1.本发明涉及自动驾驶技术领域,尤其涉及一种用于匝道的车辆速度控制方法、系统、车辆及存储介质。
背景技术:
2.车辆智能化是汽车未来发展的必然趋势,其中自动驾驶算法是实现其高度智能化的“大脑”系统。自动驾驶作为当下汽车行业最为前沿的技术,国内外各大主机厂以及供应商都不断地增加在汽车自动驾驶领域的布局。2021年的上海车展作为中国汽车智能化的元年,科技巨头、造车新势力和传统车企均带来了行业领先的自动驾驶解决方案。
3.目前,自动驾驶解决方案中,当车辆进入匝道时,通常需要对车辆进行限速,保证车辆在匝道转弯时的安全性,并在车辆驶离匝道时,再提高车辆的限速阈值,保证车辆安全进入主路。但是现有的匝道限速方法通常以摄像头或雷达作为匝道识别依据,由于道路存在环境能见度差、路况多种多样的情况,在实际运用中常常出现识别错误、识别遗漏的情况,导致匝道识别的准确率较低,无法准确控制车速,自动驾驶的安全性较差。
技术实现要素:
4.为了对披露的实施例的一些方面有基本的理解,下面给出了简单的概括。所述概括不是泛泛评述,也不是要确定关键/重要组成元素或描绘这些实施例的保护范围,而是作为后面的详细说明的序言。
5.鉴于以上所述现有技术的缺点,本发明公开了一种用于匝道的车辆速度控制方法、系统、车辆及存储介质,以提高匝道识别准确率,从而提高匝道内车速控制的准确率。
6.本发明公开了一种用于匝道的车辆速度控制方法,包括:获取导航地图信息,所述导航地图信息包括目标匝道的匝道限速路段、当前车辆的实时位置信息;若所述当前车辆行驶在所述匝道限速路段内,则激活所述当前车辆的匝道限速状态;响应于所述匝道限速状态被激活,根据所述实时位置信息确定所述当前车辆与所述匝道限速路段之间的限速标志位,其中,所述限速标志位包括驶入目标匝道、行驶在目标匝道、驶出目标匝道中的至少一种;根据所述限速标志位从预设的最高车速阈值中匹配出目标车速阈值,并将所述当前车辆的实时车速控制在所述目标车速阈值内,其中,所述驶入目标匝道对应的最高车速阈值、所述驶出目标匝道对应的最高车速阈值均大于所述行驶在目标匝道的最高车速阈值。
7.可选地,所述实时位置信息包括以下至少一种:所述当前车辆分别与所述目标匝道中各位置标识点之间的标识点距离,其中,所述位置标识点包括匝道分流起点、匝道分流终点、匝道汇流起点和匝道汇流终点中的至少一种;各所述位置标识点分别与所述当前车辆之间的方向信息,其中,所述方向信息包括行驶方向正方向或行驶方向反方向;所述当前车辆与所述目标匝道之间的进出匝道信息,其中,所述进出匝道信息包括位于目标匝道入口前、位于目标匝道中或位于目标匝道出口;所述当前车辆所在的行驶车道类型,其中,所述行驶车道类型包括所述目标匝道、匝道驶入车道或匝道加速车道。
8.可选地,若满足预设的驶入判定条件,则将所述限速标志位确定为驶入目标匝道,其中,所述驶入判定条件包括:所述匝道分流终点位于所述当前车辆的行驶方向正方向上;所述匝道分流终点与所述当前车辆的标识点距离小于预设的驶入缓冲距离;所述进出匝道信息包括位于目标匝道入口前;所述行驶车道类型包括所述目标匝道或所述匝道驶入车道。
9.可选地,若满足预设的行驶判定条件,则将所述限速标志位确定为行驶在目标匝道,其中,所述行驶判定条件包括:所述行驶车道类型包括所述目标匝道或所述匝道驶入车道;所述进出匝道信息包括位于目标匝道中或位于目标匝道出口;若所述进出匝道信息包括位于目标匝道入口前,则所述匝道分流终点位于所述当前车辆的行驶方向正方向上,且,所述匝道分流终点与所述当前车辆的标识点距离小于预设的行驶缓冲距离。
10.可选地,若满足预设的驶离判定条件,则将所述限速标志位确定为驶离目标匝道,其中,所述驶离判定条件包括:所述行驶车道类型包括所述目标匝道或匝道加速车道,或,所述进出匝道信息包括位于目标匝道出口;驶离标识点位于所述当前车辆的行驶方向正方向上,且,所述驶离标识点与所述当前车辆的标识点距离小于预设的驶离缓冲距离,其中,所述驶离标识点为匝道汇流起点或匝道汇流终点。
11.可选地,通过以下方式获取目标匝道的匝道限速路段:获取所述当前车辆的实时车速;根据所述实时车速确定限速缓冲距离,其中,所述限速缓冲距离与所述实时车速呈正相关关系;将限速路段起点与所述匝道汇流终点之间的路段确定为目标匝道的匝道限速路段,其中,所述限速路段起点与所述匝道分流起点之间的距离等于所述限速缓冲距离,且,所述匝道分流起点位于所述限速路段起点的行驶方向上。
