1.本发明涉及倾转旋翼机技术领域,特别是涉及一种变转速传动机构及其倾转旋翼机的模式适应装置。
背景技术:
2.倾转旋翼机是一种将固定翼飞机与直升机融为一体的新型飞行器。既具有直升机的垂直起降和空中悬停的能力,又具有螺旋桨飞机的高速巡航飞行能力。但是受制于复杂的旋翼/螺旋桨以及传动系统。倾转旋翼机旋翼/螺旋桨转速固定,难以实现特定飞行模式下高效率工作以及更优性能的需求。
3.旋翼/螺旋桨在直升机模式下提供升力,在螺旋桨飞机模式下提供前进动力,两者在设计上存在矛盾。为了提高旋翼/螺旋桨系统在不同模式下的工作效率,目前有两类技术路线。第一是旋翼变直径技术,即直升机模式下旋翼半径较大,以产生更大的拉力实现飞行;固定翼模式下缩短旋翼半径,减小旋翼桨尖速度和桨叶面积,此时的推进性能更优。第二是旋翼变转速技术,即直升机模式下旋翼转速较高,具备足够的升力实现垂直起飞;固定翼模式下降低旋翼转速,减小飞行过程中的阻力与消耗。通过这两种技术,旋翼/螺旋桨能够更加接近直升机/固定翼飞机的特点,从而在油耗、效率、航程、航时、航速等性能方面实现较大的提升。
4.旋翼变转速技术具有两种实现方式,第一种是改变发动机动力涡轮的转速,提高或降低发动机的出轴转速,从而改变传递到旋翼上的转速。第二种是改变发动机出轴至旋翼之间的传动比,达到改变旋翼转速的目的。改变发动机动力涡轮的转速依赖对发动机的控制,而改变传动比的方式可以通过机械传动中各机械结构的尺寸设计,实现传动比的精确改变。
5.现有技术中存在利用行星齿轮进行变速的机构,例如,公开号为cn1480668a的中国专利公开了一种行星齿轮,具有可围绕转动轴转动的行星齿轮架和设置在行星齿轮架上的至少一个行星轮,中心轮以及换齿轮。授权公告号为cn 101457814 b的中国专利公开了一种行星齿轮组,包括恒星齿轮;多个与该恒星齿轮外啮合的行星齿轮;以及相互连接该多个行星齿轮的行星架,多个行星齿轮绕该恒星齿轮的外周旋转,其中多个行星齿轮被布置为可旋转地非对称排列。上述两种方案的行星齿轮均只能实现一种传动比的转速输出,无法进行两种或多种传动比的输出,无法应用于倾转旋翼机对于旋翼/螺旋桨的控制。
技术实现要素:
6.本发明的目的是提供一种变转速传动机构及其倾转旋翼机的模式适应装置,以解决上述现有技术存在的问题,通过第一行星齿轮和第二太阳齿轮共同啮合第二行星齿轮的方式,在分别锁定行星架和第二太阳齿轮时,能够改变第二行星齿轮的转动状态,进而改变齿圈的转动状态,实现两种不同大小的传动比的输出,适用于倾转旋翼机对于不同转速的需求。
7.为实现上述目的,本发明提供了如下方案:
8.本发明提供一种变转速传动机构,包括同轴设置的第一太阳齿轮和第二太阳齿轮,所述第一太阳齿轮啮合有若干第一行星齿轮,所述第一行星齿轮和所述第二太阳齿轮共同啮合有第二行星齿轮,所述第二行星齿轮啮合有齿圈;还包括行星架,所述第一行星齿轮和所述第二行星齿轮分别转动连接在所述行星架上;所述第一太阳齿轮用于连接输入端,所述齿圈用于连接输出端;
9.锁定所述行星架时,所述第一太阳齿轮、所述第一行星齿轮、所述第二行星齿轮形成低速传动单元,此时,所述第二行星齿轮仅自转;
10.锁定所述第二太阳齿轮时,所述第一太阳齿轮、所述第一行星齿轮、所述第二行星齿轮、所述第二太阳齿轮形成高速传动单元,此时,所述第二行星齿轮自转的同时绕所述第二太阳齿轮公转。
11.优选地,所述第一行星齿轮沿周向均匀分布在所述第一太阳齿轮周围,所述第二行星齿轮与所述第一行星齿轮一一对应设置。
12.优选地,所述第二行星齿轮的厚度大于或等于所述第一行星齿轮和所述第二太阳齿轮的厚度之和。
