技术特征:
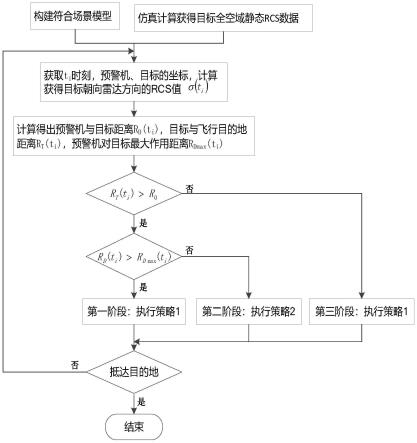
1.一种面向预警机pd雷达的低可探测突防方法,其特征在于,该方法包括:构建包括预警机、目标及飞行背景的复合场景运动模型,根据预警机与目标的空间关系、目标rcs及雷达探测距离方程,制定不同阶段目标对抗雷达探测威胁的突防策略:第一阶段,目标沿目标飞行基线方向飞行,以最快速度抵近飞行目的地;第二阶段,目标实时调整航迹,使在雷达照射目标的时刻,二者相对径向速度为零或小于某阈值;第三阶段,目标沿目标飞行基线方向飞行,以最快速度抵近飞行目的地。2.如权利要求1所述的面向预警机pd雷达的低可探测突防方法,其特征在于,所述构建包括预警机、目标及飞行背景的复合场景运动模型具体包括:以目标要到达的飞行目的地所在位置为坐标原点构建全局坐标系;假设预警机和目标飞行高度均不变,且均以固定速度巡航,速度分别记为v
r
(t)和v
t
(t);定义目标与飞行目的地的连线在水平面内的投影为目标飞行基线;将目标看作单个质点,初始时刻t0时,目标在全局坐标下的坐标为(x
t
(t0),y
t
(t0),z
t
(t0));预警机pd雷达相邻扫描周期内,目标相对于雷达位置关系变化忽略;以预警机pd雷达扫描一周的时间δt,将观测时间t离散成n个离散射时间点,记为t
i
,i=1,2,
…
,n;假设在观测时刻t
i
,i=1,2,
…
,n,雷达刚好照射到目标,则该时刻目标在全局坐标系下的坐标为式中,x
t
(t
i-1
)、y
t
(t
i-1
)、z
t
(t
i-1
)为雷达上一时刻照射目标时,目标所在的位置,v
t,x
(t
i-1
)、v
t,y
(t
i-1
)分别为对应时刻沿x和y方向的速度分量;任意观测时刻t
i
,i=1,2,
…
,n,目标距离目标飞行目的地距离表示为同理可以获得任意观测t
i
时刻雷达在全局坐标系下的坐标(x
r
(t
i
),y
r
)t
i
),z
r
(t
i
)),综合考虑目标绕本体坐标系3自由度的旋转运动导致的目标姿态变化,根据坐标转换原理,雷达在目标本体坐标系下的位置可以表示为式中,λ(t
i
)为目标3自由度的转动引起的旋转矩阵,为目标方位角、俯仰角、横滚角的函数。3.如权利要求2所述的面向预警机pd雷达的低可探测突防方法,其特征在于,飞行背景为海面、陆地或天空。4.如权利要求2所述的面向预警机pd雷达的低可探测突防方法,其特征在于,预警机与目标的空间关系、目标rcs及雷达探测距离方程为:在任意观测t
i
时刻,由雷达在目标本体坐标系下的位置,雷达视线相对于目标的俯仰角和方位角表示为
式中,r
d
(t
i
)为雷达与目标的径向距离,表示为通过仿真计算获得目标全空域静态rcs数据,然后根据雷达视线相对于目标的俯仰和方位角,得到任意观测t
i
,i=1,2,
…
,n时刻,目标朝向雷达方向的rcs值σ(t
i
);根据雷达方程构建任意观测t
i
,i=1,2,
…
,n时刻的雷达探测距离方程为:式中,r
dmax
(t
i
)为t
i
时刻雷达探测距离,σ(t
i
)为t
i
时刻目标朝向雷达方向的rcs,p
t
为雷达发射功率,g
t
为雷达发射天线增益,g
r
为雷达接收天线增益,λ为雷达波长,s
imin
为雷达接收机灵敏度,l为雷达系统损耗。5.如权利要求4所述的面向预警机pd雷达的低可探测突防方法,其特征在于,所述第一阶段目标对抗雷达探测威胁的突防策略为:如果满足条件:r
d
(t
i
)>r
dmax
(t
i
),r
t
(t
i
)>r0,r0为目标强行突防的最大允许距离,即目标处于雷达探测威力范围以外,且不满足强行突防条件;目标飞行执行突防策略1:目标沿目标飞行基线方向飞行,以最快速度抵近飞行目的地;根据式(1),在第t
i 1
,i=1,
…
,n时刻,目标在全局坐标系下的位置表示为其中,目标各个方向的速度为其中,目标各个方向的速度为v
t,z
(t
i
