1.本发明属于新一代信息技术领域,具体指代一种卫星星座在轨分布式协同调度方法。
背景技术:
2.随着各国空间活动日益频繁,太空碎片,失效卫星等在空间常驻物体的数量增长迅速,威胁到了在轨航天器的安全。空间态势感知、空天安全是当前航空航天领域的研究热点。建设具备监视跟踪空间物体能力的卫星星座有望成为保障在轨航天器安全的重要手段。在星座跟踪过程中,太空碎片、失效卫星等物体为非合作目标,单颗卫星对目标进行仅测角观测所获得的信息无法确定目标位置,需要两颗及以上的卫星进行立体观测以确定目标位置,在星座卫星协同观测过程中存在立体观测等约束条件。同时,中低轨卫星视场有限,无法维持对空间移动目标的长期跟踪,需要通过多星协同的方式完成对目标的长时间跟踪。针对多星协同问题,有的方案采用集中式星座调度的方法,将卫星信息和目标信息传送至地面站进行处理。地面站接收到信息后首先对目标进行轨道预报,然后计算星座内卫星对目标的可观测窗口,最后根据场景约束求解调度方案并上注给星座卫星。由于集中式调度需要在地面汇总并处理信息,在计算完成后再重新发送给星座内所有卫星,信息传输过程需要大量通讯资源且存在大量时延,调度过程的时效性差,跟踪任务的成功率低。
技术实现要素:
3.对于上述现有技术的不足,本发明的目的在于提供一种卫星星座在轨分布式调度框架与调度方法,以解决现有调度方法中存在的通讯资源需求大、时效性差的问题。
4.为达到上述目的,本发明采用的技术方案如下:本发明提供一种卫星星座在轨分布式协同调度方法,包括以下步骤:s1:根据目标特性确定卫星星座构型及参数;s2:根据场景特点确定星座卫星协同观测过程相关约束;s3:确定卫星星座协同调度过程;s4:根据星座卫星协同调度过程特点,归纳星座调度过程中需要进行星间通讯的情况;s5:根据卫星星座在轨协同调度过程设计适应于在轨分布式场景的卫星星座在轨分布式协同调度框架;s6:根据设计的卫星星座在轨分布式协同调度框架进行星座调度。
5.作为优选的一种技术方案,所述步骤s3进一步包括:步骤s31:从外部环境获得初始目标信息;步骤s32:通过传感器获得星座对目标的观测量;步骤s33:通过星间通讯将所述初始目标信息与观测量进行信息融合,更新目标状态信息并对目标进行一定时间内的轨道预报;
步骤s34:星座内卫星根据自身状态、目标状态、卫星对目标的可观测窗口、卫星与协同卫星之间的可通讯窗口进行星间调度决策,以保持对目标的持续跟踪。
6.作为优选的一种技术方案,在所述步骤s4中:星座调度过程中需要进行星间通讯的情况归纳为新目标事件和观测卫星切换事件;其中观测卫星切换事件包括剩余观测窗口不足、星间剩余可通信窗口不足、目标位置估计误差达到误差门限、卫星处于单星跟踪状态中的一项或多项子事件,卫星触发任意子事件都需要进行观测卫星切换。
7.作为优选的一种技术方案,观测卫星切换设置有最小时间间隔。
8.作为优选的一种技术方案,所述步骤s5进一步包括:s51:外界环境将新目标信息传递给星座内可观测到目标的卫星;s52:触发新目标事件的卫星对事件信息进行处理后生成协同观测任务,并与其相邻卫星进行通讯,建立针对该目标的星间动态协商组;s53:将协同观测任务发布给星间动态协商组内其他卫星,其他卫星接收到协同观测任务后结合星上条件对任务进行评估并评分;s54:根据评分结果确定卫星是否可以执行协同观测任务。
9.作为优选的一种技术方案,在所述步骤s53中,其他卫星接收到协同观测任务后结合星上条件对任务进行评估并评分,进一步包括:卫星i对目标j在k时刻的评估值如式(4)所示(4)其中,,,,和分别表示卫星状态因子,星间通讯窗口因子,目标位置估计误差因子,剩余目标可观测窗口长度因子和卫星姿态机动时间因子。
10.作为优选的一种技术方案,所述步骤s54进一步包括:接收到协同观测任务的卫星对任务进行评分后,若评分为0说明卫星不具有执行该协同观测任务的条件,不对该任务进行响应;若评分大于0说明卫星可以执行该观测任务,卫星加入发布协同观测任务卫星建立的星间动态协商组,通过分布式拍卖算法进行星间分布式协商。