13.优选地,所述第一行星齿轮通过第一安装轴转动连接在所述行星架上,所述第二行星齿轮通过第二安装轴转动连接在所述行星架上。
14.优选地,所述输入端为动力输入轴,所述动力输入轴与所述第一太阳齿轮通过轴键连接,所述动力输入轴与所述第二太阳齿轮通过第一轴承转动连接。
15.优选地,所述输出端为第一锥齿轮,所述第一锥齿轮与所述齿圈通过螺栓固定连接。
16.优选地,所述第一锥齿轮设置有中心孔,所述动力输入轴通过第二轴承转动设置在所述中心孔内。
17.优选地,所述中心孔远离所述动力输入轴的一侧设置有端盖。
18.优选地,所述行星架远离所述第一锥齿轮的一侧设置有套筒,所述套筒套设在所述动力输入轴上。
19.本发明还提供一种倾转旋翼机的模式适应装置,应用前文记载的所述的变转速传动机构,所述第一锥齿轮啮合有第二锥齿轮,所述第二锥齿轮用于连接旋翼。
20.本发明相对于现有技术取得了以下技术效果:
21.(1)本发明通过第一行星齿轮和第二太阳齿轮共同啮合第二行星齿轮的方式,在分别锁定行星架和第二太阳齿轮时,能够改变第二行星齿轮的转动状态,进而改变齿圈的转动状态,实现两种不同大小的传动比的输出,适用于倾转旋翼机对于不同转速的需求;
22.(2)本发明变转速传动机构采用行星齿轮机构,结构简单紧凑,载荷可以分配至多个第一行星齿轮或第二行星齿轮上,强度大,寿命长,并且,在依靠齿轮啮合的行星齿轮变速结构的基础上能够实现精确的转速控制,从而实现倾转旋翼机在不同模式下飞行性能的提升;
23.(3)本发明锁定行星架时,第二行星齿轮仅自转,锁定第二太阳齿轮时,第二行星齿轮自转的同时绕第二太阳齿轮公转,两种传动状态,即无论锁死行星架还是第二太阳齿轮,都不会改变齿圈的转动方向。
附图说明
24.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
25.图1为本发明变转速传动机构爆炸结构示意图;
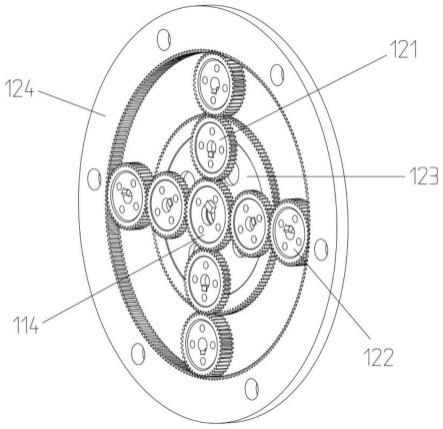
26.图2为图1中行星齿轮机构结构示意图;
27.图3为图1中转动输入部分结构示意图;
28.图4为本发明倾转旋翼机的模式适应装置结构示意图;
29.其中,1、变转速传动机构;11、转动输入部分;111、动力输入轴;112、套筒;113、行星架;114、第一太阳齿轮;115、轴键;12、行星齿轮机构;121、第一行星齿轮;1211、第一安装轴;122、第二行星齿轮;1221、第二安装轴;123、第二太阳齿轮;1231、第一轴承;124、齿圈;13、转动输出部分;131、第一锥齿轮;1311、第二轴承;132、端盖;133、螺栓;2、第二锥齿轮。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.本发明的目的是提供一种变转速传动机构及其倾转旋翼机的模式适应装置,以解决现有技术存在的问题,通过第一行星齿轮和第二太阳齿轮共同啮合第二行星齿轮的方式,在分别锁定行星架和第二太阳齿轮时,能够改变第二行星齿轮的转动状态,进而改变齿圈的转动状态,实现两种不同大小的传动比的输出,适用于倾转旋翼机对于不同转速的需求。
32.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
