技术特征:
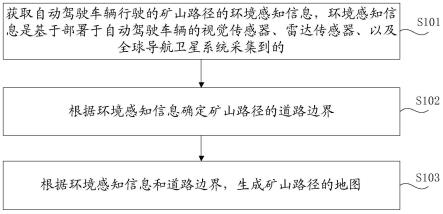
1.一种地图生成方法,包括:获取自动驾驶车辆行驶的矿山路径的环境感知信息,其中,所述环境感知信息是基于部署于所述自动驾驶车辆的视觉传感器、雷达传感器、以及全球导航卫星系统采集到的;根据所述环境感知信息确定所述矿山路径的道路边界;根据所述环境感知信息和所述道路边界,生成所述矿山路径的地图。2.根据权利要求1所述的方法,其中,所述根据所述环境感知信息确定所述矿山路径的道路边界,包括:根据所述环境感知信息确定所述矿山路径的矿山墙根坐标;根据所述环境感知信息,将所述矿山墙根坐标向所述矿山路径的中心位置做偏移处理,得到所述道路边界。3.根据权利要求2所述的方法,其中,所述根据所述环境感知信息,将所述矿山墙根坐标向所述矿山路径的中心位置做偏移处理,得到所述道路边界,包括:根据所述环境感知信息,确定所述矿山墙根坐标往所述矿山路径的中心位置的移动方向;根据所述移动方向将所述矿山墙根坐标偏移预设距离,得到边界坐标,所述道路边界包括所述边界坐标。4.根据权利要求1-3中任一项所述的方法,若所述矿山路径为矿山作业的路径中的部分路径;在所述根据所述环境感知信息和所述道路边界,生成所述矿山路径的地图之后,所述方法还包括:根据所述矿山路径的地图,对获取到的所述矿山作业的路径对应的全局地图进行更新处理,得到更新后的地图。5.根据权利要求4所述的方法,其中,所述根据所述矿山路径的地图,对获取到的所述矿山作业的路径对应的全局地图进行更新处理,得到更新后的地图,包括:确定所述矿山路径的地图的起始位置信息和终点位置信息;根据所述起始位置信息和所述终点位置信息,确定所述全局地图中的待更新区域;将所述待更新区域替换为所述矿山路径的地图,得到所述更新后的地图。6.根据权利要求1-5中任一项所述的方法,其中,所述获取自动驾驶车辆行驶的矿山路径的环境感知信息,包括:获取基于所述视觉传感器采集到的第一感知信息、基于所述雷达传感器采集到的第二感知信息、以及基于所述全球导航卫星系统采集到的第三感知信息;根据所述第一感知信息、所述第二感知信息、以及所述第三感知信息,生成所述环境感知信息。7.根据权利要求6所述的方法,其中,所述根据所述第一感知信息、所述第二感知信息、以及所述第三感知信息,生成所述环境感知信息,包括:确定所述第一感知信息、所述第二感知信息、以及所述第三感知信息中,表征同一对象的感知信息;根据预设的所述视觉传感器、所述雷达传感器、以及所述全球导航卫星系统各自对应的感知置信度,从所述第一感知信息、所述第二感知信息、以及所述第三感知信息中,对所述表征同一对象的感知信息进行去冗余处理,得到去冗余处理后的感知信息;
对所述去冗余处理后的感知信息进行融合处理,得到所述环境感知信息。8.根据权利要求6或7所述的方法,其中,所述视觉传感器的感知置信度是由,所述视觉传感器对样本路径进行感知得到的感知信息的全面程度和准确程度确定的;所述雷达传感器的感知置信度是由,所述雷达传感器对样本路径进行感知得到的感知信息的全面程度和准确程度确定的;所述全球导航卫星系统的感知置信度是由,所述全球导航卫星系统对样本路径进行感知得到的感知信息的全面程度和准确程度确定的。9.根据权利要求1-8中任一项所述的方法,所述方法还包括:将所述矿山路径的地图传输给实现矿山作业的自动驾驶车辆,其中,所述矿山路径的地图用于控制所述实现矿山作业的自动驾驶车辆的行驶。10.一种地图生成装置,所述装置包括:获取单元,用于获取自动驾驶车辆行驶的矿山路径的环境感知信息,其中,所述环境感知信息是基于部署于所述自动驾驶车辆的视觉传感器、雷达传感器、以及全球导航卫星系统采集到的;确定单元,用于根据所述环境感知信息确定所述矿山路径的道路边界;生成单元,用于根据所述环境感知信息和所述道路边界,生成所述矿山路径的地图。11.根据权利要求10所述的装置,其中,所述确定单元,包括:第一确定子单元,用于根据所述环境感知信息确定所述矿山路径的矿山墙根坐标;偏移子单元,用于根据所述环境感知信息,将所述矿山墙根坐标向所述矿山路径的中心位置做偏移处理,得到所述道路边界。12.