1.本技术涉及工程检测技术领域,尤其是涉及一种高层建筑检测无人机。
背景技术:
2.高层建筑是指建筑高度大于27m的建筑物,高层建筑在建造时,会常常使用到钢结构,钢结构是由钢制材料组成的结构,是主要的建筑结构类型之一,钢结构主要由型钢和钢板等制成的钢梁、钢柱、钢桁架等构件组成,并采用硅烷化、纯锰磷化、水洗烘干、镀锌等除锈防锈工艺,其各个构件或部件之间通常采用焊接,而在施工完成后,需要对部件之间的焊缝进行检测,检测焊缝是否存在有裂缝,检测方法分为人工巡检和无人机检测,在一些人员无法观测和到达的混凝土高层位置常通过无人机进行检测。
3.针对上述中的相关技术,发明人认为存在有以下缺陷:现有技术中,通过无人机对刚结构进行检测时,无人机需要进行悬停,而无人机在高层的狂风作用下容易出现悬停不稳定情况,致使检测不稳定的问题。
技术实现要素:
4.为了提高检测装置检测的稳定性,本技术提供一种高层建筑检测无人机。
5.本技术提供的一种高层建筑检测无人机采用如下的技术方案:
6.一种高层建筑检测无人机,包括无人机机身、连接于无人机机身的飞行装置以及设置于无人机机身以对建筑外立面的钢结构进行检测的检测装置,所述无人机机身设置有可吸附于建筑外立面钢结构上的吸附件,所述无人机机身设置有驱动吸附件向建筑外立面进行移动的驱动组件。
7.通过采用上述技术方案,在需要对钢结构进行检测时,先将无人机飞到需要进行检测的位置进行悬停,然后通过驱动组件驱动吸附件向钢材进行移动,使得吸附件吸附于钢材上,从而提高无人机飞行的稳定性,从而提高检测的稳定性。
8.优选的,所述驱动组件设置于无人机机身的下方,所述驱动组件包括滑移杆、伸缩架、驱动件,所述滑移杆设置于无人机机身,所述伸缩架沿滑移杆的长度方向滑移连接于滑移杆,所述驱动件驱动伸缩架沿滑移杆的长度方向进行滑移,所述吸附件设置于伸缩杆的伸出端。
9.通过采用上述技术方案,无人机在悬停后,通过驱动件驱动伸缩架进行滑移,从而驱动吸附件向钢材进行移动,使得吸附件吸附于钢材上。
10.优选的,所述滑移杆靠近伸缩架的侧面开设有第一滑移槽,所述伸缩架设置有滑移连接于第一滑移槽的滑块,所述驱动组件还包括有传动丝杆,所述传动丝杆的轴线方向与滑移杆的长度方向平行,传动丝杆的两端转动连接于无人机机身,传动丝杆螺纹连接有驱动块,所述驱动块连接于伸缩架,所述驱动件为驱动电机,所述驱动电机驱动传动丝杆进行转动。
11.通过采用上述技术方案,驱动电机驱动传动丝杆进行转动,从而通过驱动块驱动
伸缩架进行滑移。
12.优选的,所述吸附件为电磁铁。
13.通过采用上述技术方案,吸附件设置为电磁铁,在需要检测时,对电磁铁进行通电,电磁铁产生磁性并吸附于钢材上,而在检测完后,对电磁铁进行断电,即可对电磁铁的吸附状态进行解除。
14.优选的,所述无人机机身的下方设置有转动杆,所述转动杆的下方设置有转动盘,所述检测装置设置于转动盘的下方,所述转动杆同轴设置有齿轮,所述驱动块设置有可与齿轮进行啮合并驱动齿轮进行转动的齿条。
15.通过采用上述技术方案,可通过齿条驱动齿轮进行转动,齿轮通过转动杆带动检测机构进行转动,从而提高检测机构的检测范围。
16.优选的,所述驱动块设置有第一限位块,所述伸缩架开设有供第一限位块进行卡设的第一限位槽,所述驱动块设置有迫使第一限位块卡设于第一限位槽的第一弹性件,所述第一限位块设置有弹性绳,所述弹性绳的一端连接于第一限位块,所述弹性绳的一端连接于无人机机身,当所述电磁铁吸附于建筑外立面上的钢结构时,所述弹性绳处于绷紧状态并迫使第一限位块脱离于第一限位槽,所述驱动块的上端面始终与伸缩架的下端面抵接。
