技术特征:
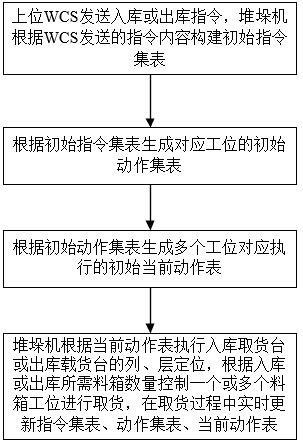
1.一种多工位料箱堆垛机控制方法,其特征在于:在堆垛机载货台上布置了至少三个料箱工位,每个料箱工位上配备一套货叉,每套货叉由独立的电机驱动,所述控制方法包括如下步骤:s1:上位wcs发送入库或出库指令,堆垛机根据wcs发送的指令内容构建初始多指令集表;s2:根据初始指令集表生成对应工位的初始动作集表;s3:根据初始动作集表生成多个工位对应执行的初始当前动作表;s4:堆垛机根据当前动作表执行入库取货台或出库送货台的列、层定位,根据入库或出库所需料箱数量控制一个或多个料箱工位进行取货,在取货过程中实时更新指令集表、动作集表、当前动作表。2.根据权利要求1所述的一种多工位料箱堆垛机控制方法,其特征在于:所述指令集表中设置了指令集的状态、指令集编号、指令集类型、各个工位对应指令的状态、指令编号、货架地址。3.根据权利要求2所述的一种多工位料箱堆垛机控制方法,其特征在于:所述动作集表是指要完成指令集中的指令功能,需要完成的动作合集;根据对入库和出库指令动作的描述,要完成一个指令集表的功能;对于多料箱工位的入库是根据送货地址距离入库台远近,依次执行,对于多料箱工位的出库是从最大取货地址,依次取货。4.根据权利要求3所述的一种多工位料箱堆垛机控制方法,其特征在于:所述动作集表中设置了动作集表总状态、各个工位的指令编号、动作序号,每个动作序号对应的动作状态、指令集类型、取送货类型、工位组合代码、目标地址排号、目标地址列号、目标地址层号。5.根据权利要求4所述的一种多工位料箱堆垛机控制方法,其特征在于:所述当前动作表中设置了动作表状态、某个动作对应动作集表中动作序号、各工位的指令编号、指令集类型、存取类型、操作工位代码、工作地址排号、工作地址列号、工作地址层号、列激光值、层高位激光值、层低位激光值。6.根据权利要求4所述的一种多工位料箱堆垛机控制方法,其特征在于:所述动作集表总状态包括:空闲;动作集建立完成;序号1动作正在执行;序号2动作正在执行;序号3动作正在执行;序号4动作正在执行;
……
;序号n动作正在执行;动作集动作全部执行完成。7.根据权利要求5所述的一种多工位料箱堆垛机控制方法,其特征在于:所述动作表状态包括:本动作表空闲;
本动作正在执行去目标地址的定位;本动作正在执行取货;本动作正在执行送货;本动作执行完成。8.根据权利要求4所述的一种多工位料箱堆垛机控制方法,其特征在于:所述工位组合代码根据具体设置的工位数量,至少包括单工位独立操作、双工位组合操作、三工位同时组合操作。
技术总结
本发明提供了一种多工位料箱堆垛机控制方法,属于堆垛机控制技术领域;解决了现有的多工位堆垛机采用梯形图或语句表的方法时有窜指令、指令中断等问题;在堆垛机载货台上布置了至少三个料箱工位,每个料箱工位上配备一套货叉,每套货叉由独立的电机驱动,包括如下步骤:上位WCS发送入库或出库指令,堆垛机根据WCS发送的指令内容构建初始指令集表;根据初始指令集表生成对应工位的初始动作集表;根据初始动作集表生成多个工位对应执行的初始当前动作表;堆垛机根据当前动作表执行入库取货台或出库送货台的列、层定位,根据入库或出库所需料箱数量控制一个或多个料箱工位进行取货,并实时更新指令集表、动作集表、当前动作表;本发明应用于堆垛机。本发明应用于堆垛机。本发明应用于堆垛机。
技术研发人员:李昊彦 闫胜军 杨俊林 崔明青
受保护的技术使用者:太原市英华众联仓储自动化设备有限公司
技术研发日:2022.11.22
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。