1.本发明涉及一种处理装置,尤其涉及一种集成电路制造用表面处理装置。
背景技术:
2.科研人员在制造集成电路的过程中,为了能够提高集成电路的性能,通常会将集成电路的表面进行一系列的处理,其中由分段切割、打磨和喷漆处理,现在一般采用切割机器对集成电路进行切割,然后人工将集成电路一个个固定在工作台上,使用打磨器对集成电路的表面进行打磨,在打磨过程中,为了避免伤害到人们,人们通常会事前进行防护工作,打磨完成后,将喷漆机对准集成电路的外表进行喷漆工作,由于是人工操作,因此在喷漆过程中,容易将油漆喷到其他地方,不仅造成浪费,而且喷漆不均匀,容易导致集成电路报废。
3.为了能够解决上述的问题,现在研发一种能够实现自动对集成电路进行打磨和喷漆的集成电路制造用表面处理装置。
技术实现要素:
4.为了克服现在的处理方式,打磨费时间,容易造成油漆浪费,而且喷漆不均匀的缺点,技术问题:提供一种能够实现自动对集成电路进行打磨和喷漆的集成电路制造用表面处理装置。
5.技术方案:一种集成电路制造用表面处理装置,包括有工作箱、磨砂板、箱盖、支撑架、送料机构、处理机构和打磨机构,支撑架顶部设有工作箱,工作箱后部中间的下部开有方槽,工作箱顶部盖有箱盖,工作箱内设有送料机构,工作箱内设有处理机构,工作箱内设有打磨机构,打磨机构的部件上滑动式连接有磨砂板。
6.进一步地,送料机构包括有送料板、滑轨、第一弹簧和第一距离传感器,工作箱内顶壁中间设有两个滑轨,滑轨之间滑动式连接有送料板,送料板下部开有圆孔,送料板下部和工作箱滑动式连接,送料板前侧的中间设有第一距离传感器,送料板前部上下两侧和工作箱内壁前侧之间均设有第一弹簧。
7.进一步地,处理机构包括有电动推杆、推料板、光电传感器、卡紧块和第二弹簧,工作箱内壁前侧的中间连接有电动推杆,电动推杆伸缩杆后侧设有推料板,推料板后侧中间设有光电传感器,推料板上下两侧均左右对称滑动式连接有卡紧块,卡紧块和推料板之间均设有第二弹簧。
8.进一步地,打磨机构包括有定位板、滑杆、活动板、螺纹杆和第三弹簧,工作箱内壁右前侧设有定位板,定位板后部上下两侧均设有滑杆,滑杆之间滑动式连接有活动板,定位板后部中间和工作箱之间转动式连接有螺纹杆,螺纹杆和活动板螺纹式连接,活动板和磨砂板滑动式连接,磨砂板和活动板之间上下两侧均设有第三弹簧。
9.进一步地,还包括有驱动机构,驱动机构包括有双轴减速电机、磁铁杆、第一皮带和第二皮带,工作箱底部中间设有双轴减速电机,工作箱前部中间的下侧转动式连接有磁
铁杆,双轴减速电机前侧的输出轴和磁铁杆前侧通过第一传动轮之间绕有第一皮带,双轴减速电机后侧的输出轴和螺纹杆后侧之间通过第二传动轮之间绕有第二皮带。
10.进一步地,还包括有喷漆机构,喷漆机构包括有滑套、增压泵、喷头、油漆罐、第二距离传感器、第三距离传感器、管道、电磁阀和伺服电机,工作箱内壁左侧的前后两侧均连接有滑套,滑套之间转动式连接有增压泵,增压泵右侧设有喷头,工作箱底部左侧设有油漆罐,油漆罐前侧设有电磁阀,工作箱内底壁左侧设有第三距离传感器,电磁阀前侧设有管道,管道穿过工作箱,管道上部和增压泵前侧转动式连接,工作箱内后壁左上侧设有第二距离传感器,工作箱内壁左后侧设有伺服电机,伺服电机输出轴前侧和增压泵连接。