)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)其中,v
t
为目标的速度。6.如权利要求4所述的面向预警机pd雷达的低可探测突防方法,其特征在于,所述第二阶段目标对抗雷达探测威胁的突防策略为:如果满足条件:r
d
(t
i
)≤r
dmax
(t
i
),r
t
(t
i
)>r0,r0为目标强行突防的最大允许距离,即目标已进入雷达的探测威力范围内,但不满足强行突防条件;目标飞行执行突防策略2:根据目标与雷达随时间变化的空间关系,实时调整目标飞行速度,使在雷达照射目标的时刻,二
者相对径向速度为零或小于某阈值;此时,目标雷达回波多普勒频率落入pd雷达杂波区内;具体实现方式如下:任意t
i
,i=1,
…
,n时刻,雷达与飞行器的径向距离的单位矢量为式中,i
x
、i
y
、i
z
分别为全局坐标系x、y和z轴方向的单位矢量;目标运动速度为v
t
(t
i
)=[v
t,x
(t
i
)
·
i
x
,v
t,y
(t
i
)
·
i
y
,0]
]t
,当满足条件v
t
(t
i
)
t
·
i
d
(t
i
)=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(13)即此时,飞行器速度沿pd雷达径向方向分量为0,目标回波与pd雷达主瓣杂波在多普勒域无法分辨,增加pd雷达探测和识别目标的难度;目标以固定速度v
t
巡航,满足联立式(14)和(15),求解分别获得两组v
t,x
(t
i
)、v
t,y
(t
i
)的解;任意时刻,以目标抵近飞行目的地为约束,要求目标速度与目标飞行基线夹角越小越好,且应不超过90
°
,此时满足如下关系至此,获得v
t,x
(t
i
)、v
t,y
(t
i
)的唯一解。7.如权利要求6所述的面向预警机pd雷达的低可探测突防方法,其特征在于,所述阈值为pd雷达最小可检测速度。8.如权利要求6所述的面向预警机pd雷达的低可探测突防方法,其特征在于,当pd雷达利用距离和多普勒二维联合处理目标探测识别时,还应使目标回波与雷达主瓣杂波位于同一距离单元内。9.如权利要求8所述的面向预警机pd雷达的低可探测突防方法,其特征在于,当pd雷达利用距离和多普勒二维联合处理目标探测识别时,目标飞行高度应满足式中,δr为pd雷达的径向分辨率,即最小距离单元,δr=cτ/2,c为光速,τ为脉宽;根据式(17)和式(16)获得第t
i 1
时刻,目标在全局坐标系下的坐标。10.如权利要求5所述的面向预警机pd雷达的低可探测突防方法,其特征在于,所述第
三阶段目标对抗雷达探测威胁的突防策略为:如果满足条件:r
t
(t
i
)≤r0,r0为目标强行突防的最大允许距离,目标距离飞行目的地已经很近,则目标飞行执行突防策略1:目标沿目标飞行基线方向飞行,以最快速度抵近飞行目的地;根据式(8)、(9)、(10)、(11),获得第t
i 1
时刻,目标在全局坐标系下的位置,直至目标抵达飞行目标点。
技术总结
本发明涉及一种面向预警机PD雷达的低可探测突防方法,属于飞行器突防技术领域。本发明构建包含预警机、目标及飞行背景的复合场景运动模型,根据预警机与目标的空间关系、目标RCS及雷达探测距离方程,制定不同阶段目标对抗雷达探测威胁的突防策略:第一阶段,目标沿目标飞行基线方向飞行,使其以最快速度抵近飞行目的地;第二阶段,目标实时调整航迹,使在雷达照射目标的时刻,二者相对径向速度为零或小于某阈值(PD雷达最小可检测速度);第三阶段,目标沿目标飞行基线方向飞行,使其以最快速度抵近飞行目的地。本方法将目标散射特征和运动特性相结合,解决传统战术规避不适用于对抗预警机PD雷达探测的问题,具有更贴近于实际应用场景的特点。场景的特点。场景的特点。
技术研发人员:唐建国 郝璐 郑理 武振波 王瑞
受保护的技术使用者:北京机电工程研究所
技术研发日:2022.10.24
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。