引线键合机的bto自动调整系统及方法
技术领域
1.本发明涉及引线键合机技术领域,尤其涉及引线键合机的bto自动调整系统及方法。
背景技术:
2.全自动引线键合机是利用超声波,热和压力将金属丝电气连接半导体芯片和管脚的一种设备。它利用换能器和瓷嘴,将超声振动施加在键合点上,在与金属丝接触的芯片或管脚上面形成溶合,从而实现牢固的电气连接。第一焊点是球焊,即利用高压电子打火,将金属丝头部烧成一个小球,这样可以增加键合的强度,一般第一焊点键合在器件的芯片上。第二焊点一般为楔形焊,即通过瓷嘴与框架的摩擦,在超声波能量作用下达到金属丝与焊点的可靠联接。
3.对每一个键合点,设备都需要用机器视觉识别系统去进行位置的识别和计算确定。由于超声波换能器和瓷嘴挡住了键合点,需要将视觉识别光路移到旁边无阻挡的地方来识别键合位置。识别完位置后,瓷嘴再移动到这个位置进行键合。瓷嘴与光路识别的距离称为焊点偏置距离(bond tip offset,简称bto)。
4.对每一个芯片上的键合点来讲,视觉识别系统都会移动到键合点上方进行识别以确认实际位置的坐标。如果芯片上键合点比较多,视觉识别定位的所需的时间就会比较多,影响生产效率。为此,针对料条上每个芯片的跨距,事先手动调节bto的距离,这往往是x向距离,使其与芯片跨距相等,这样,在对某一点进行键合时,下一点的键合位置也得到了视觉识别系统的确定,大大节省了位置视觉识别的时间。这种方法称作视觉识别预看(pr look ahead)。但是对于高精度定位,视觉范围比较小的bto调节,很容易超出范围找不到调节方向,手动调节bto需要大量的时间。固定键合一种器件还容易接受,但由于封装厂经常需要更换不同的料条和芯片,从一种器件转换到另一种器件,用视觉识别预看功能就需要花费较多的时间来调节bto。
技术实现要素:
5.本发明所要解决的技术问题在于克服上述问题,而提出了一种引线键合机的bto自动调整系统及方法,能够充分发挥视觉识别预看方法的优势,并快速精准实现视觉识别预看距离的自动设置,并以此实现不同器件料条更换后的bto自动调整。
6.本发明的技术方案为:一种引线键合机的bto自动调整系统,所述引线键合机包括用于承载料条的键合区域、设有瓷嘴和视觉识别系统的键合头、xy运动平台,键合头安装在xy运动平台上,使键合头受xy运动平台的驱动而具有x向和y向的运动行程,所述bto自动调整系统包括:限位组件,用于限制视觉识别系统的x向位置;锁止组件,用于锁止或解除锁止视觉识别系统相对键合头的x向运动;控制单元,与限位组件和xy运动平台相连,用于控制锁止组件锁止或解除锁止状
态的切换以及计算更换前后不同料条的bto差值,以此控制xy运动平台带动键合头运动。
7.进一步地,本发明所述的引线键合机的bto自动调整系统中,所述锁止组件包括设置在键合头上的电磁铁、位于电磁铁上方的铁片和连接在电磁铁与铁片之间的限位压簧,所述电磁铁与控制单元电性连接;所述电磁铁不通电时,限位压簧向上抵推铁片致使铁片与视觉识别系统形成摩擦接触而锁止;所述电磁铁通电时,吸合铁片,致使铁片脱离视觉识别系统而解除锁止。
8.进一步地,本发明所述的引线键合机的bto自动调整系统中,所述限位组件包括阻挡件和弹性抵推件,所述阻挡件设置在xy运动平台的固定端上,与视觉识别系统x向一侧相抵触,所述弹性抵推件安装在键合头上并弹性抵接视觉识别系统x向另一侧。