17.通过采用上述技术方案,通过驱动电机驱动传动丝杆进行转动,传动丝杆通过驱动块驱动伸缩架向检测位置进行滑移,并使得电磁铁吸附于钢结构上,此时弹性绳处于紧绷状态并带动第一限位块脱离于限位槽,且驱动块的始终与伸缩架的下端面进行转动,然后继续转动传动丝杆,驱动块继续向前移动使得齿条与齿轮进行啮合,从而可通过齿条带动齿轮进行转动并转动检测装置,从而提高检测范围。
18.优选的,所述检测装置的上方凸出设置有凸台,所述转动盘开设有供凸台进行卡设的凹槽,所述凹槽的槽壁设置有对检测装置进行限位的第二限位块,所述凸台设置有供第二限位块进行卡设的第二限位槽。
19.通过采用上述技术方案,可将检测装置上的凸台卡设于凹槽内,并通过第二限位块卡设于第二限位槽内,从而对检测装置进行固定。
20.优选的,所述转动盘设置有迫使第二限位块卡设于第二限位槽的第二弹性件,所述凸台设置有第一楔形面,所述第二限位块设置有可与第一楔形面进行抵接配合的第二楔形面,当所述凸台向卡设于凹槽进行移动时,所述第一楔形面通过第二楔形面迫使第二限位块向不干涉凸台移动的方向进行移动。
21.通过采用上述技术方案,在将凸台卡设于凹槽时,凸台的第一楔形面与第二限位块的第二楔形面进行抵接,继续迫使凸台进行滑移使得第二限位块向不干涉凸台移动的方向进行移动,当凸台完全卡设于凹槽时,第二限位块在弹性件的作用下卡设于第二限位槽内,从而对检测装置进行固定,提高了检测装置安装的便利性。
22.综上所述,本实用新型具有以下有益效果:
23.1、设置有电磁铁,通过驱动组件驱动电磁铁向钢材进行移动,使得电磁铁吸附于钢材上,从而提高无人机飞行的稳定性,从而提高检测的稳定性;
24.2、可通过驱动电机驱动传动丝杆进行转动,传动丝杆通过驱动块驱动伸缩架向检测位置进行滑移,并使得电磁铁吸附于钢结构上,此时弹性绳处于紧绷状态并带动第一限
位块脱离于限位槽,且驱动块的始终与伸缩架的下端面进行转动,然后继续转动传动丝杆,驱动块继续向前移动使得齿条与齿轮进行啮合,从而可通过齿条带动齿轮进行转动并转动检测装置,从而提高检测范围。
附图说明
25.图1是本实施例一种高层建筑检测无人机的整体结构示意图;
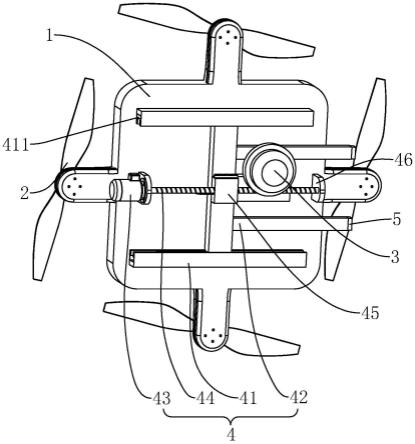
26.图2是本实施例中驱动组件的结构示意图;
27.图3是本实施例中伸缩架的结构示意图;
28.图4是本实施例中第二限位块的结构示意图。
29.图中,1、无人机机身;2、飞行装置;3、检测装置;31、转动杆;32、转动盘;33、齿轮;34、凸台;35、凹槽;36、第二限位块;361、第二弹簧;362、操纵绳;37、第二限位槽;38、第三滑移槽;4、驱动组件;41、滑移杆;411、第一滑移槽;42、伸缩架;421、第一限位槽;422、滑块;43、驱动电机;44、传动丝杆;45、驱动块;451、第二滑移槽;452、第一弹簧;453、齿条;454、第一限位块;455、弹性绳;46、固定座;5、电磁铁。
具体实施方式
30.以下结合附图1-4对本技术作进一步详细说明。
31.本技术实施例公开一种高层建筑检测无人机,参照图1、图2、,包括无人机机身1、固定连接于无人机机身1的飞行装置2以及设置于无人机机身1以对建筑外立面的钢结构进行检测的检测装置3,无人机机身1设置有可吸附于建筑外立面的钢结构的吸附件,吸附件为电磁铁5,无人机机身1设置有驱动吸附件向建筑外立面进行移动的驱动组件4。
32.参照图2、图3,驱动组件4包括滑移杆41、伸缩架42、传动丝杆44以及驱动件,滑移杆41设置有两个,两个滑移杆41呈平行设置,伸缩架42沿滑移杆41的长度方向滑移连接于滑移杆41。伸缩架42位于两个滑移杆41之间,滑移杆41靠近伸缩架42的侧面开设有第一滑移槽411,伸缩架42的靠近滑移杆41的两端均设置有滑移连接于第一滑移槽411的滑块422,电磁铁5固定连接于伸缩架42的滑移伸出端。