12.可选地,通过以下方法确定所述行驶车道类型为匝道驶入车道:在目标匝道位于所述当前车辆所在的行驶车道的左侧的情况下,若位于所述行驶车道左侧的相邻车道类型包括所述目标匝道、应急车道或未知车道,则确定所述当前车辆所在的行驶车道类型为匝道驶入车道;在目标匝道位于所述当前车辆所在的行驶车道的右侧的情况下,若位于所述行驶车道右侧的相邻车道类型包括所述目标匝道、应急车道或未知车道,则确定所述当前车辆所在的行驶车道类型为匝道驶入车道。
13.可选地,获取导航地图信息之后,所述方法还包括以下至少一种:获取导航地图信息对应的地图置信度,若所述地图置信度小于预设的置信度阈值,则解除所述当前车辆的匝道限速状态;根据预设的有效值阈值区间对所述导航地图信息进行有效值判定,若判定结果包括判定失败,则解除所述当前车辆的匝道限速状态;获取所述当前车辆的自动驾驶状态,若所述自动驾驶状态包括未激活纵向控制,则解除所述当前车辆的匝道限速状态;获取当前车辆的定速巡航状态,若所述定速巡航状态包括已激活定速巡航,则解除所述当前车辆的匝道限速状态;若接收到用户输入的指定车速阈值,则解除所述当前车辆的匝道限速状态,并将所述当前车辆的实时车速控制在所述指定车速阈值内;若接收到用户输入的主动解除指令,则解除所述当前车辆的匝道限速状态。
14.可选地,根据所述限速标志位从预设的最高车速阈值中匹配出目标车速阈值之前,所述方法还包括:若接收到车速阈值修改指令,则根据所述车速阈值修改指令对至少一部分最高车速阈值进行修改。
15.本发明公开了一种用于匝道的车辆速度控制系统,包括:获取模块,用于获取导航
地图信息,所述导航地图信息包括目标匝道的匝道限速路段、当前车辆的实时位置信息;激活模块,用于若所述当前车辆行驶在所述匝道限速路段内,则激活所述当前车辆的匝道限速状态;确定模块,用于响应于所述匝道限速状态被激活,根据所述实时位置信息确定所述当前车辆与所述匝道限速路段之间的限速标志位,其中,所述限速标志位包括驶入目标匝道、行驶在目标匝道、驶出目标匝道中的至少一种;控制模块,用于根据所述限速标志位从预设的最高车速阈值中匹配出目标车速阈值,并将所述当前车辆的实时车速控制在所述目标车速阈值内,其中,所述驶入目标匝道对应的最高车速阈值、所述驶出目标匝道对应的最高车速阈值均大于所述行驶在目标匝道的最高车速阈值。
16.本发明公开了一种电子设备,包括:处理器及存储器;所述存储器用于存储计算机程序,所述处理器用于执行所述存储器存储的计算机程序,以使所述电子设备执行上述的方法。
17.本发明公开了一种计算机可读存储介质,其上存储有计算机程序:所述计算机程序被处理器执行时实现上述的方法。
18.本发明的有益效果:
19.通过获取包含匝道限速路段和实时位置信息的导航地图信息,若当前车辆行驶在匝道限速路段内,则根据实时位置信息确定当前车辆与匝道限速路段之间的限速标志位,进而根据限速标志位匹配目标车速阈值,并将当前车辆的实时车速控制在目标车速阈值内,以对当前车辆实行限速。这样,相较于摄像头或雷达作为匝道识别依据,将导航地图作为依据确定当前车辆与目标匝道之间的位置关系,进而匹配得到目标车速阈值进行车辆限速,避免因环境能见度低、路况差等原因造成的匝道识别不准确的问题,从而提高车辆在匝道行驶的限速准确率,提高自动驾驶的安全性。
20.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
21.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术者来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
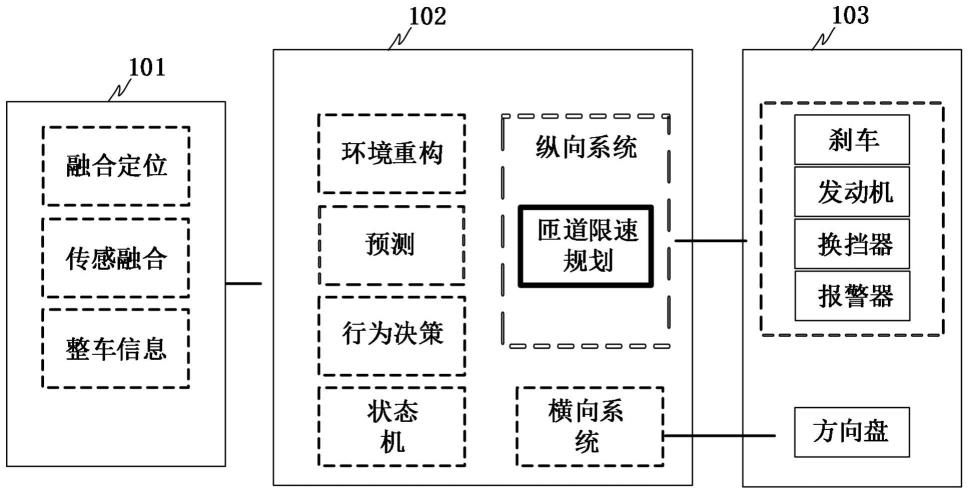
22.图1是本发明实施例中一个自动驾驶软件的构架示意图;
23.图2是本发明实施例中一个用于匝道的车辆速度控制方法的流程示意图;
24.图3是本发明实施例中一个限速匝道路段的示意图;
25.图4是本发明实施例中一个用于匝道的车辆速度控制系统的结构示意图;
26.图5是本发明实施例中一个电子设备的结构示意图。
具体实施方式
27.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离
