一种面向预警机pd雷达的低可探测突防方法
技术领域
1.本发明属于飞行器突防技术领域,具体涉及一种面向预警机pd雷达的低可探测突防方法。
背景技术:
2.预警机在在战场中充当了空中远程哨岗和指挥官的作用,能够及早发现地面或海面目标,并指引己方飞机执行作战拦截,对有人/无人飞行器的战场生存产生很大威胁。预警机通常以“俯视”方式观测低空和海面目标,预警机装备的脉冲多普勒(简称“pd雷达”)具备同时测量和处理距离和速度信息的功能,充分利用其联合处理多维信息的能力,可实现从强背景杂波中检测和识别动目标。中国发明专利《一种隐形飞机的航迹规划方法》、《一种基于雷达探测概率云图的隐身飞机航迹规划方法》等提出隐身飞机对抗雷达探测的航迹规划方法,充分利用隐身飞机自身在部分角域的低rcs特征,通过战术规避实现规避探测的目的。但在面对预警探测威胁时,单纯依靠传统的战术规避来减弱自身暴露征候的方法已不太适用。必须根据预警机探测和识别运动目标的机理,制定新的突防策略。
技术实现要素:
3.(一)要解决的技术问题
4.本发明要解决的技术问题是如何提供一种面向预警机pd雷达的低可探测突防方法,以解决在面对预警探测威胁时,单纯依靠传统的战术规避来减弱自身暴露征候的方法已不太适用的问题。
5.(二)技术方案
6.为了解决上述技术问题,本发明提出一种面向预警机pd雷达的低可探测突防方法,该方法包括:构建包括预警机、目标及飞行背景的复合场景运动模型,根据预警机与目标的空间关系、目标rcs及雷达探测距离方程,制定不同阶段目标对抗雷达探测威胁的突防策略:
7.第一阶段,目标沿目标飞行基线方向飞行,以最快速度抵近飞行目的地;
8.第二阶段,目标实时调整航迹,使在雷达照射目标的时刻,二者相对径向速度为零或小于某阈值;
9.第三阶段,目标沿目标飞行基线方向飞行,以最快速度抵近飞行目的地。
10.(三)有益效果
11.本发明提出一种面向预警机pd雷达的低可探测突防方法,本发明的有益效果体现在两个方面:
12.(1)本方法将目标散射特征和运动特性相结合,解决传统战术规避不适用于对抗预警机pd雷达探测的问题。
13.(2)本方法根据实际攻防对抗场景,构建了预警机运动模型,根据预警机与目标之间实时动态变化情况,进行目标飞行状态的在线规划,具有更贴近于实际应用场景的特点。
附图说明
14.图1为本发明复合场景模型构建示意图;
15.图2为本发明第一阶段目标航迹示意图;
16.图3为本发明第二阶段目标航迹示意图;
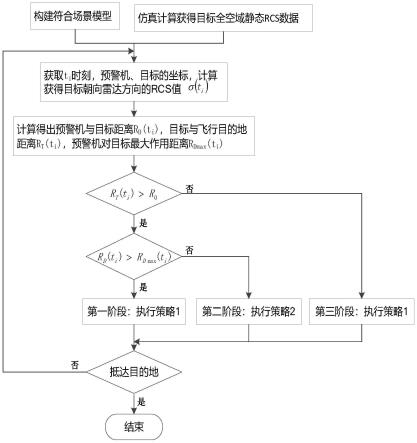
17.图4为本发明低可探测突防策略工作流程。
具体实施方式
18.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
19.本发明提供一种面向预警机pd雷达的低可探测突防方法,在面对预警机探测威胁时,根据雷达与目标空间位置关系,目标突防策略进行实时调整,以规避预警机的探测和识别,提升目标在典型任务环境下的突防能力。
20.本发明提供一种面向预警机pd雷达的低可探测突防方法,构建包括预警机、目标及飞行背景的复合场景运动模型,根据预警机与目标的空间关系、目标rcs及雷达探测距离方程,制定不同阶段目标对抗雷达探测威胁的突防策略:第一阶段,目标沿目标飞行基线方向飞行,使其以最快速度抵近飞行目的地;第二阶段,目标实时调整航迹,使在雷达照射目标的时刻,二者相对径向速度为零或小于某阈值(pd雷达最小可检测速度);第三阶段,目标沿目标飞行基线方向飞行,使其以最快速度抵近飞行目的地。
21.本发明提供一种面向预警机pd雷达的低可探测突防方法,包括:
22.为便于描述,首先构建包含预警机、目标及飞行背景的复合场景运动模型。目标的飞行背景包括但不限于海面,也可以是典型陆地、天空等背景。以典型海面背景为例,以目标要到达的飞行目的地所在位置为坐标原点构建全局坐标系,如图1所示。
23.不失一般性地,假设预警机和目标飞行高度均不变,且均以固定速度巡航,它们的速度分别记为vr(t)和v
t
(t)。定义目标与飞行目的地的连线在水平面内的投影为目标飞行基线。
24.将目标看作单个质点,初始时刻t0时,目标在全局坐标下的坐标为(x
t
(t0),y
t
(t0),z
t
(t0))。预警机pd雷达相邻扫描周期内,目标相对于雷达位置关系变化可忽略。