11.本发明相对于现有技术的有益效果是:本发明适用于空间目标的多星协同跟踪调度问题,通过在调度过程中引入分布式事件触发机制进行闭环控制,解决了集中式调度过程中存在的时效性差,场景适应性弱的问题,能够在局部信息的条件下实现星座卫星在轨分布式协商调度,调度所需星座信息少,对星间通讯条件要求低,调度方案可根据目标跟踪情况实时调整,从而使得卫星星座调度过程更加灵活高效。
附图说明
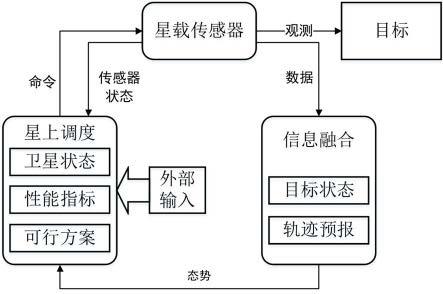
12.图1为卫星星座协同调度过程示意图;图2为卫星星座在轨分布式协同调度框架。
具体实施方式
13.为了便于本领域技术人员的理解,下面结合实施例与附图对本发明作进一步的说明,实施方式提及的内容并非对本发明的限定。
14.参照图1,本实施例提供一种卫星星座在轨分布式协同调度方法,包括以下步骤:s1、根据目标特性确定卫星星座构型及参数;具体的,根据观测任务需求和目标特点进行星座设计,确定星座构型参数。
15.在本实施例中,以对空间目标进行双星立体观测任务为例。任务场景中目标分布高度为200-2000km,大气临边高度为80km,星上载荷最大探测距离为6000km。考虑到目标可能出现在空域任意位置,选择均匀分布的walker构型作为执行任务的星座构型。执行双星立体观测任务过程中需要尽可能保证星座对目标点的二重覆盖,以空间的二重覆盖率为设计指标进行星座具体参数设计。经参数分析,确定轨道高度为1600km,轨道倾角为60
°
,4个轨道面,相位因子为1,由32颗星组成的walker-δ星座为任务执行星座,该星座可以对目标高度为200km的目标实现97%的二重覆盖,可以对高度大于400km的目标实现99.99%的二重覆盖。
16.s2、根据场景特点确定星座卫星协同观测过程相关约束。
17.s3、确定卫星星座协同调度过程,如图1所示。卫星星座的协同调度过程是由传感器观测,信息融合,星上调度三个环节构成的闭环调度过程。星座从外部环境获得初始目标信息,通过传感器获得星座对目标的观测量,通过星间通讯进行信息融合,更新目标状态信息并对目标进行一定时间内的轨道预报。星座内卫星根据自身状态,目标状态、卫星对目标的可观测窗口、卫星与协同卫星之间的可通讯窗口等信息进行星间调度决策,以保持对目标的持续跟踪。
18.在本实施例中,根据所述建立卫星对目标的观测模型,选择无迹卡尔曼滤波算法作为目标跟踪算法;具体的,将星座内卫星与目标的相对位置矢量从惯性系转换至轨道坐标系,如式(1):(1)其中,r
t
和rs分别表示航天器和目标在惯性系下的位置矢量,x
l
表示卫星与目标的相对位置矢量在轨道坐标系下的横坐标,y
l
表示卫星与目标的相对位置矢量在轨道坐标系下的纵坐标,z
l
表示卫星与目标的相对位置矢量在轨道坐标系下的竖坐标,t
ecl-lvlh
表示转换系数。
19.进一步地,卫星对目标的测量方程为:
ꢀꢀꢀꢀꢀ
(2)其中,α和β分别是方位角和高度角,δ
α
和δ
β
分别是方位角和高度角的测量噪声,。
20.进一步地,两颗卫星对目标进行立体协同观测的测量方程为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)其中,(α1,β1),( α2,β2)分别为两颗卫星对目标的观测量,x
l1
、x
l2
分别表示两颗卫星与目标的相对位置矢量在轨道坐标系下的横坐标,y
l1
、y
l2
分别表示两颗卫星与目标的相对位置矢量在轨道坐标系下的纵坐标,z
l1
、z
l2
分别表示两颗卫星与目标的相对位置矢量在轨道坐标系下的竖坐标。
21.s4、根据星座卫星协同调度过程特点,将星座调度过程中需要进行星间通讯的情况归纳为新目标事件和观测卫星切换事件。其中观测卫星切换事件包括剩余观测窗口不足、星间剩余可通信窗口不足、目标位置估计误差达到误差门限、卫星处于单星跟踪状态等四种子事件,卫星触发任意子事件都需要进行观测卫星切换。
22.s5、根据卫星星座在轨协同调度过程设计适应于在轨分布式场景的卫星星座在轨分布式协同调度框架;如图2所示。该框架以单颗卫星为研究对象,在s4的基础上将事件触发机制引入星座调度,确定了星座内单颗卫星与星座内其他卫星在协同调度过程中的信息交互机制,具体步骤如下:s51、外界环境将新目标信息传递给星座内可观测到目标的卫星,卫星星座调度过程开始。根据步骤s4,接收到新目标信息的卫星触发新目标事件。