11.进一步地,还包括有抹匀机构,抹匀机构包括有螺纹帽、海绵棒和扭力弹簧,工作箱内底壁左后侧设有螺纹帽,螺纹帽上部转动式连接有海绵棒,海绵棒和螺纹帽之间设有扭力弹簧。
12.进一步地,还包括有控制箱,工作箱前侧的中部上侧设有控制箱,控制箱内安装有开关电源、控制模块和电源模块,开关电源为整个集成电路制造用表面处理装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器、第二距离传感器、第三距离传感器和光电传感器通过电性和控制模块连接,电动推杆、双轴减速电机、伺服电机、增压泵和电磁阀通过外围电路和控制模块连接。
13.本发明具有以下优点:1、本发明采用推动集成电路的方式,将集成电路卡进送料板,然后将送料板慢慢靠近推料板,进而使得卡紧块能够对送料板进行固定,同时集成电路被固定住,如此能够在处理集成电路前做好充足的准备工作。
14.2、本发明采用螺纹杆旋转的方式,能够将活动板进行前后移动,进而使得磨砂板进行前后移动对集成电路的表面进行打磨处理,这样能够使得集成电路表面更加光滑,为喷漆处理做好前期准备。
15.3、本发明采用伺服电机工作的模式,促使增压泵不断抽取油漆,进而由喷头将油漆均匀的喷洒到集成电路上面。
16.4、本发明采用海绵棒在集成电路上进行滚动的方式,能够将集成电路表面的油漆涂抹均匀。
附图说明
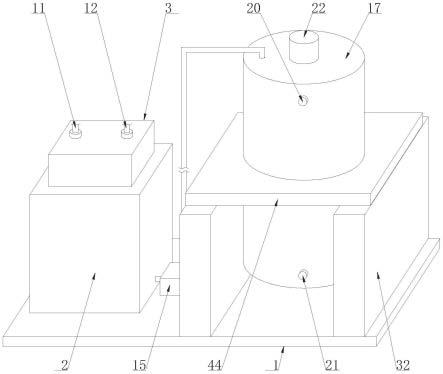
17.图1为本发明的立体结构示意图。
18.图2为本发明的第一视角部分立体结构示意图。
19.图3为本发明的第二视角部分立体结构示意图。
20.图4为本发明的第三视角部分立体结构示意图。
21.图5为本发明送料机构的立体结构示意图。
22.图6为本发明处理机构的第一种部分立体结构示意图。
23.图7为本发明处理机构的第二种部分立体结构示意图。
24.图8为本发明打磨机构的第一种部分立体结构示意图。
25.图9为本发明打磨机构的第二种部分立体结构示意图。
26.图10为本发明喷漆机构的第一种部分立体结构示意图。
27.图11为本发明喷漆机构的第二种部分立体结构示意图。
28.图12为本发明驱动机构的第一种部分立体结构示意图。
29.图13为本发明驱动机构的第二种部分立体结构示意图。
30.图14为本发明抹匀机构的第一种部分立体结构示意图。
31.图15为本发明抹匀机构的第二种部分立体结构示意图。
32.图16为本发明抹匀机构的第三种部分立体结构示意图。
33.图17为本发明的电路框图。
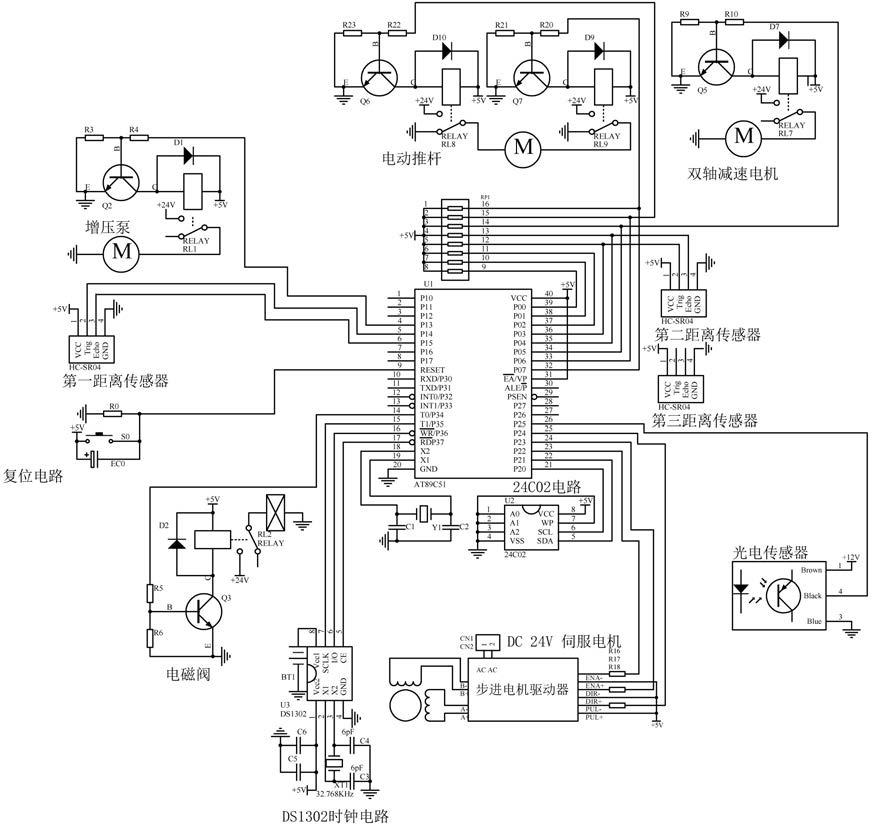
34.图18为本发明的电路原理图。