25.以预警机pd雷达扫描一周的时间δt,将观测时间t离散成n个离散射时间点,记为ti,i=1,2,
…
,n。假设在观测时刻ti,i=1,2,
…
,n,雷达刚好照射到目标,则该时刻目标在全局坐标系下的坐标为
[0026][0027]
式中,x
t
(t
i-1
)、y
t
(t
i-1
)、z
t
(t
i-1
)为雷达上一时刻照射目标时,目标所在的位置,v
t,x
(t
i-1
)、v
t,y
(t
i-1
)分别为对应时刻沿x和y方向的速度分量。
[0028]
任意观测时刻ti,i=1,2,
…
,n,目标距离目标飞行目的地距离表示为
[0029][0030]
同理可以获得任意观测ti时刻雷达在全局坐标系下的坐标(xr(ti),yr(ti),zr(ti)),综合考虑目标绕本体坐标系3自由度的旋转运动导致的目标姿态变化,根据坐标转换原理,雷达在目标本体坐标系下的位置可以表示为
[0031][0032]
式中,λ(ti)为目标3自由度的转动引起的旋转矩阵,其为目标方位角、俯仰角、横滚角的函数。
[0033]
在任意观测ti时刻,由雷达在目标本体坐标系下的位置,雷达视线相对于目标的俯仰角和方位角可表示为
[0034][0035][0036]
式中,rd(ti)为雷达与目标的径向距离,其可表示为
[0037][0038]
其次,通过仿真计算获得目标全空域静态rcs数据,然后根据雷达视线相对于目标的俯仰和方位角,得到任意观测ti,i=1,2,
…
,n时刻,目标朝向雷达方向的rcs值σ(ti)。
[0039]
然后,根据雷达方程构建任意观测ti,i=1,2,
…
,n时刻的雷达探测距离方程
[0040][0041]
式中,r
d max
(ti)为ti时刻雷达探测距离,σ(ti)为ti时刻目标朝向雷达方向的rcs,p
t
为雷达发射功率,g
t
为雷达发射天线增益,gr为雷达接收天线增益,λ为雷达波长,s
imin
为雷达接收机灵敏度,l为雷达系统损耗。
[0042]
根据目标飞行过程中面临预警机探测威胁的程度,分阶段制定目标低可探测突防策略:
[0043]
第一阶段:如果满足条件:rd(ti)>r
dmax
(ti),r
t
(ti)>r0,r0为目标强行突防的最大允许距离,即目标处于雷达探测威力范围以外,且不满足强行突防条件。目标飞行执行突防策略1:目标沿目标飞行基线方向飞行,使其以最快速度抵近飞行目的地。
[0044]
根据式(1),在第t
i 1
,i=1,
…
,n时刻,目标在全局坐标系下的位置可表示为
[0045][0046]
其中,目标各个方向的速度为
[0047]
[0048][0049]vt,z
(ti)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0050]
其中,v
t
为目标的速度;
[0051]
该阶段目标飞行航迹示意如图2所示。
[0052]
第二阶段:如果满足条件:rd(ti)≤r
dmax
(ti),r
t
(ti)>r0,r0为目标强行突防的最大允许距离,即目标已进入雷达的探测威力范围内,但不满足强行突防条件。目标飞行执行突防策略2:根据目标与雷达随时间变化的空间关系,实时调整目标飞行速度,使在雷达照射目标的时刻,二者相对径向速度为零或小于某阈值(pd雷达最小可检测速度)。此时,目标雷达回波多普勒频率落入pd雷达杂波区内。具体实现方式如下。
[0053]
任意ti,i=1,
…
,n时刻,雷达与飞行器的径向距离的单位矢量为
[0054][0055]
式中,i
x
、iy、iz分别为全局坐标系x、y和z轴方向的单位矢量。
[0056]
目标运动速度为v
t
(ti)=[v
t,x
(ti)
·ix
,v
t,y
(ti)
·iy
,0]
t
,当满足条件
[0057]vt
(ti)
t
·
id(ti)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0058]
即
[0059][0060]
此时,飞行器速度沿pd雷达径向方向分量为0,目标回波与pd雷达主瓣杂波在多普勒域无法分辨,增加pd雷达探测和识别目标的难度。
[0061]
目标以固定速度v
t
巡航,其满足
[0062][0063]
联立式(14)和(15),可求解分别获得两组v