本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的子样本可以相互组合。
28.需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,遂图式中仅显示与本发明中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
29.在下文描述中,探讨了大量细节,以提供对本发明实施例的更透彻的解释,然而,对本领域技术人员来说,可以在没有这些具体细节的情况下实施本发明的实施例是显而易见的,在其他实施例中,以方框图的形式而不是以细节的形式来示出公知的结构和设备,以避免使本发明的实施例难以理解。
30.本公开实施例的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本公开实施例的实施例。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含。
31.除非另有说明,术语“多个”表示两个或两个以上。
32.本公开实施例中,字符“/”表示前后对象是一种“或”的关系。例如,a/b表示:a或b。
33.术语“和/或”是一种描述对象的关联关系,表示可以存在三种关系。例如,a和/或b,表示:a或b,或,a和b这三种关系。
34.首先需要说明的是,自动驾驶系统是依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,能够让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆的一种汽车系统。自动驾驶系统通常通过视频摄像头、雷达传感器以及激光测距器来了解周围的交通状况,通过一个详尽的地图(通过有人驾驶汽车采集的地图)对前方的道路进行导航,通过通信技术、网络技术、计算机技术和控制技术实现对汽车的实时连续控制,并通过现代通信手段实现车与车之间、车与服务器之间的双向数据通信。
35.由于汽车行驶速度较快,自动驾驶系统通常会以秒作作为最小单位进行数据采集和状态刷新,以保证用户的安全和驾驶体验,其中,特定频率通常为0.02s。在其它的应用场景中,针对对象的行进道路的路况进行刷新的频率可以根据实际情况进行设置,本技术的实施例不对此进行限制。
36.结合图1所示,本公开实施例提供了一种自动驾驶软件的构架示意图,自动驾驶软件包括自动驾驶信息预处理系统101、自动驾驶控制器102和自动驾驶执行器103,其中,自动驾驶信息预处理系统101用于获取车辆数据,并对车辆数据进行融合;自动驾驶控制器102用于接收自动驾驶信息预处理系统101输出的车辆数据,对接收到的车辆数据进行环境重构、数据预测、行为决策,并通过状态机设置自动驾驶的状态信息,同时,自动驾驶控制器102包括纵向系统和横向系统,横向系统用于管理自动驾驶中的转弯,纵向系统用于管理自动驾驶中的前进和后退,纵向系统需要在车辆进入匝道时对车辆进行限速;自动驾驶执行器103包括刹车、发动机、换挡器、报警器和方向盘,刹车、发动机、换挡器、报警器通过自动驾驶控制器102的纵向系统控制,方向盘通过自动驾驶控制器102的横向系统控制。
37.结合图2所示,本公开实施例提供了一种用于匝道的车辆速度控制方法,包括:
38.步骤s201,获取导航地图信息;
39.其中,导航地图信息包括目标匝道的匝道限速路段、当前车辆的实时位置信息;
40.步骤s202,若当前车辆行驶在匝道限速路段内,则激活当前车辆的匝道限速状态;
41.步骤s203,响应于匝道限速状态被激活,根据实时位置信息确定当前车辆与匝道限速路段之间的限速标志位;
42.其中,限速标志位包括驶入目标匝道、行驶在目标匝道、驶出目标匝道中的至少一种;
43.步骤s204,根据限速标志位从预设的最高车速阈值中匹配出目标车速阈值,并将当前车辆的实时车速控制在目标车速阈值内;
44.其中,驶入目标匝道对应的最高车速阈值、驶出目标匝道对应的最高车速阈值均大于行驶在目标匝道的最高车速阈值。