33.如图1~3所示,本发明提供一种变转速传动机构1,包括同轴设置的第一太阳齿轮114和第二太阳齿轮123,为实现不同的多级行星齿轮的啮合,第一太阳齿轮114的直径小于第二太阳齿轮123的直径。第一太阳齿轮114啮合有若干第一行星齿轮121,第一行星齿轮121啮合有第二行星齿轮122,第二行星齿轮122啮合有齿圈124,为保证第一行星齿轮121和第二行星齿轮122的相对啮合关系,第一行星齿轮121和第二行星齿轮122均转动连接在行星架113上。第二太阳齿轮123同样啮合第二行星齿轮122,也就是说,第一行星齿轮121和第二太阳齿轮123共同啮合有第二行星齿轮122。如此,组成了行星齿轮机构12,并满足,第一太阳齿轮114与第一行星齿轮121在各自分度圆相切处的线速度相同,第一行星齿轮121与第二行星齿轮122在各自分度圆相切处的线速度相同,第二行星齿轮122与第二太阳齿轮123在各自分度圆相切处的线速度相同,第二行星齿轮122与齿圈124在各自分度圆相切处的线速度相同。第一太阳齿轮114用于连接输入端,通过输入端将转动传递给第一太阳齿轮114,第一太阳齿轮114作为行星齿轮机构12的转动动力来源,能够通过第一行星齿轮121、第二行星齿轮122、第二太阳齿轮123之间的配合和传递将转动动力传递到齿圈124,齿圈
124用于连接输出端,将转速输出。变转速传动机构1主要有两种传动形式,即锁定行星架113时的低速传动和锁定第二太阳齿轮123时的高速传动。
34.具体的,当锁定行星架113时,第一太阳齿轮114、第一行星齿轮121、第二行星齿轮122形成低速传动单元,此时,由于行星架113被锁定,第一行星齿轮121和第二行星齿轮122只能在行星架113上自转,并通过自转的第二行星齿轮122将转动传递到齿圈124。锁定第二太阳齿轮123时,第一太阳齿轮114、第一行星齿轮121、第二行星齿轮122、第二太阳齿轮123形成高速传动单元,此时,由于第二太阳齿轮123被锁定,第二行星齿轮122能够绕第二太阳齿轮123公转,并通过自转加公转的第二行星齿轮122将转动传递到齿圈124。本发明通过第一行星齿轮121和第二太阳齿轮123共同啮合第二行星齿轮122的方式,在分别锁定行星架113和第二太阳齿轮123时,能够改变第二行星齿轮122的转动状态,进而改变齿圈124的转动状态,实现两种不同大小的传动比的输出,适用于倾转旋翼机对于不同转速的需求。需要说明的是,两种传动状态,即无论锁死行星架113还是第二太阳齿轮123,都不会改变齿圈124的转动方向。
35.第一行星齿轮121可以设置有多个,且多个第一行星齿轮121沿周向均匀分布在第一太阳齿轮114周围,第二行星齿轮122与第一行星齿轮121一一对应设置。通过采用行星齿轮机构12的形式,结构简单紧凑,载荷可以分配至多个第一行星齿轮121或第二行星齿轮122上,强度大,寿命长,并且,在依靠齿轮啮合的行星齿轮变速结构的基础上能够实现精确的转速控制,从而实现倾转旋翼机在不同模式下飞行性能的提升。
36.为了保证第二行星齿轮122既能够与第一行星齿轮121啮合又能够与第二太阳齿轮123啮合,第二行星齿轮122的厚度可以设置成大于或等于第一行星齿轮121和第二太阳齿轮123的厚度之和,在第一行星齿轮121和第二太阳齿轮123之间留有间隙,避免转动干涉影响。
37.在安装第一行星齿轮121和第二行星齿轮122时,可以通过安装轴进行安装,在行星架113上设置有相应的安装孔,第一行星齿轮121通过第一安装轴1211转动连接在行星架113上,第二行星齿轮122通过第二安装轴1221转动连接在行星架113上。
38.输入端可以为动力输入轴111,结合图3所示,动力输入轴111与第一太阳齿轮114通过轴键115连接,以将动力输入轴111的转动传递到第一太阳齿轮114。动力输入轴111与第二太阳齿轮123通过第一轴承1231转动连接,从而,第一轴承1231形成对于第二太阳齿轮123的转动支撑,在动力输入轴111和第一太阳齿轮114传递转动时,并不会影响第二太阳齿轮123的转动,同理,第二太阳齿轮123在转动时也不会造成对动力输入轴111的影响。
