1.本实用新型涉及汽车生产技术领域,具体涉及一种前端总成自动装配设备。
背景技术:
2.目前,前端总成装配采用的是气动机械手,如图1所示,包括轨道系统100、机械臂200和抓手部300。由两名操作者手动抓取前端总成,完成前端总成在车身上的装配。一方面,使用人工装配,投入人员成本大,并且针对不同的定位rps孔(定位基准孔)y向间距不同,气动机械手需要增加额外的气缸,并入不同定位尺寸的车型有限,改造量大。另一方面,无法对车身质量状态及装配质量状态无法监控。
3.鉴于上述问题,本实用新型创作者经过长时间的研究和实践终于获得了本实用新型。
技术实现要素:
4.本实用新型旨在至少解决现有技术中存在的技术问题之一,为此,本实用新型提供一种前端总成自动装配设备,对并入车型定位尺寸没有限制,并极大的降低了人员成本。
5.本实用新型采用的技术方案在于:
6.提供一种前端总成自动装配设备,包括机器人和抓手,所述抓手安装在所述机器人的手臂工作端;所述抓手包括连接部、框架、伺服电机和两个爪臂,所述连接部与所述机器人的手臂工作端相连接,所述框架与所述连接部固定连接,所述的两个爪臂固定在所述框架上,每个爪臂上连接有一个定位销,所述伺服电机固定在所述框架上;
7.所述定位销用于与前端总成前杠骨架上的定位孔相配合,所述伺服电机的输出端与至少一个定位销相连接,进而能够驱动该定位销在所述爪臂上滑动。
8.根据本实用新型的一些实施例,至少一个爪臂上形成有滑轨,该爪臂上的定位销的一端固定有滑块,所述滑块能够沿所述滑轨进行滑动。
9.根据本实用新型的一些实施例,所述的两个爪臂上均形成有滑轨,所述的两个定位销的一端均固定有滑块,所述滑块能够沿所述滑轨进行滑动;所述伺服电机的输出端通过传动机构与两个定位销相连接,进而能够驱动两个定位销在所述爪臂上同步反向滑动。
10.根据本实用新型的一些实施例,所述爪臂上设有相机。
11.根据本实用新型的一些实施例,所述爪臂上设有支撑部,用于支撑前杠骨架的前面板。
12.根据本实用新型的一些实施例,装配设备还包括电机控制器,与所述伺服电机相连接。
13.与现有技术比较本实用新型的有益效果在于:
14.本实用新型的前端总成自动装配设备对定位销增加伺服机构,调整不同y向定位尺寸,适应不同车型不同的定位尺寸要求。同时可以监控车身及装配质量状态。
附图说明
15.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1示出了现有前端总成装配机械手的结构示意图;
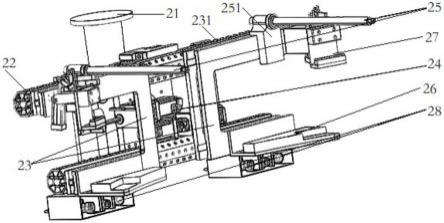
17.图2示出了本实用新型的实施方式的前端总成自动装配设备的工作状态示意图;
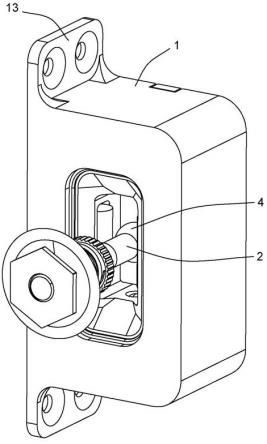
18.图3示出了本实用新型的实施方式的抓手的工作状态示意图;
19.图4示出了本实用新型的实施方式的抓手的结构示意图;
20.图5示出了前端总成的前杠骨架的结构示意图。
具体实施方式
21.以下结合附图,对本实用新型上述的和另外的技术特征和优点作更详细的说明。
22.在本实用新型的描述中,需要理解的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
23.如图2所示,在本实施例中,前端总成自动装配设备,包括机器人1和抓手2,抓手2安装在机器人1的手臂工作端。装配过程为:前端总成4放置在前端输送吊具3上,机器人1从吊具3上抓取前端总成4,移动到车身5前,将前端总成4装配到车身5上。机器人1可选用现有的成品机器人,如kuka机器人,自带控制系统,手臂运行轨迹可通过控制系统进行编辑,当然也可通过手动操控或人工示教等方式进行操作。
24.如图3~5所示,抓手2包括连接部21、框架22、伺服电机24和两个爪臂23,连接部21与机器人1的手臂工作端相连接,框架22与连接部21固定连接,两个爪臂23固定在框架22上,每个爪臂23上连接有一个定位销25,伺服电机24固定在框架22上。定位销25用于与前端总成4的前杠骨架6上的定位孔61、62相配合,伺服电机24的输出端与其中一个定位销25相连接,进而能够驱动该定位销25在对应的爪臂23上滑动。具体的,爪臂上形成有滑轨231,爪臂上的定位销25的一端固定有滑块251,滑块231能够沿滑轨231进行滑动,进而改变位置,使其适配不同y向间距的定位孔61、62,变位伺服柔性高。
