处于混沌运动状态。
35.进一步的,在上述方法中,采用rbf神经网络设计的混沌控制器,并构造适应度函数,包括:
36.基于参数反馈混沌控制法的基本原理调节混乱运动,即采用rbf神经网络混沌控制器,产生一个个小干扰产生给整个系统的可控参,再经过对系统可控制参进行动态的微幅调节,进而把混乱运动调节至理想的周期运动。rbf神经网络是分为输入层、隐层和输出层的3层结构,在设计基于rbf神经网络混沌控制器时,根据混沌运动控制目标,控制器的输入定义为:将能够反映系统趋近于稳定的周期1-1运动趋势的k次迭代后poincare截面上的投影点与系统经k -1次迭代后poincare截面上的投影点间的距离(即d(k)=x(k)-x(k-1))、以及系统经k-1次迭代后poincare截面上的投影点与系统经k-2次迭代后 poincare截面上的投影点间的距离,即d(k-1)=x(-1k)-x(k-2),把系统激励频率或阻尼系数的微幅调整量,即控制器输出小扰动量施加于系统的一个可控参数作为控制器的输出。
37.进一步的,在上述方法中,通过被囊群优化算法调整rbf神经网络参数,包括:
38.对于混沌控制器设计时需确定的参数,本发明采用被囊群优化算法(简称 tsa算法)。被囊群优化算法采用两种策略来更真实地模拟海洋中被囊动物群体觅食行为,为喷气推进行为和群体行为。这使得算法实现简单、跳出局部最优能力强、寻优精度高。同时利用混沌序列来初始化种群,增强了个体搜索初期的遍历性。
39.本发明首次应用基于rbf神经网络的智能优化控制方法来研究一类含间隙碰撞振动系统混沌运动的控制问题。
40.本发明首次使用被囊群优化算法算法优化混沌控制器的参数。
41.本发明提出了一个基于被囊群优化rbf神经网路设置的混沌控制器的算法, 该计算是利用不依赖于被控目标精细模型的rbf神经网络设置混沌控制器的,并利用被囊群优化算法来优化设计混沌控制器的过程参数。通过对系统可控制参数进行小干扰,达到产生预期周期动作的目的。针对不同的预期目标,能够在很短的时期内于一定的目标周期轨迹上实现探索与稳定,同时降低了控制器对人工干涉的依赖性。
42.具体的,本发明包括:
43.1.建立系统力学模型
44.图2所示为一类单自由度含间隙碰撞振动系统的典型代表。质量块的质量用m表示,其位移用x表示,质量块与左侧刚性约束之间由刚度为k的线性弹簧和阻尼系数为c的线性阻尼器相连,当质量块m处于平衡位置时,其与右侧刚性约束的间隙为b。作用在质量块上的简谐激振力为fsin(ωt τ)。
45.若碰撞持续时间忽略不计,则图2所示系统运动微分方程进行无量纲变换,得:
46.其中分别为质量块m与右侧刚性约束碰撞前后的瞬时速度。
47.同时选择碰撞后瞬时的σ截面为poincare截面来研究图2所示系统动力学演化机理,σ截面为其中,θ=ωtmod2nπ,以影响系统动力学特性的参数(即简谐激振力频率ω)为分岔参数,取ζ=0.2,r=0.8,b=0.05,数值模拟系统状态x随简谐激振力频ω变化所产生的分岔现象,如图三所示。
48.由图3可知,当简谐激振力频率ω在一定范围区域内变化时,图1所示系统具有稳定的周期n-1运动(n表示周期数,1表示碰撞次数;如当ω∈ [2.50,2.55]时,图1所示系统具有稳定的周期1-1运动),但随着ω增大,系统则会发生倍周期分岔,并最终演化为混沌运动,且在混沌运动过程中还具有一些周期窗口;随着ω的进一步增大,混沌运动又会退化为周期运动。
[0049]
2.设计基于rbf神经网络的混沌控制器
[0050]
利用poincare截面分析和判断含间隙碰撞振动系统的混沌运动行为,进而设计基于rbf神经网络的混沌控制器。根据混沌运动控制目标,将能够反映系统趋近于稳定的周期1-1动趋势的k次迭代后poincare截面上的投影点与系统经k-1次迭代后poincare截面上的投影点间的距离(即d(k)=||x(k)-x(k-1)||)、以及系统经k-1次迭代后poincare截面上的投影点与系统经k-2次迭代后 poincare截面上的投影点间的距离(即d(k-1)=||x(k-1)-x(k-2)||)作为控制器的输入,控制器的输出则定义为系统激励频率或阻尼系数的微幅调整量(即控制器输出小扰动量施加于系统的一个可控参数)。由此得控制器的结构如图4所示。
[0051]
图4中d(k)为poincare截面上相邻两点之间的距离,d(k)=||x(k)-x(k-1)||,其中,x(k)为受控系统状态变量x在k时刻的值;u为rbf神经网络混沌控制器输出的扰动量,为保持控制的有效性,设定最大扰动量为u
max
,则-u
max
<u< u
max
;w∈rh×m为连接隐层和输出
层的权矩阵;网络具有h个隐节点,ci是隐节点的中心,φi(||d-ci||)高斯函数,且
[0052]
3.优化混沌控制器参数
[0053]
本发明在优化混沌控制器上的参数时,采用被囊群优化算法使适应度函数取得最小值的全局最优位置,即优化rbf神经网络混沌控制器的参数ω,σ和c。并改进被囊群优化算法,采用混沌序列初始化种群,增强了个体搜索初期的遍历性。