45.采用本公开实施例提供的用于匝道的车辆速度控制方法,通过获取包含匝道限速路段和实时位置信息的导航地图信息,若当前车辆行驶在匝道限速路段内,则根据实时位置信息确定当前车辆与匝道限速路段之间的限速标志位,进而根据限速标志位匹配目标车速阈值,并将当前车辆的实时车速控制在目标车速阈值内,以对当前车辆实行限速。这样,相较于摄像头或雷达作为匝道识别依据,将导航地图作为依据确定当前车辆与目标匝道之间的位置关系,进而匹配得到目标车速阈值进行车辆限速,避免因环境能见度低、路况差等原因造成的匝道识别不准确的问题,从而提高车辆在匝道行驶的限速准确率,提高自动驾驶的安全性。
46.可选地,目标匝道包括多个位置标识点,其中,位置标识点包括匝道分流起点、匝道分流终点、匝道汇流起点和匝道汇流终点中的至少一种。
47.在一些实施例中,从高精度地图中获取地图数据,并基于地图数据生成导航地图信息,其中,地图数据包括地图置信度hpp_confidence、当前车道hpp_lane_type、左侧车道hpp_left_lane_type、右侧车道hpp_right_lane_type、匝道方向hpp_ramp_dirction、当前车辆与匝道分流起点之间的标识点距离hpp_to_planning_ramp_start_dis_erc、当前车辆与匝道分流终点之间的标识点距离hpp_to_planning_ramp_end_dis_erc、当前车辆与匝道汇流起点之间的标识点距离hpp_to_planning_mainroad_start_dis_erc、当前车辆与匝道汇流终点之间的标识点距离hpp_to_planning_mainroad_end_dis_erc、进出匝道信息hpp_enterramp_info等。
48.在一些实施例中,还需要获取自动驾驶状态的纵向控制状态sys_lngstate、当前车辆的实时车速esp_veh_spd、用户输入的指定车速阈值set_speed_source、巡航速度加速键状态grd_res_switch_sts、巡航速度加速键状态grd_set_switch_sts和车速阈值修改指令over_spd_offset。
49.可选地,获取导航地图信息之后,方法还包括以下至少一种:获取导航地图信息对应的地图置信度,若地图置信度小于预设的置信度阈值,则解除当前车辆的匝道限速状态;根据预设的有效值阈值区间对导航地图信息进行有效值判定,若判定结果包括判定失败,则解除当前车辆的匝道限速状态;获取当前车辆的自动驾驶状态,若自动驾驶状态包括未激活纵向控制,则解除当前车辆的匝道限速状态;获取当前车辆的定速巡航状态,若定速巡航状态包括已激活定速巡航,则解除当前车辆的匝道限速状态;若接收到用户输入的指定车速阈值,则解除当前车辆的匝道限速状态,并将当前车辆的实时车速控制在指定车速阈
值内;若接收到用户输入的主动解除指令,则解除当前车辆的匝道限速状态。
50.在一些实施例中,置信度阈值包括100%;当地图置信度为100%时,对以上高精度地图输入信号做有效值范围判定,当出现超出该范围的值的时候,输出一个不影响系统整体功能的无效值,并进行语音提示;当图置信度不为100%或纵向控制状态为纵向未激活时,关闭匝道限速功能,并进行语音提示。
51.在一些实施例中,通过语音输入接收指定车速阈值,解除当前车辆的匝道限速状态,并将当前车辆的实时车速控制在指定车速阈值内。
52.在一些实施例中,巡航速度加速键状态和巡航速度加速键状态确定当前车辆的定速巡航状态。
53.这样,通过对导航地图信息进行信息预处理,去除无效信息,从而提高识别准确率和鲁棒性。
54.可选地,通过以下方式获取目标匝道的匝道限速路段:获取当前车辆的实时车速;根据实时车速确定限速缓冲距离,其中,限速缓冲距离与实时车速呈正相关关系;将限速路段起点与匝道汇流终点之间的路段确定为目标匝道的匝道限速路段,其中,限速路段起点与匝道分流起点之间的距离等于限速缓冲距离,且,匝道分流起点位于限速路段起点的行驶方向上。
55.在一些实施例中,实时车速与限速缓冲距离之间的关系如表1所示。
56.表1
57.实时车速(km/h)6080100120限速缓冲距离(m)200340450600
58.可选地,实时位置信息包括以下至少一种:当前车辆分别与目标匝道中各位置标识点之间的标识点距离;各位置标识点分别与当前车辆之间的方向信息,其中,方向信息包括行驶方向正方向或行驶方向反方向;当前车辆与目标匝道之间的进出匝道信息,其中,进出匝道信息包括位于目标匝道入口前、位于目标匝道中或位于目标匝道出口;当前车辆所在的行驶车道类型,其中,行驶车道类型包括目标匝道、匝道驶入车道或匝道加速车道。