33.参照图2、图3,传动丝杆44的轴线方向与滑移杆41的长度方向平行,位于传动丝杆44的两端均设置有固定座46,固定座46的上端固定连接于无人机机身1的下端面,传动丝杆44的两端均转动连接于两个固定座46。传动丝杆44螺纹连接有驱动块45,驱动块45位于伸缩架42的下方,驱动块45的上端面抵接于伸缩架42的下端面。驱动件为驱动电机43,驱动电机43固定连接于远离伸缩架42的滑移伸出端的固定座46,驱动电机43的输出轴同轴固定连接于传动丝杆44。
34.参照图2、图3,驱动块45的上端面沿竖直方向开设有第二滑移槽451,驱动块45设置有滑移连接于第二滑移槽451的第一限位块454,伸缩架42的下端面开设有供第一限位块454进行卡设的第一限位槽421。驱动块45设置有两个迫使第一限位块454卡设于第一限位槽421的第一弹性件,第一弹性件为第一弹簧452,第一弹簧452位于第二滑移槽451内,两个第一弹簧452沿第二滑移槽451的长度方向分布,第一弹簧452的一端固定连接于第一限位块454的下端面,第一弹簧452的另一端固定连接于第二滑移槽451的槽壁。驱动块45设置有对第一限位块454的限位状态进行解除的弹性绳455,弹性绳455的一端固定连接于第一限
位块454的下端面,弹性绳455的另一端穿设于驱动块45并固定连接于无人机机身1,当驱动块45运动至使得电磁铁5抵接于建筑外立面的钢结构时,弹性绳455处于绷紧状态并使得第一限位块454脱离于第一限位槽421,驱动块45的上端面始终与伸缩架42的下端面抵接。
35.参照图2、图3、图4,无人机机身1的下端面位于传动丝杆44的一侧设置有转动杆31,转动杆31位于远离驱动电机43的一侧。转动杆31的下端同轴固定连接有转动盘32,检测装置3设置于转动盘32的下方,转动杆31中部的周壁同轴固定连接于有齿轮33,驱动块45靠近转动杆31的一侧固定连接有可与齿轮33进行啮合并驱动齿轮33进行转动的齿条453。
36.参照图2、图3、图4,检测装置3的上方设置有凸台34,转动盘32开设有供凸台34进行卡设的圆形凹槽35,凹槽35的周壁开设有两个第三滑移槽38,两个第三滑移槽38沿凹槽35的轴线呈对称分布,转动盘32设置有滑移连接于第三滑移槽38的第二限位块36,凸台34的周壁开设有供第二限位块36进行卡设的第二限位槽37。转动盘32设置有迫使第二限位块36卡设于第二限位槽37的第二弹性件,第二弹性件为第二弹簧361,第二弹簧361位于第三滑移槽38内,第二弹簧361的一端固定连接于第二限位块36,第二弹簧361的另一端固定连接于第二限位槽37的槽壁。第二限位块36远离第二限位槽37的一端固定连接有操纵绳362,操纵绳362的另一端穿设并凸出于转动盘32的外周壁。凸台34设置有第一楔形面,第二限位块36设置有可与第一楔形面进行抵接配合的第二楔形面,当凸台34卡设滑移于凹槽35内时,第一楔形面通过第二楔形面迫使第二限位块36向第三滑移槽38的方向进行移动。
37.本技术实施例一种高层建筑检测无人机的实施原理为:在需要对高层建筑外立面的钢结构进行检测时,首先将无人机飞到需要检测的位置,然后无人机进行悬停,接着通过驱动电机43驱动传动丝杆44进行转动,传动丝杆44通过驱动块45驱动伸缩架42向检测位置进行滑移,并使得电磁铁5吸附于钢结构上,此时弹性绳455处于紧绷状态并带动第一限位块454脱离于限位槽,且驱动块45的始终与伸缩架42的下端面进行转动,然后继续转动传动丝杆44,驱动块45继续向前移动使得齿条453与齿轮33进行啮合,从而可通过齿条453带动齿轮33进行转动并转动检测装置3,从而提高检测范围。
38.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。