35.附图中的标记:1:工作箱,11:磨砂板,12:箱盖,2:控制箱,3:支撑架,4:送料机构,41:送料板,42:滑轨,43:第一弹簧,44:第一距离传感器,5:处理机构,51:电动推杆,52:推料板,53:光电传感器,54:卡紧块,55:第二弹簧,6:打磨机构,61:定位板,62:滑杆,63:活动板,64:螺纹杆,65:第三弹簧,7:喷漆机构,71:滑套,72:增压泵,73:喷头,74:油漆罐,75:第二距离传感器,76:第三距离传感器,77:管道,78:电磁阀,79:伺服电机,8:驱动机构,81:双轴减速电机,82:磁铁杆,84:第一皮带,85:第二皮带,9:抹匀机构,91:螺纹帽,92:海绵棒,93:扭力弹簧。
具体实施方式
36.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
37.实施例1一种集成电路制造用表面处理装置,如图1-18所示,包括有工作箱1、磨砂板11、箱盖12、支撑架3、送料机构4、处理机构5和打磨机构6,支撑架3顶部通过螺栓设有工作箱1,工作箱1后部中间的下部开有方槽,工作箱1顶部盖有用于遮挡的箱盖12,工作箱1内设有用于推送集成电路的送料机构4,工作箱1内设有处理机构5,工作箱1内设有打磨机构6,打磨机构6的部件上滑动式连接有用于打磨集成电路的磨砂板11。
38.送料机构4包括有送料板41、滑轨42、第一弹簧43和第一距离传感器44,工作箱1内顶壁中间设有两个滑轨42,滑轨42之间滑动式连接有送料板41,送料板41下部和工作箱1滑动式连接,送料板41下部开有圆孔,送料板41前侧的中间设有第一距离传感器44,送料板41前部上下两侧和工作箱1内壁前侧之间均设有第一弹簧43,第一弹簧43将送料板41进行复位。
39.处理机构5包括有电动推杆51、推料板52、光电传感器53、卡紧块54和第二弹簧55,工作箱1内壁前侧的中间连接有电动推杆51,电动推杆51伸缩杆后侧固定连接有推料板52,推料板52后侧中间设有光电传感器53,推料板52上下两侧均左右对称滑动式连接有用于卡紧送料板41的卡紧块54,卡紧块54和推料板52之间均设有第二弹簧55。
40.打磨机构6包括有定位板61、滑杆62、活动板63、螺纹杆64和第三弹簧65,工作箱1内壁右前侧设有定位板61,定位板61后部上下两侧均设有滑杆62,滑杆62之间滑动式连接有活动板63,定位板61后部中间和工作箱1之间通过转动的方式连接有螺纹杆64,螺纹杆64
和活动板63螺纹式连接,活动板63和磨砂板11滑动式连接,磨砂板11和活动板63之间上下两侧均设有第三弹簧65。