59.可选地,根据限速标志位从预设的最高车速阈值中匹配出目标车速阈值之前,方法还包括:若接收到车速阈值修改指令,则根据车速阈值修改指令对至少一部分最高车速阈值进行修改。
60.在一些实施例中,驶入目标匝道对应的最高车速阈值rampspslmt1=80km/h,驶出目标匝道对应的最高车速阈值rampspslmt2=60km/h,行驶在目标匝道的最高车速阈值rampspslmt3=80km/h。
61.在一些实施例中,为了适应不同驾驶员的驾驶习惯,通过按钮接收用户输入的车速阈值修改指令,修改范围为
±
10km/h,使得驾驶员通过该按键可以在一定范围内调节最高车速阈值。
62.可选地,通过以下方法确定行驶车道类型为匝道驶入车道:在目标匝道位于当前车辆所在的行驶车道的左侧的情况下,若位于行驶车道左侧的相邻车道类型包括目标匝道、应急车道或未知车道,则确定当前车辆所在的行驶车道类型为匝道驶入车道;在目标匝道位于当前车辆所在的行驶车道的右侧的情况下,若位于行驶车道右侧的相邻车道类型包括目标匝道、应急车道或未知车道,则确定当前车辆所在的行驶车道类型为匝道驶入车道。
63.在一些实施例中,满足以下任意条件时,行驶车道类型为匝道驶入车道的状态标志位ramplanesamesidejudge=1:
64.1)匝道方向为左侧时,当前车道hpp_lane_type为目标匝道;
65.2)匝道方向为左侧时,当前车道hpp_lane_type为主路且左侧车道类型hpp_left_lane_type为目标匝道、应急车道或者未知;
66.3)匝道方向为右侧时,当前车道hpp_lane_type为目标匝道;
67.4)匝道方向为右侧时,当前车道hpp_lane_type为主路且右侧车道类型hpp_right_lane_type为目标匝道、应急车道或者未知。
68.否则,行驶车道类型为匝道驶入车道的状态标志位ramplanesamesidejudge=0。
69.可选地,若满足预设的驶入判定条件,则将限速标志位确定为驶入目标匝道,其中,驶入判定条件包括:匝道分流终点位于当前车辆的行驶方向正方向上;匝道分流终点与当前车辆的标识点距离小于预设的驶入缓冲距离;进出匝道信息包括位于目标匝道入口前;行驶车道类型包括目标匝道或匝道驶入车道。
70.在一些实施例中,驶入缓冲距离包括200至2000m,例如,驶入缓冲距离为1200m。
71.在一些实施例中,根据当前车辆的实时车速确定驶入缓冲距离,如表2所示。
72.表2
73.实时车速(km/h)607795110驶入缓冲距离(m)200340450600
74.在一些实施例中,当满足以下所有条件时,驶入目标匝道的限速标志位splitspdlmtactive=1:
75.1)匝道分流终点与当前车辆的标识点距离hpp_to_planning_ramp_end_dis_erc属于0~1200米范围内;
76.2)进出匝道信息hpp_enterrampinfo表示匝道入口前;
77.3)自动驾驶状态的纵向控制状态sys_lngstate为纵向激活;
78.4)主动解除匝道限速状态rampoverridestate=0,即驾驶员未解除;
79.5)本车开在匝道侧车道上,即ramplanesamesidejudge=1。
80.否则,驶入目标匝道的限速标志位splitspdlmtactive=0。
81.可选地,若满足预设的行驶判定条件,则将限速标志位确定为行驶在目标匝道,其中,行驶判定条件包括:行驶车道类型包括目标匝道或匝道驶入车道;进出匝道信息包括位于目标匝道中或位于目标匝道出口;若进出匝道信息包括位于目标匝道入口前,则匝道分流终点位于当前车辆的行驶方向正方向上,且,匝道分流终点与当前车辆的标识点距离小于预设的行驶缓冲距离。
82.在一些实施例中,当满足以下任意条件时,行驶在目标匝道的限速标志位rampspdlmtactive=1:
83.1)自动驾驶状态的纵向控制状态为纵向激活;主动解除匝道限速状态rampoverridestate=0;本车开在匝道侧车道上,即ramplanesamesidejudge=1;若进出匝道信息包括位于目标匝道入口前;当前车辆与匝道汇流终点之间的标识点距离hpp_to_planning_ramp_end_dis_erc属于0~600米范围内;
84.2)自动驾驶状态的纵向控制状态为纵向激活;主动解除匝道限速状态