[0054]
算法流程为:
[0055]
(1)采用混沌序列初始化种群;
[0056]
(2)初始化种群参数,边界条件;
[0057]
(3)计算每个个体的适应度值;
[0058]
(4)根据喷气推进行为搜索最佳个体的位置;
[0059]
(5)根据群体行为更新每个个体位置;
[0060]
(6)如果满足停止条件,则停止算法,否则重复步骤(3)-(5);
[0061]
(7)返回最优值。
[0062]
由此得tsa算法流程如图5所示。
[0063]
具体步骤为:
[0064]
步骤1、建立单自由度含间隙碰撞振动系统的力学模型,选择碰撞后瞬时的σ截面为poincare截面来研究系统动力学演化机理;
[0065]
步骤2、初始化rbf神经网络参数,由rbf神经网络的参数组成被囊种群;设定的rbf神经网络结构中,将d(k-1),d(k)做为网络的输入,将系统激励频率或阻尼系数的微幅调整量(即控制器输出小扰动量施加于系统的一个可控参数)为网络的输出;rbf神经网络具有h个隐节点,径向基函数的中心为c1, c2,
…
,ch;网络宽度为d1,d2,
…
,dh;联结权值为w1,w2,
…
,wh;则由rbf 神经网络参数构成的被囊种群为:w=[c1,c2,
…
,ch,d1,d2,
…
,dh,w1, w2,
…
,wh];
[0066]
步骤3、对rbf神经网络进行初始网络训练得到网络宽度、中心和权值,进行实值编码,再采用混沌序列得到初始被囊种群;
[0067]
步骤4、对被囊种群个体进行越界处理,计算被囊个体适应度值,适应度值为rbf神经网络输出预测值和实网络宽度、中心和权值际值的最小均方误差;
[0068]
步骤5、对被囊种群进行寻优更新;根据tsa算法更新囊种种群并采用适应度函数计算个体适应度值;
[0069]
5.1、避免搜索个体冲突,计算位向量:
[0070]
其中:g表示重力,;m表示搜索个体之间的社会力量 m=|p
min
c1(p
max
-p
min
)|,p
max
、p
min
为社交活动的最大值和最小值,c1为[0,1] 内的随机数;
[0071]
5.2、在避免邻居之间的冲突后,搜索个体朝着最佳邻居的方向发展,此时需要计算搜索个体与食物源之间的距离.第t次迭代时第i个个体与食物来源之间的距离为
其中,rand为满足[0,1]均匀分布的随机数,为第t次迭代时种群食物来源位置,即当前种群最优个体位置,为第t次迭代时种群第i个个体位置.搜索个体向最佳食物源位置移动,即其中,为第t次迭代时种群食物来源位置,a为个体避免冲突计算的位置向量,为当前第i个个体与食物来源之间的距离。
[0072]
5.3、在个体采用群体行为向食物源聚集,定义群体行为: 其中,表示上一代被囊个体相对于食物源更新后的位置,c1表示[0,1]内的随机数。
[0073]
步骤6、判定是否满足结束条件,即达到给定的最大迭代次数;若满足则输出被囊种群中最优个体位置;反之跳转到步骤5继续执行优化;
[0074]
步骤7、更新rbf神经网络的参数(网络宽度、中心和权值),通过更新后的rbf混沌控制器输出微小扰动控制系统。
[0075]
综上所述,为了弥补现有碰撞振动系统中混沌控制方式的缺陷,本发明针对一种含间隙碰撞振动系统中混沌控制器问题,提供了一个新的基于被囊群优化算法rbf神经网络的混沌控制策略,利用不依赖于被控目标精细模型的rbf神经网络设置混沌控制器的,并利用被囊群优化算法来优化设计混沌控制器的过程参数。通过对系统可控制参数进行小干扰,达到产生预期周期动作的目的。针对不同的预期目标,能够在很短的时期内于一定的目标周期轨迹上实现探索与稳定,同时降低了控制器对人工干涉的依赖性。
[0076]
本发明具体通过如下技术方案实现:
[0077]
本发明应用于rbf神经网路设计混沌控制器,通过混沌运动的控制目标确定了rbf神经网路输入层、输出层中的重要节点。利用输入层空间结构到隐藏层空间的非线性变换和从隐藏层空间到输入输出层空间结构的线性变换,能够完成从进入层空间结构到输入输出层空间结构的映射过程。以poincare截面上相邻两点的距离为依据,构建了适应度函数。通过构建的适应性函数引导,被囊群优化算法可以实现对rbf神经网络混沌控制器函数的调整。最后通过对系统可控参数增加一个最小影响变量,实现让控制系统有周期运行的目的。
[0078]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0079]
专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。显然,本领域的技术人员可以对发明进行各种改动和变型而不脱
离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包括这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。