t,x
(ti)、v
t,y
(ti)的解。
[0064]
任意时刻,以目标抵近飞行目的地为约束,要求目标速度与目标飞行基线夹角越小越好,且应不超过90
°
,此时满足如下关系
[0065][0066]
至此,可获得v
t,x
(ti)、v
t,y
(ti)的唯一解。
[0067]
可选地,当更为先进的pd雷达利用距离和多普勒二维联合处理目标探测识别问题时,还应使目标回波与雷达主瓣杂波位于同一距离单元内。即目标飞行高度应满足
[0068]
[0069]
式中,δr为pd雷达的径向分辨率,即最小距离单元,δr=cτ/2,c为光速,τ为脉宽。
[0070]
根据式(17)和式(16)可获得第t
i 1
时刻,目标在全局坐标系下的坐标。
[0071]
该阶段目标飞行航迹示意如图3所示。
[0072]
第三阶段:如果满足条件:r
t
(ti)≤r0,r0为目标强行突防的最大允许距离,目标距离飞行目的地已经很近,则目标飞行执行突防策略1:目标沿目标飞行基线方向飞行,使其以最快速度抵近飞行目的地。在此过程中,即便pd雷达发现目标,但其在短时间内,无法采取有效措施实施拦截。
[0073]
根据式(8)、(9)、(10)、(11),可获得第t
i 1
时刻,目标在全局坐标系下的位置,直至目标抵达飞行目标点。
[0074]
本发明提出的面向预警机pd雷达的低可探测突防方法工作流程如图4所示。
[0075]
实施例1:
[0076]
一种面向预警机pd雷达的低可探测突防方法,包括以下步骤:
[0077]
首先构建包含预警机、目标及飞行背景的复合场景运动模型。目标的飞行背景包括但不限于海面,也可以是典型陆地、天空等背景。以典型海面背景为例,以目标要到达的飞行目的地所在位置为坐标原点构建全局坐标系,如图1所示。
[0078]
不失一般性地,假设预警机和目标飞行高度均不变,且均以固定速度巡航,它们的速度分别记为vr(t)和v
t
(t)。定义目标与飞行目的地的连线在水平面内的投影为目标飞行基线。
[0079]
将目标看作单个质点,初始时刻t0时,目标在全局坐标下的坐标为(x
t
(t0),y
t
(t0),z
t
(t0))。预警机pd雷达相邻扫描周期内,目标相对于雷达位置关系变化可忽略。
[0080]
以预警机pd雷达扫描一周的时间δt,将观测时间t离散成n个离散射时间点,记为ti(i=1,2,
…
,n)。假设在观测时刻ti(i=1,2,
…
,n),雷达刚好照射到目标,则该时刻目标在全局坐标系下的坐标为
[0081][0082]
式中,x
t
(t
i-1
)、y
t
(t
i-1
)、z
t
(t
i-1
)为雷达上一时刻照射目标时,目标所在的位置,v
t,x
(t
i-1
)、v
t,y
(t
i-1
)分别为对应时刻沿x和y方向的速度分量。
[0083]
任意观测时刻ti(i=1,2,
…
,n),目标距离目标飞行目的地距离可表示为
[0084][0085]
同理可以获得任意观测ti时刻雷达在全局坐标系下的坐标(xr(ti),yr(ti),zr(ti)),综合考虑目标绕本体坐标系3自由度的旋转运动导致的目标姿态变化,根据坐标转换原理,雷达在目标本体坐标系下的位置可以表示为
[0086]
[0087]
式中,λ(ti)为目标3自由度的转动引起的旋转矩阵,其为目标方位角、俯仰角、横滚角的函数。
[0088]
在任意观测ti时刻,由雷达在目标本体坐标系下的位置,雷达视线相对于目标的俯仰角和方位角可表示为
[0089][0090][0091]
式中,rd(ti)为雷达与目标的径向距离,其可表示为
[0092][0093]
其次,通过仿真计算获得目标全空域静态rcs数据,然后根据雷达视线相对于目标的俯仰和方位角,得到任意观测ti(i=1,2,
…
,n)时刻,目标朝向雷达方向的rcs值σ(ti)。
[0094]
然后,根据雷达方程构建任意观测ti(i=1,2,
…
,n)时刻的雷达探测距离方程
[0095][0096]
式中,r
dmax
(ti)为ti时刻雷达探测距离,σ(ti)为ti时刻目标朝向雷达方向的rcs,p
t
为雷达发射功率,g
t
为雷达发射天线增益,gr为雷达接收天线增益,λ为雷达波长,s
imin
为雷达接收机灵敏度,l为雷达系统损耗。
[0097]