根据权利要求11所述的装置,其中,所述偏移子单元,包括:第一确定模块,用于根据所述环境感知信息,确定所述矿山墙根坐标往所述矿山路径的中心位置的移动方向;偏移模块,用于根据所述移动方向将所述矿山墙根坐标偏移预设距离,得到边界坐标,所述道路边界包括所述边界坐标。13.根据权利要求10-12中任一项所述的装置,若所述矿山路径为矿山作业的路径中的部分路径;所述装置还包括:更新单元,用于根据所述矿山路径的地图,对获取到的所述矿山作业的路径对应的全局地图进行更新处理,得到更新后的地图。14.根据权利要求13所述的装置,其中,所述更新单元,包括:第二确定子单元,用于确定所述矿山路径的地图的起始位置信息和终点位置信息;第三确定子单元,用于根据所述起始位置信息和所述终点位置信息,确定所述全局地图中的待更新区域;替换子单元,用于将所述待更新区域替换为所述矿山路径的地图,得到所述更新后的地图。15.根据权利要求10-14中任一项所述的装置,其中,所述获取单元,包括:获取子单元,用于获取基于所述视觉传感器采集到的第一感知信息、基于所述雷达传感器采集到的第二感知信息、以及基于所述全球导航卫星系统采集到的第三感知信息;生成子单元,用于根据所述第一感知信息、所述第二感知信息、以及所述第三感知信
息,生成所述环境感知信息。16.根据权利要求15中任一项所述的装置,其中,所述生成子单元,包括:第二确定模块,用于确定所述第一感知信息、所述第二感知信息、以及所述第三感知信息中,表征同一对象的感知信息;去冗余模块,用于根据预设的所述视觉传感器、所述雷达传感器、以及所述全球导航卫星系统各自对应的感知置信度,从所述第一感知信息、所述第二感知信息、以及所述第三感知信息中,对所述表征同一对象的感知信息进行去冗余处理,得到去冗余处理后的感知信息;融合模块,用于对所述去冗余处理后的感知信息进行融合处理,得到所述环境感知信息。17.根据权利要求15或16所述的装置,其中,所述视觉传感器的感知置信度是由,所述视觉传感器对样本路径进行感知得到的感知信息的全面程度和准确程度确定的;所述雷达传感器的感知置信度是由,所述雷达传感器对样本路径进行感知得到的感知信息的全面程度和准确程度确定的;所述全球导航卫星系统的感知置信度是由,所述全球导航卫星系统对样本路径进行感知得到的感知信息的全面程度和准确程度确定的。18.根据权利要求10-17中任一项所述的装置,所述装置还包括:传输单元,用于将所述矿山路径的地图传输给实现矿山作业的自动驾驶车辆,其中,所述矿山路径的地图用于控制所述实现矿山作业的自动驾驶车辆的行驶。19.一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-9中任一项所述的方法。20.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-9中任一项所述的方法。21.一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现权利要求1-9中任一项所述方法的步骤。22.一种电子地图,所述电子地图是根据如权利要求1-9中任一项所述的方法生成的。23.一种地图生成系统,包括:如权利要求10-18中任一项所述的装置;自动驾驶车辆,用于采集矿山路径的环境感知信息。
技术总结
本公开提供了一种地图生成方法和装置,涉及计算机技术和人工智能技术,尤其涉及地图技术和自动驾驶技术。具体实现方案为:获取自动驾驶车辆行驶的矿山路径的环境感知信息。其中,环境感知信息是基于部署于自动驾驶车辆的视觉传感器、雷达传感器、以及全球导航卫星系统采集到的,根据环境感知信息确定矿山路径的道路边界,根据环境感知信息和道路边界,生成矿山路径的地图,可以提高环境感知信息的多样性、充分性、可靠性,以使得道路边界具有较高的准确性,进而使得矿山路径的地图可以准确且可靠地还原矿山路径的特征,实现了生成矿山路径地图的自动化和智能化,且使得矿山路径地图具有较高的准确性和有效性。有较高的准确性和有效性。有较高的准确性和有效性。
技术研发人员:郑林波 黄轩 侯兆资 熊伟
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:2022.10.24
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。