39.输出端可以为第一锥齿轮131,第一锥齿轮131与齿圈124通过螺栓133固定连接,以能够将齿圈124的转动顺利传递到第一锥齿轮131。
40.第一锥齿轮131设置有中心孔,动力输入轴111通过第二轴承1311转动设置在中心孔内,从而,第二轴承1311形成对于第一锥齿轮131的转动支撑,且第一锥齿轮131与动力输入轴111的转动互不干涉、互不影响。
41.中心孔远离动力输入轴111的一侧设置有端盖132,端盖132形成对于第一锥齿轮131的端部密封,形成第二轴承1311的密封润滑环境,避免粉尘对于第二轴承1311的影响。
42.行星架113远离第一锥齿轮131的一侧设置有套筒112,套筒112套设在动力输入轴111上,利用套筒112可以形成对于行星架113的轴向限位。
43.综上所述,本发明的变转速传动机构1主要包括三个部分,即转动输入部分11、行星齿轮机构12和转动输出部分13。转动输入部分11包括发动机向旋翼部分的传动轴,可由中置的涡轴发动机经蜗轮蜗杆机构换向后实现。行星齿轮机构12能够实现不同的传动比,满足倾转旋翼机在不同飞行模式下的需要。转动输出部分13为行星齿轮机构12将转速传递给第一锥齿轮131的部分。
44.如图4所示,本发明还提供一种倾转旋翼机的模式适应装置,可以应用前文记载的变转速传动机构1,第一锥齿轮131啮合有第二锥齿轮2,实现旋转方向的改变,第二锥齿轮2可以用于连接倾转旋翼机的旋翼。现有技术中通过对发动机输出轴转速的精确控制,以实现固定传动系统下的旋翼转速的改变。然而,发动机一般在某一转速范围内耗油率最低,且该转速范围相对较小,通过调整发动机的输出轴转速实现改变旋翼转速的方式燃油经济性较低,转换能力有限。采用机械结构改变传动比,可以使发动机的输出轴速度维持在耗油率较低的范围内,并允许在此基础上再结合发动机输出轴转速的改变进行旋翼转速的微小浮动,可以获取不同模式下不同飞行状态的最优转速。
45.本发明的工作原理如下:
46.为了实现不同模式下的旋翼转速变动,需要锁死不同的部件进行不同传动比的实现。假设第一太阳齿轮114的半径为r1,转速为ω,第一行星齿轮121的半径为r2,第二行星齿轮122的半径为r3,则第二太阳齿轮123的半径为(r1 2r2),齿圈124的半径为(r1 2r2 2r3)。
47.首先,锁死行星架113。此时,行星架113固定,第一行星齿轮121和第二行星齿轮122仅能分别绕行星架113上的第一安装轴1211和第二安装轴1221转动。动力输入轴111的动力输入可以通过第一太阳齿轮114、第一行星齿轮121和第二行星齿轮122传递至齿圈124上。则齿圈124的输出转速为:
[0048][0049]
其次,锁死第二太阳齿轮123。此时,行星架113绕动力输入轴111转动,第一行星齿轮121和第二行星齿轮122不仅能绕行星架113上的第一安装轴1211和第二安装轴1221转动,第二行星齿轮122还能绕第二太阳齿轮123公转,从而能够加速带动最外侧齿圈124转动。则齿圈124的输出转速为:
[0050][0051]
显然,锁死第二太阳齿轮123的方式下,齿圈124的输出转速更高。因此,直升机模式下,锁死齿圈124,能够获得更高的旋翼转速;固定翼模式下,锁死行星架113,能够实现旋翼转速降低。
[0052]
本发明中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。