23.s52、触发新目标事件的卫星对事件信息进行处理后生成协同观测任务,并与其相邻卫星进行通讯,建立针对该目标的星间动态协商组。
24.s53、将协同观测任务发布给协商组内其他卫星,其他卫星接收到协同观测任务后结合星上条件对任务进行评估并评分。卫星i对目标j在k时刻的评估值如式(2)所示。评估过程中主要考虑当前卫星与发布任务卫星之间的剩余可通信窗口,当前卫星与目标之间的估计剩余观测窗口,当前卫星传感器指向目标位置的传感器视场半径、目标的位置估计误差、卫星从当前姿态机动至指向目标姿态所需时间以及卫星当前状态。
25.(4)其中,,,,和分别表示卫星状态因子,星间通讯窗口因子,目标位置估计误差因子,剩余目标可观测窗口
长度因子和卫星姿态机动时间因子。s54、步骤s53中接收到协同观测任务的卫星对任务进行评分后,若评分为0说明卫星不具有执行该协同观测任务的条件,不对该任务进行响应。若评分大于0说明卫星可以执行该观测任务,卫星加入s53中发布协同观测任务卫星建立的协商组,通过分布式拍卖算法consensus-based bundle algorithm进行星间分布式协商。
26.s55、步骤s54协商组中卫星通过星间协商达成共识后,确定评分最高的卫星执行协同观测任务。两颗卫星建立星间链路,开始对目标进行协同立体观测。
27.应当说明的是,由于星座内卫星与目标均处于高速运动过程中且卫星视场有限,处于协同立体观测状态的卫星无法长时间保持对目标的观测,必须进行星间切换。根据步骤s4,需要进行星间切换的卫星将触发星间切换事件。其中,进行双星协同观测的卫星由两颗卫星中对目标剩余观测窗口最长的一颗卫星触发观测卫星切换事件。为避免卫星连续触发事件,设置触发事件最小时间间隔。
28.本实施例提供两种星座任务调度的调度方式:(1)针对出现新目标情况的星座任务调度;新目标信息由外界环境传给星座内能观测到目标的卫星,星座内卫星接收到目标信息后确定第二颗卫星与该卫星进行协同观测,如图2中的事件工作流1.1所示。
29.具体的,卫星接收到新目标信息后,在星上触发新目标事件,对事件信息进行处理后生成协同观测任务。然后,该卫星其相邻卫星进行通讯,建立针对该目标的星间动态协商组以确定与之进行协同观测的卫星,并向准备邀请进组卫星发送协同观测任务。进一步的,接收到协同观测任务的卫星将结合星上条件对任务进行评估并评分。
30.其中,处于空闲状态和双星协同观测状态的卫星可以接受协同观测任务,处于空闲状态的卫星优先级更高。在本实施例中,评分时的卫星状态因子设为1。而处于单星跟踪状态的卫星无法接受协同观测任务,设为0。处于双星观测状态卫星的卫星状态因子设为0-1之间的数值,可根据需求调整。
31.进一步的,接收到协同观测任务的卫星对任务进行评分后,若评分为0说明卫星不具有执行该协同观测任务的条件,不对该任务进行响应。若评分大于0说明卫星可以执行该观测任务,卫星加入发布协同观测任务卫星建立的协商组,通过分布式拍卖算法consensus-based bundle algorithm进行星间分布式协商。
32.进一步的,协商组中卫星通过星间协商达成共识后,确定评分最高的卫星执行协同观测任务。两颗卫星建立星间链路,开始对目标进行协同立体观测。
33.(2)针对目标跟踪过程中卫星切换的任务调度;星座内卫星无法维持对目标的持续跟踪时,会触发观测卫星切换事件。
34.具体的,在本实施例中,针对双星立体跟踪场景星间切换特点,将观测卫星切换事件进一步细分为剩余观测窗口不足、星间剩余可通信窗口不足、目标位置估计误差达到误差门限、卫星处于单星跟踪状态等四种子事件,卫星触发任意子事件都需要进行观测卫星切换。
35.事件触发条件表示为:
(5)其中,,,,分别对应剩余观测窗口不足、星间剩余可通信窗口不足、目标位置估计误差达到误差门限、卫星处于单星跟踪状态四个子事件。i(k)为避免事件连续触发造成通讯资源消耗的控制变量,表示为:(6)其中,是上一次触发观测卫星切换事件的时间,为两次触发之间的最小时间间隔。本实施例中设为10s。
