1.本实用新型涉及移栽设备技术领域,特别指一种重载浮动式箱体堆叠夹具。
背景技术:
2.随着自动化行业的发展,针对重型物料进行自动移栽装卸的需求日益旺盛,对于吨级别的物料移栽,三轴龙门架相对于机器人的成本更低,使用条件要求更低,有较高得普及性。然而,传统的三轴龙门架采取非浮动式设计,在抓取重型物料(箱体)进行堆叠时,由于存在精度计算偏差问题,往往无法进行正位堆叠,当堆叠达到一定高度时,将存在安全隐患。
3.因此,如何提供一种重载浮动式箱体堆叠夹具,实现提升箱体堆叠的可靠性,成为一个亟待解决的技术问题。
技术实现要素:
4.本实用新型要解决的技术问题,在于提供一种重载浮动式箱体堆叠夹具,实现提升箱体堆叠的可靠性。
5.本实用新型是这样实现的:一种重载浮动式箱体堆叠夹具,包括:
6.一个机架;
7.一个浮动机构,设于所述机架的上端;
8.四个夹爪,设于所述浮动机构的下端;
9.至少一根定位销,垂直设于所述夹爪的下端;
10.一个plc,与所述浮动机构连接;
11.所述浮动机构包括:
12.一对x轴导轨,平行设于所述机架的上端;
13.一块第一滑动板,两端分别与一所述x轴导轨滑动连接;
14.一对y轴导轨,平行设于所述第一滑动板的上端,并与所述x轴导轨垂直;
15.一块第二滑动板,两端分别与一所述y轴导轨滑动连接;
16.一个x轴气缸,设于所述机架上,动力输出端与所述第一滑动板连接;
17.一个y轴气缸,设于所述第一滑动板上,动力输出端与所述第二滑动板连接;
18.一个z轴气缸,设于所述第二滑动板上,动力输出端朝上;
19.一块升降板,设于所述第二滑动板的上方,与所述z轴气缸的动力输出连接;各所述夹爪设于升降板的下端;
20.三个电磁阀,分别与所述x轴气缸、y轴气缸以及z轴气缸的进气口连通,并与所述plc连接;
21.三个调压阀,分别与一所述电磁阀连通,并与所述plc连接。
22.进一步地,所述浮动机构还包括:
23.三个定位轴,一端分别与所述x轴气缸、y轴气缸以及z轴气缸的动力输出端连接;
24.三个无油衬套,一端分别与一所述定位轴的另一端连接,另一端分别与所述第一滑动板、第二滑动板以及升降板连接。
25.本实用新型的优点在于:
26.通过在机架上设置浮动机构,在浮动机构的下端设置夹爪,在夹爪的下端设置定位销,而浮动机构设有x轴气缸、y轴气缸以及z轴气缸,plc通过x轴气缸、y轴气缸以及z轴气缸联动夹爪抓取箱体,并移动到待堆叠箱体上方由定位销进行初始定位后,plc撤销x轴气缸、y轴气缸以及z轴气缸的动力,让上方的箱体在浮动状态下,由定位销进行引导堆叠,克服传统上的计算偏差问题,进而极大的提升了箱体堆叠的可靠性。
附图说明
27.下面参照附图结合实施例对本实用新型作进一步的说明。
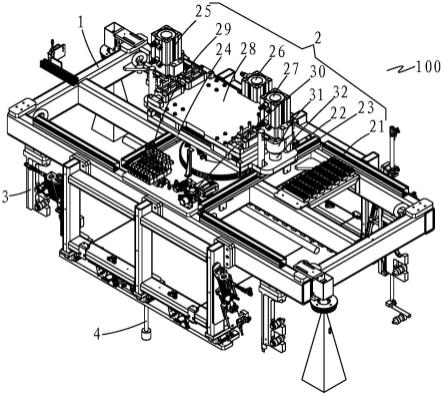
28.图1是本实用新型一种重载浮动式箱体堆叠夹具的结构示意图。
29.图2是本实用新型一种重载浮动式箱体堆叠夹具的电路原理框图。
30.标记说明:
31.100-一种重载浮动式箱体堆叠夹具,1-机架,2-浮动机构,3-夹爪,4-定位销,5-plc,21-x轴导轨,22-第一滑动板,23-y轴导轨,24-第二滑动板,25-x轴气缸,26-y轴气缸,27-z轴气缸,28-升降板,29-电磁阀,30-调压阀,31-定位轴,32-无油衬套。
具体实施方式
32.本实用新型实施例通过提供一种重载浮动式箱体堆叠夹具100,解决了现有技术中三轴龙门架采取非浮动式设计,在抓取箱体进行堆叠时,由于存在精度计算偏差问题,往往无法进行正位堆叠的技术问题,实现极大的提升了箱体堆叠的可靠性的技术效果。
33.本实用新型实施例中的技术方案为解决上述问题,总体思路如下:设置具备x轴、y轴和z轴三轴浮动能力的浮动机构2,通过x轴气缸25、y轴气缸26、z轴气缸27以及定位销4进行初步定位后,撤销x轴气缸25、y轴气缸26和z轴气缸27的动力,让浮动机构2处于浮动状态,进而让箱体在自身重力下,由定位销4进行引导堆叠,以提升箱体堆叠的可靠性。
34.为了更好地理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