rampoverridestate=0;本车开在匝道侧车道上,即ramplanesamesidejudge=1;位于目标匝道中或位于目标匝道出口。
85.否则,行驶在目标匝道的限速标志位rampspdlmtactive=0。
86.可选地,若满足预设的驶离判定条件,则将限速标志位确定为驶离目标匝道,其中,驶离判定条件包括:行驶车道类型包括目标匝道或匝道加速车道,或,进出匝道信息包括位于目标匝道出口;驶离标识点位于当前车辆的行驶方向正方向上,且,驶离标识点与当前车辆的标识点距离小于预设的驶离缓冲距离,其中,驶离标识点为匝道汇流起点或匝道汇流终点。
87.在一些实施例中,当满足以下所有条件时,驶离目标匝道的限速标志位mergespdlmtactive=1:
88.1)自动驾驶状态的纵向控制状态为纵向激活;
89.2)主动解除匝道限速状态rampoverridestate=0;
90.3)进出匝道信息表示匝道出口,或者当前车道为目标匝道(本处指加速车道上);
91.4)当前车辆与匝道汇流起点之间的标识点距离或当前车辆与匝道汇流终点之间的标识点距离属于0~600米范围内。
92.否则,驶离目标匝道的限速标志位mergespdlmtactive=0。
93.结合图3所示,本公开实施例提供了一种限速匝道路段,包括匝道分流起点a、匝道分流终点b、匝道汇流起点c和匝道汇流终点d,其中,ab段为减速车道,cd段为加速车道,位于匝道分流终点b之前的驶入缓冲距离(1200m)为目标匝道的匝道入口,位于匝道汇流起点c之前的驶离缓冲距离(600m)为目标匝道的匝道出口,匝道分流终点b与目标匝道出口之间为目标匝道的匝道中。
94.若当前车辆通过目标匝道入口,将当前车辆的实时车速控制在80km/h;若当前车辆经过匝道分流起点a,依然将当前车辆的实时车速控制在80km/h,并逐渐向60km/h减速;若当前车辆经过匝道分流终点b,将当前车辆的实时车速控制在60km/h;当当前车辆与匝道汇流起点之间的标识点距离或当前车辆与匝道汇流终点之间的标识点距离属于0~600米范围内,则逐渐开始从60km/h加速至80km/h,准备提前汇入主路。
95.结合图4所示,本公开实施例提供了一种用于匝道的车辆速度控制系统,包括获取模块401、激活模块402、确定模块403和控制模块404。获取模块401用于获取导航地图信息,导航地图信息包括目标匝道的匝道限速路段、当前车辆的实时位置信息;激活模块402用于若当前车辆行驶在匝道限速路段内,则激活当前车辆的匝道限速状态;确定模块403用于响应于匝道限速状态被激活,根据实时位置信息确定当前车辆与匝道限速路段之间的限速标志位,其中,限速标志位包括驶入目标匝道、行驶在目标匝道、驶出目标匝道中的至少一种;控制模块404用于根据限速标志位从预设的最高车速阈值中匹配出目标车速阈值,并将当前车辆的实时车速控制在目标车速阈值内,其中,驶入目标匝道对应的最高车速阈值、驶出目标匝道对应的最高车速阈值均大于行驶在目标匝道的最高车速阈值。
96.采用本公开实施例提供的用于匝道的车辆速度控制系统,通过获取包含匝道限速路段和实时位置信息的导航地图信息,若当前车辆行驶在匝道限速路段内,则根据实时位置信息确定当前车辆与匝道限速路段之间的限速标志位,进而根据限速标志位匹配目标车速阈值,并将当前车辆的实时车速控制在目标车速阈值内,以对当前车辆实行限速。这样,
相较于摄像头或雷达作为匝道识别依据,将导航地图作为依据确定当前车辆与目标匝道之间的位置关系,进而匹配得到目标车速阈值进行车辆限速,避免因环境能见度低、路况差等原因造成的匝道识别不准确的问题,从而提高车辆在匝道行驶的限速准确率,提高自动驾驶的安全性。
97.图5示出了适于用来实现本技术实施例的电子设备的计算机系统的结构示意图。需要说明的是,图5示出的电子设备的计算机系统500仅是一个示例,不应对本技术实施例的功能和使用范围带来任何限制。
98.如图5所示,计算机系统500包括中央处理单元(central processing unit,cpu)501,其可以根据存储在只读存储器(read-only memory,rom)502中的程序或者从储存部分508加载到随机访问存储器(random access memory,ram)503中的程序而执行各种适当的动作和处理,例如执行上述实施例中所述的方法。在ram 503中,还存储有系统操作所需的各种程序和数据。cpu 501、rom 502以及ram 503通过总线504彼此相连。输入/输出(input/output,i/o)接口505也连接至总线504。