25.本领域技术人员可以理解的,伺服电机24的输出端与定位销25之间可以采用多种传动结构实现传动连接,可以根据实际情况选择,例如采用丝杠螺母副结构,伺服电机24驱动丝杠转动,滑块231作为螺母在丝杠的带动下移动。又或采用齿轮齿条结构等。
26.进一步地,前端总成自动装配设备还包括电机控制器,与伺服电机24相连接,通过电机控制器控制伺服电机24的正反转动,实现定位销25在爪臂23上的左右移动。可以理解的,该电机控制器可以集成或连接在机器人的控制系统上。
27.进一步地,爪臂上设有支撑部,用于支撑前杠骨架的前面板。在一具体的示例中,支撑部包括上支撑部27和下支撑部26,所述上支撑部27用于在抓取前端总成4时支撑前杠骨架6的上前面板63,所述下支撑部26用于在抓取前端总成4时支撑前杠骨架6的下前面板
64。
28.在另一实施例中,两个爪臂23上均形成有滑轨231,两个定位销25的一端均固定有滑块251,滑块251能够沿滑轨231进行滑动。伺服电机24的输出端通过传动机构与两个定位销25相连接,进而能够驱动两个定位销25分别在两个爪臂23上同步反向滑动。该传动机构可以根据实际情况选择,参考上一实施例中的描述,在此不在赘述。两个定位销25同时运动,利于抓手抓取前端总成4时的稳定。
29.在另一实施例中,爪臂23上设有相机28,可以对车身质量状态及装配质量状态进行监控。本领域技术人员可以理解的,相机28可以作为视觉系统的一部分,与机器人的控制系统连接,可以在机器人控制屏上对车身质量状态及装配质量状态进行显示监控,还可以通过视觉引导机器人1的动作轨迹。本领域技术人员可知,视觉引导为本领域成熟技术手段,视觉引导定位精度高,柔性高,高度自动化。
30.以上仅为本实用新型的较佳实施例,对本实用新型而言仅仅是说明性的,而非限制性的。本实用新型中各部件的结构和连接方式等都是可以有所变化的,凡是在本实用新型技术方案的基础上进行的等同变换和改进,均不应排除在本实用新型的保护范围之外。
技术特征:
1.一种前端总成自动装配设备,其特征在于,包括机器人和抓手,所述抓手安装在所述机器人的手臂工作端;所述抓手包括连接部、框架、伺服电机和两个爪臂,所述连接部与所述机器人的手臂工作端相连接,所述框架与所述连接部固定连接,所述的两个爪臂固定在所述框架上,每个爪臂上连接有一个定位销,所述伺服电机固定在所述框架上;所述定位销用于与前端总成前杠骨架上的定位孔相配合,所述伺服电机的输出端与至少一个定位销相连接,进而能够驱动该定位销在所述爪臂上滑动。2.如权利要求1所述的一种前端总成自动装配设备,其特征在于,至少一个爪臂上形成有滑轨,该爪臂上的定位销的一端固定有滑块,所述滑块能够沿所述滑轨进行滑动。3.如权利要求1所述的一种前端总成自动装配设备,其特征在于,所述的两个爪臂上均形成有滑轨,所述的两个定位销的一端均固定有滑块,所述滑块能够沿所述滑轨进行滑动;所述伺服电机的输出端通过传动机构与两个定位销相连接,进而能够驱动两个定位销在所述爪臂上同步反向滑动。4.如权利要求1所述的一种前端总成自动装配设备,其特征在于,所述爪臂上设有相机。5.如权利要求1所述的一种前端总成自动装配设备,其特征在于,所述爪臂上设有支撑部,用于支撑前杠骨架的前面板。6.如权利要求1所述的一种前端总成自动装配设备,其特征在于,还包括电机控制器,与所述伺服电机相连接。
技术总结
本实用新型涉及汽车生产技术领域,提供一种前端总成自动装配设备,包括机器人和抓手,抓手安装在机器人的手臂工作端。抓手包括连接部、框架、伺服电机和两个爪臂,连接部与机器人的手臂工作端相连接,框架与连接部固定连接,两个爪臂固定在框架上,每个爪臂上连接有一个定位销,伺服电机固定在框架上。定位销用于与前端总成前杠骨架上的定位孔相配合,伺服电机的输出端与至少一个定位销相连接,进而能够驱动该定位销在爪臂上滑动。本实用新型的前端总成自动装配设备对定位销增加伺服机构,调整不同Y向定位尺寸,适应不同车型不同的定位尺寸要求。要求。要求。
技术研发人员:叶庆雨 朱海洋 孙治国
受保护的技术使用者:一汽-大众汽车有限公司
技术研发日:2022.08.08
技术公布日:2023/1/3
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。