35.请参照图1至图2所示,本实用新型一种重载浮动式箱体堆叠夹具100的较佳实施例,包括:
36.一个机架1,用于承载所述重载浮动式箱体堆叠夹具100;
37.一个浮动机构2,设于所述机架1的上端,用于提供x轴、y轴和z轴的浮动,以克服单纯依靠视觉计算位置造成的误差;
38.四个夹爪3,设于所述浮动机构2的下端,用于取放箱体(未图示);
39.至少一根定位销4,垂直设于所述夹爪3的下端,与箱体的定位孔(未图示)匹配,用于箱体堆叠的定位导向;
40.一个plc5,与所述浮动机构2连接;所述plc5用于控制重载浮动式箱体堆叠夹具100的工作,即控制所述电磁阀29的通断以及调压阀30的压力,具体实施时,只要从现有技术中选择能实现此功能的plc即可,并不限于何种型号,且控制程序是本领域技术人员所熟
知的,这是本领域技术人员不需要付出创造性劳动即可获得的;
41.所述浮动机构2包括:
42.一对x轴导轨21,平行设于所述机架1的上端,用于所述第一滑动板22的限位滑动;
43.一块第一滑动板22,两端分别与一所述x轴导轨21滑动连接;
44.一对y轴导轨23,平行设于所述第一滑动板22的上端,并与所述x轴导轨21垂直,用于所述第二滑动板24的限位滑动;
45.一块第二滑动板24,两端分别与一所述y轴导轨23滑动连接;
46.一个x轴气缸25,设于所述机架1上,动力输出端与所述第一滑动板22连接;
47.一个y轴气缸26,设于所述第一滑动板22上,动力输出端与所述第二滑动板24连接;
48.一个z轴气缸27,设于所述第二滑动板24上,动力输出端朝上;
49.一块升降板28,设于所述第二滑动板24的上方,与所述z轴气缸27的动力输出连接;各所述夹爪3设于升降板28的下端;各所述夹爪3通过x轴气缸25、y轴气缸26以及z轴气缸27的驱动,进行x轴、y轴以及z轴方向的位移;
50.三个电磁阀29,分别与所述x轴气缸25、y轴气缸26以及z轴气缸27的进气口(未图示)连通,并与所述plc5连接,用于通断所述进气口,以控制所述x轴气缸25、y轴气缸26以及z轴气缸27进行工作;
51.三个调压阀30,分别与一所述电磁阀29连通,并与所述plc5连接,用于调节所述x轴气缸25、y轴气缸26以及z轴气缸27输出动力的大小。
52.所述浮动机构2还包括:
53.三个定位轴31,一端分别与所述x轴气缸25、y轴气缸26以及z轴气缸27的动力输出端连接;
54.三个无油衬套32,一端分别与一所述定位轴31的另一端连接,另一端分别与所述第一滑动板22、第二滑动板24以及升降板28连接。即所述x轴气缸25通过定位轴31和无油衬套32与第一滑动板22连接,所述y轴气缸26通过定位轴31和无油衬套32与第二滑动板24连接,所述z轴气缸27通过定位轴31和无油衬套32与升降板28连接。
55.本实用新型工作原理:
56.所述plc5导通电磁阀29,通过所述调压阀30给x轴气缸25、y轴气缸26以及z轴气缸27进行供气,进而驱动所述x轴气缸25、y轴气缸26以及z轴气缸27联动夹爪3抓取箱体,并移动到待堆叠箱体上方由定位销4和下方箱体的定位孔进行初始定位后,所述plc5断开电磁阀29,让所述浮动机构2处于浮动状态,让上方的箱体在自身重力下,由所述定位销4进行引导以完成堆叠。
57.综上所述,本实用新型的优点在于:
58.通过在机架上设置浮动机构,在浮动机构的下端设置夹爪,在夹爪的下端设置定位销,而浮动机构设有x轴气缸、y轴气缸以及z轴气缸,plc通过x轴气缸、y轴气缸以及z轴气缸联动夹爪抓取箱体,并移动到待堆叠箱体上方由定位销进行初始定位后,plc撤销x轴气缸、y轴气缸以及z轴气缸的动力,让上方的箱体在浮动状态下,由定位销进行引导堆叠,克服传统上的计算偏差问题,进而极大的提升了箱体堆叠的可靠性。
59.虽然以上描述了本实用新型的具体实施方式,但是熟悉本技术领域的技术人员应
当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本实用新型的范围的限定,熟悉本领域的技术人员在依照本实用新型的精神所作的等效的修饰以及变化,都应当涵盖在本实用新型的权利要求所保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。