36.卫星触发观测卫星切换事件后将对信息进行处理并生成协同观测任务,然后与相邻卫星进行通讯,建立针对该目标的星间动态协商组,并向准备邀请进组卫星发送协同观测任务。进一步的,接收到协同观测任务的卫星将结合星上条件对任务进行评估并评分。
37.其中,处于空闲状态和双星协同观测状态的卫星可以接受协同观测任务,处于空闲状态的卫星优先级更高。在本实施例中,评分时的卫星状态因子设为1。而处于单星跟踪状态的卫星无法接受协同观测任务,设为0。处于双星观测状态卫星的卫星状态因子设为0-1之间的数值,可根据需求调整。
38.进一步的,接收到协同观测任务的卫星对任务进行评分后,若评分为0说明卫星不具有执行该协同观测任务的条件,不对该任务进行响应。若评分大于0说明卫星可以执行该观测任务,卫星加入发布协同观测任务卫星建立的协商组,通过分布式拍卖算法consensus-based bundle algorithm进行星间分布式协商。
39.进一步的,协商组中卫星通过星间协商达成共识后,确定评分最高的卫星执行协同观测任务。若触发事件的卫星原本处于双星跟踪状态,则其将切换协同卫星为经协商确定的卫星并与之建立星间链路,开始对目标进行协同立体观测。若触发事件的卫星原本处于单星跟踪状态,则与经协商确定的卫星建立星间链路,开始对目标进行协同观测。
40.s6:跟踪过程中有其他新目标信息传至星座,可根据上述步骤进行卫星调度,直至完成所有目标跟踪任务。
41.在此需要说的是,由于使用无迹卡尔曼滤波方法(ukf)进行空间目标跟踪属于本领域的常规技术手段,例如公开号为cn115097438a,公开日为2022.09.23的中国发明专利公开了基于自适应无迹卡尔曼滤波的高精度空间目标跟踪方法,以及公开号为cn114879176a公开日为2022.08.09的中国发明专利公开了一种用于雷达跟踪目标改进的强跟踪ukf方法,其中就具体公开了如何使用无迹卡尔曼滤波算法进行目标跟踪,故在此不在赘述。
42.由以上实施例可知,本发明在星座调度过程中引入分布式事件触发机制进行闭环
控制,解决了集中式调度过程中存在的时效性差,场景适应性弱的问题,能够在局部信息的条件下实现星座卫星在轨分布式协商调度,调度所需星座信息少,对星间通讯条件要求低,调度方案可根据目标跟踪情况实时调整,从而使得卫星星座调度过程高效且可靠。
43.该调度方法将事件触发机制引入调度过程,使得调度过程能够转移至星上进行。星座内卫星可自主接收和处理来自其他卫星的信息,并将预测的目标信息传给下一颗卫星进行星间接力,形成了闭环调度并缩短了调度时延,提高了卫星星座对复杂场景的适应性。
44.另外,本发明实例还提供一种计算机可读存储介质,其中,该计算机可读存储介质可存储有程序,该程序执行时包括上述方法实施例中记载的任何卫星星座在轨分布式协同调度方法的部分或全部步骤。
45.另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
46.所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储器中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储器中,包括若干指令用以使得一台计算机设备(可为个人计算机、服务器或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储器包括:u盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。
47.本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储器中,存储器可以包括:闪存盘、只读存储器(英文:read-only memory,简称:rom)、随机存取器(英文: random access memory,简称:ram)、磁盘或光盘等。
48.本发明具体应用途径很多,以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进,改进也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。