99.以下部件连接至i/o接口505:包括键盘、鼠标等的输入部分506;包括诸如阴极射线管(cathode ray tube,crt)、液晶显示器(liquid crystal display,lcd)等以及扬声器等的输出部分507;包括硬盘等的储存部分508;以及包括诸如lan(local area network,局域网)卡、调制解调器等的网络接口卡的通信部分509。通信部分509经由诸如因特网的网络执行通信处理。驱动器510也根据需要连接至i/o接口505。可拆卸介质511,诸如磁盘、光盘、磁光盘、半导体存储器等等,根据需要安装在驱动器510上,以便于从其上读出的计算机程序根据需要被安装入储存部分508。
100.特别地,根据本技术的实施例,上文参考流程图描述的过程可以被实现为计算机软件程序。例如,本技术的实施例包括一种计算机程序产品,其包括承载在计算机可读介质上的计算机程序,该计算机程序包含用于执行流程图所示的方法的计算机程序。在这样的实施例中,该计算机程序可以通过通信部分509从网络上被下载和安装,和/或从可拆卸介质511被安装。在该计算机程序被中央处理单元(cpu)501执行时,执行本技术的系统中限定的各种功能。
101.需要说明的是,本技术实施例所示的计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质或者是上述两者的任意组合。计算机可读存储介质例如可以是电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子可以包括但不限于:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机访问存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(erasable programmable read only memory,eprom)、闪存、光纤、便携式紧凑磁盘只读存储器(compact disc read-only memory,cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本技术中,计算机可读的信号介质可以包括在基带中或者作为载波一部分传播的数据信号,其中承载了计算机可读的计算机程序。这种传播的数据信号可以采用多种形式,包括但不限于电磁信号、光信号或上述的任意合适的组合。计算机可读的信号介质还可以是计算机可读存储介质以外的任何计算机可读介质,该计算机可读介质可以发送、传播或者传输用于由指令执行系统、装置或者器件使用或者与其结合使用的程序。计算机可读介质上包含的计算机程序可以用任何适当的介质传输,包括但不限于:无线、有线等
等,或者上述的任意合适的组合。
102.本公开实施例还提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现本实施例中的任一项方法。
103.本公开实施例中的计算机可读存储介质,本领域普通技术人员可以理解:实现上述各方法实施例的全部或部分步骤可以通过计算机程序相关的硬件来完成。前述的计算机程序可以存储于一计算机可读存储介质中。该程序在执行时,执行包括上述各方法实施例的步骤;而前述的存储介质包括:rom、ram、磁碟或者光盘等各种可以存储程序代码的介质。
104.本实施例公开的电子设备,包括处理器、存储器、收发器和通信接口,存储器和通信接口与处理器和收发器连接并完成相互间的通信,存储器用于存储计算机程序,通信接口用于进行通信,处理器和收发器用于运行计算机程序,使电子设备执行如上方法的各个步骤。
105.在本实施例中,存储器可能包含随机存取存储器(random access memory,简称ram),也可能还包括非易失性存储器(non-volatile memory),例如至少一个磁盘存储器。