41.当人们需要对集成电路的表面进行处理时,可以先将集成电路插进方槽内,然后使得集成电路前侧卡进送料板41的后侧,而且人们手动将集成电路向前推动带动送料板41和第一距离传感器44向前移动,使得第一弹簧43被压缩,当第一距离传感器44检测到和推料板52之间的距离小于额定值时,控制模块控制电动推杆51的伸缩杆进行伸长运动,带动推料板52、卡紧块54和第二弹簧55向后移动慢慢靠近送料板41,当卡紧块54和送料板41接触时,使得卡紧块54向外侧移动,第二弹簧55被压缩,当送料板41移动至和推料板52贴合时,在第二弹簧55的作用下,带动卡紧块54向内侧移动复位对送料板41卡紧,此时光电传感器53检测到光亮值小于额定值,控制模块控制电动推杆51停止工作,此时人们即可松开集成电路,集成电路的位置被限制,随后手动转动螺纹杆64,使得活动板63不断前后移动,带动磨砂板11和第三弹簧65不断前后移动,在第三弹簧65的作用下,使得磨砂板11自动对集成电路表面进行不断打磨,打磨完成后,可以停止转动螺纹杆64,然后打开箱盖12,将集成电路的左侧面调换到右侧后,继续进行打磨处理,完成后将卡紧块54分别向外侧拨动,使得第二弹簧55被压缩,使得卡紧块54松开送料板41,在第一弹簧43的作用下,带动送料板41、第一距离传感器44和集成电路向后移动复位,人们即可取出集成电路,同时松开卡紧块54,在第二弹簧55的作用下,带动卡紧块54向内侧移动复位,此时光电传感器53检测到光亮值大于额定值,控制模块控制电动推杆51的伸缩杆收缩复位,收缩时间与伸长时间相同,收缩时间到达后自动停止工作,重复以上操作即可实现自动对集成电路的表面进行处理的效果。
42.还包括有驱动机构8,驱动机构8包括有双轴减速电机81、磁铁杆82、第一皮带84和第二皮带85,工作箱1底部中间通过螺栓设有双轴减速电机81,工作箱1前部中间的下侧通过转动的方式连接有磁铁杆82,双轴减速电机81前侧的输出轴和磁铁杆82前侧通过第一传动轮之间绕有第一皮带84,双轴减速电机81后侧的输出轴和螺纹杆64后侧之间通过第二传动轮之间绕有第二皮带85。
43.送料板41向前移动带动集成电路向前移动,送料板41向前移动通过圆孔穿进磁铁杆82上时,磁铁杆82将集成电路向后顶出送料板41,由于集成电路为铁制品,因此磁铁杆82通过磁性能够对集成电路进行固定;当光电传感器53检测到光亮值小于额定值时,控制模块控制双轴减速电机81进行正反交替工作1分钟后停止工作,双轴减速电机81输出轴转动通过第一传动轮带动第一皮带84转动,进而使得磁铁杆82进行转动,磁铁杆82带动集成电路进行缓慢旋转,集成电路的左右两面进行交替和磨砂板11接触,集成电路不断转动过程中,会将磨砂板11间隔向右挤压,而且在第三弹簧65的作用下,使得磨砂板11始终保持和集成电路贴合;双轴减速电机81输出轴转动通过第二传动轮带动第二皮带85转动,使得螺纹杆64进行正反交替转动,进而使得磨砂板11进行不断前后移动对集成电路进行打磨。
44.还包括有喷漆机构7,喷漆机构7包括有滑套71、增压泵72、喷头73、油漆罐74、第二距离传感器75、第三距离传感器76、管道77、电磁阀78和伺服电机79,工作箱1内壁左侧的前后两侧均连接有滑套71,滑套71之间通过转动的方式连接有增压泵72,增压泵72右侧设有喷头73,工作箱1底部左侧设有油漆罐74,油漆罐74前侧设有电磁阀78,工作箱1内底壁左侧设有第三距离传感器76,电磁阀78前侧设有管道77,管道77穿过工作箱1,管道77上部和增