进一步地,根据目标飞行过程中面临预警机探测威胁的程度,分阶段制定目标低可探测突防策略:
[0098]
第一阶段:如果满足条件:rd(ti)>r
dmax
(ti),r
t
(ti)>r0(r0为目标强行突防的最大允许距离),即目标处于雷达探测威力范围以外,且不满足强行突防条件。目标飞行执行突防策略1:目标沿目标飞行基线方向飞行,使其以最快速度抵近飞行目的地。
[0099]
根据式(1),在第t
i 1
(i=1,
…
,n)时刻,目标在全局坐标系下的位置可表示为
[0100][0101]
其中,目标的速度为
[0102][0103][0104]vt,z
(ti)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0105]
该阶段目标飞行航迹示意如图2所示。
[0106]
第二阶段:如果满足条件:rd(ti)≤r
dmax
(ti),r
t
(ti)>r0(r0为目标强行突防的最大允许距离),即目标已进入雷达的探测威力范围内,但不满足强行突防条件。目标飞行执行突防策略2:根据目标与雷达随时间变化的空间关系,实时调整目标飞行速度,使在雷达照射目标的时刻,二者相对径向速度为零或小于某阈值(pd雷达最小可检测速度)。此时,目标雷达回波多普勒频率落入pd雷达杂波区内。具体实现方式如下。
[0107]
任意ti(i=1,
…
,n)时刻,雷达与飞行器的径向距离的单位矢量为
[0108][0109]
式中,i
x
、iy、iz分别为全局坐标系x、y和z轴方向的单位矢量。
[0110]
目标运动速度为v
t
(ti)=[v
t,x
(ti)
·ix
,v
t,y
(ti)
·iy
,0]
]t
,当满足条件
[0111]vt
(ti)
)t
·
id(ti)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)
[0112]
即
[0113][0114]
此时,飞行器速度沿pd雷达径向方向分量为0,目标回波与pd雷达主瓣杂波在多普勒域无法分辨,增加pd雷达探测和识别目标的难度。
[0115]
目标以固定速度v
t
巡航,其满足
[0116][0117]
联立式(14)和(15),可求解分别获得两组v
t,x
(ti)、v
t,y
(ti)的解。
[0118]
任意时刻,以目标抵近飞行目的地为约束,要求目标速度与目标飞行基线夹角越小越好,且应不超过90
°
,此时满足如下关系
[0119][0120]
至此,可获得v
t,x
(ti)、v
t,y
(ti)的唯一解。
[0121]
可选地,当更为先进的pd雷达利用距离和多普勒二维联合处理目标探测识别问题时,还应使目标回波与雷达主瓣杂波位于同一距离单元内。即目标飞行高度应满足
[0122][0123]
式中,δr为pd雷达的径向分辨率(即最小距离单元),δr=cτ/2(c为光速,τ为脉宽)。
[0124]
根据式(8)和式(17)可获得第t
i 1
时刻,目标在全局坐标系下的坐标。
[0125]
该阶段目标飞行航迹示意如图3所示。
[0126]
第三阶段:如果满足条件:r
t
(ti)≤r0(r0为目标强行突防的最大允许距离),目标距离飞行目的地已经很近,则目标飞行执行突防策略1:目标沿目标飞行基线方向飞行,使
其以最快速度抵近飞行目的地。在此过程中,即便pd雷达发现目标,但其在短时间内,无法采取有效措施实施拦截。
[0127]
根据式(8)、(9)、(10)、(11),可获得第t
i 1
时刻,目标在全局坐标系下的位置,直至目标抵达飞行目标点。
[0128]
本发明提出的面向预警机pd雷达的低可探测突防方法工作流程如图4所示。
[0129]
进一步地,目标的飞行背景包括但不限于海面,也可以是典型陆地、天空等背景。
[0130]
本发明的有益效果体现在两个方面:
[0131]
(1)本方法将目标散射特征和运动特性相结合,解决传统战术规避不适用于对抗预警机pd雷达探测的问题。
[0132]
(2)本方法根据实际攻防对抗场景,构建了预警机运动模型,根据预警机与目标之间实时动态变化情况,进行目标飞行状态的在线规划,具有更贴近于实际应用场景的特点。
[0133]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。