106.上述的处理器可以是通用处理器,包括中央处理器(central processing unit,简称cpu)、图形处理器(graphics processing unit,简称gpu),网络处理器(network processor,简称np)等;还可以是数字信号处理器(digital signal processing,简称dsp)、专用集成电路(application specific integrated circuit,简称asic)、现场可编程门阵列(field-programmable gate array,简称fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件。
107.以上描述和附图充分地示出了本公开的实施例,以使本领域的技术人员能够实践它们。其他实施例可以包括结构的、逻辑的、电气的、过程的以及其他的改变。实施例仅代表可能的变化。除非明确要求,否则单独的部件和功能是可选地,并且操作的顺序可以变化。一些实施例的部分和子样本可以被包括在或替换其他实施例的部分和子样本。而且,本技术中使用的用词仅用于描述实施例并且不用于限制权利要求。如在实施例以及权利要求的描述中使用的,除非上下文清楚地表明,否则单数形式的“一个”(a)、“一个”(an)和“所述”(the)旨在同样包括复数形式。类似地,如在本技术中所使用的术语“和/或”是指包含一个或一个以上相关联的列出的任何以及所有可能的组合。另外,当用于本技术中时,术语“包括”(comprise)及其变型“包括”(comprises)和/或包括(comprising)等指陈述的子样本、整体、步骤、操作、元素,和/或组件的存在,但不排除一个或一个以上其它子样本、整体、步骤、操作、元素、组件和/或这些的分组的存在或添加。在没有更多限制的情况下,由语句“包括一个
…”
限定的要素,并不排除在包括所述要素的过程、方法或者设备中还存在另外的相同要素。本文中,每个实施例重点说明的可以是与其他实施例的不同之处,各个实施例之间相同相似部分可以互相参见。对于实施例公开的方法、产品等而言,如果其与实施例公开的方法部分相对应,那么相关之处可以参见方法部分的描述。
108.本领域技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,可以取决于技术方案的特定应用和设计约束条件。所述技术人员可以对每个特定的应用来使用不同方法以实现所描述的功能,但是这种实现不应认为超出本公开实施例的范围。所述技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的
系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
109.本文所披露的实施例中,所揭露的方法、产品(包括但不限于装置、设备等),可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,可以仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些子样本可以忽略,或不执行。另外,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例。另外,在本公开实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
110.附图中的流程图和框图显示了根据本公开实施例的系统、方法和计算机程序产品的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。在有些作为替换的实现中,方框中所标注的功能也可以以不同于附图中所标注的顺序发生。例如,两个连续的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这可以依所涉及的功能而定。在附图中的流程图和框图所对应的描述中,不同的方框所对应的操作或步骤也可以以不同于描述中所披露的顺序发生,有时不同的操作或步骤之间不存在特定的顺序。例如,两个连续的操作或步骤实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这可以依所涉及的功能而定。框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或动作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。