压泵72前侧转动式连接,工作箱1内后壁左上侧设有第二距离传感器75,工作箱1内壁左后侧设有伺服电机79,伺服电机79输出轴前侧和增压泵72连接。
45.当人们需要将打磨后的集成电路进行喷漆时,可以将油漆装进油漆罐74内,当双轴减速电机81停止工作的同时,控制模块控制电磁阀78和增压泵72进行工作2分钟后停止工作,使得油漆通过管道77流进增压泵72内,同时油漆会通过喷头73向右喷出到集成电路的左侧进行喷漆,当增压泵72开始工作的同时,控制模块控制伺服电机79进行转动,伺服电机79输出轴转动带动增压泵72进行正转,进而使得喷头73进行向下摆动,当喷头73靠近第三距离传感器76时,第三距离传感器76检测到和喷头73之间的距离值小于额定值时,控制模块控制伺服电机79输出轴进行反向转动,带动增压泵72进行反转,同时带动喷头73进行向上摆动,当第二距离传感器75检测到和喷头73之间的距离值小于额定值时,控制模块控制伺服电机79输出轴进行正向工作,如此即可循环使得喷头73进行上下摆动,使得喷洒油漆更加均匀,而且当集成电路左侧被喷漆完成后,可以手动将集成电路的未喷漆面朝向左侧,集成电路的两面都喷漆完成,电磁阀78和增压泵72在工作2分钟后停止工作,同时控制模块控制伺服电机79也停止工作,通过拨动卡紧块54松开送料板41,进而使得送料板41向后移动,将集成电路向后移出,使得集成电路和磁铁杆82分离。
46.还包括有抹匀机构9,抹匀机构9包括有螺纹帽91、海绵棒92和扭力弹簧93,工作箱1内底壁左后侧设有螺纹帽91,螺纹帽91上部通过转动的方式连接有海绵棒92,海绵棒92用于将油漆进行均匀涂抹,海绵棒92和螺纹帽91之间设有扭力弹簧93。
47.当集成电路被喷漆完成后向后移动时,集成电路和海绵棒92接触,带动海绵棒92进行转动,使得扭力弹簧93被扭转,海绵棒92会对集成电路表面的油漆进行均匀涂抹,当集成电路和海绵棒92分离时,在扭力弹簧93的作用下,带动海绵棒92转动复位。
48.还包括有控制箱2,工作箱1前侧的中部上侧设有控制箱2,控制箱2内安装有开关电源、控制模块和电源模块,开关电源为整个集成电路制造用表面处理装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接,控制模块上连接有ds1302时钟电路和24c02电路,第一距离传感器44、第二距离传感器75、第三距离传感器76和光电传感器53通过电性和控制模块连接,电动推杆51、双轴减速电机81、伺服电机79、增压泵72和电磁阀78通过外围电路和控制模块连接。
49.应当理解,以上的描述仅仅用于示例性目的,并不意味着限制本发明。本领域的技术人员将会理解,本发明的变型形式将包含在本文的权利要求的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。