9.进一步地,本发明所述的引线键合机的bto自动调整系统中,所述阻挡件采用可移动设置的,可移入或移出键合头的运动行程范围。
10.进一步地,本发明所述的引线键合机的bto自动调整系统中,所述阻挡件通过一z向转轴可转动设置在xy运动平台的固定端上,所述限位组件还包括有用于限制阻挡件转动角度范围的第一限位部和第二限位部,当所述阻挡件与第一限位部止挡配合时,阻挡件处于键合头的运动行程范围内,当阻挡件与第二限位部止挡配合时,阻挡件处于键合头的运动行程范围外;所述控制单元连接z向转轴以控制其旋转。
11.进一步地,本发明所述的引线键合机的bto自动调整系统中,所述视觉识别系统与键合头之间设有导向组件,用于引导视觉识别系统相对键合头x向滑移,所述导向组件包括至少一对x向滑槽和x向滑轨,分别相对设于视觉识别系统与键合头的接触面上,形成x向滑移配合。
12.本发明还提出了一种上述引线键合机的bto自动调整系统的bto调整方法,包括如下步骤:步骤1、控制单元将bto理论值设定为同一料条上沿x向排列的芯片的x向间距,分别获取更换前后不同料条对应的第一bto理论值、第二bto理论值,并计算两者的bto差值;步骤2、控制单元控制xy运动平台运动,带动键合头和视觉识别系统沿x向滑移,限位组件限制视觉识别系统的x向位置;步骤3、控制单元控制锁止组件解除其锁止状态,使键合头与视觉识别系统可相对x向运动;步骤4、控制单元将上述bto差值作为x向调整距离,以此控制xy运动平台带动键合头和瓷嘴x向移动相同的距离,使瓷嘴与视觉识别系统的x向距离改变,调整为第二bto理论值;步骤5、控制单元控制锁止组件切换至锁止状态,使视觉识别系统与瓷嘴的相对位置固定,完成bto调整。
13.进一步地,所述限位组件包括阻挡件和弹性抵推件,阻挡件设置在xy运动平台的固定端上,与视觉识别系统x向一侧相抵触,所述弹性抵推件安装在键合头上并弹性抵接视觉识别系统x向另一侧;所述步骤2中限位组件限制视觉识别系统的x向位置包括:视觉识别系统运动至x向一侧与阻挡件抵触,另一侧受弹性抵推件弹性抵推。
14.进一步地,所述阻挡件通过一z向转轴可转动设置在xy运动平台的固定端上,所述控制单元连接z向转轴以控制其旋转,所述限位组件还包括有用于限制阻挡件转动角度范
围的第一限位部和第二限位部;所述步骤2还包括:在控制单元在控制xy运动平台前,控制单元控制z向转轴带动阻挡件旋转至与第一限位部止挡配合,阻挡件移入键合头的运动行程范围内;所述步骤5还包括:在完成bto调整后,控制单元控制z向转轴带动阻挡件旋转至与第二限位部止挡配合,阻挡件移出键合头的运动行程范围。
15.进一步地,所述锁止组件包括设置在键合头上的电磁铁、位于电磁铁上方的铁片和连接在电磁铁与铁片之间的限位压簧,所述电磁铁与控制单元电性连接;步骤3中,控制单元控制锁止组件解除其锁止状态的步骤包括:控制单元控制电磁铁通电,电磁铁吸合铁片致使铁片脱离视觉识别系统而解除锁止;步骤5中,控制单元控制锁止组件切换至锁止状态的步骤包括:控制单元控制电磁铁不通电,限位压簧向上抵推铁片致使铁片与视觉识别系统形成摩擦接触而锁止。
16.本发明的有益效果是:1、本发明结构简单,设计合理,可广泛应用于具有多个芯片键合点的料条,充分发挥视觉识别预看距离方法的优势,利用同一料条上芯片的x向跨距作为bto值,仅进行x向调整、y向不变,且达到同一料条n个芯片仅定位调整一次的目的,克服传统方式需n次定位调整的缺陷,调整方式更为简单,并且通过控制单元与限位组件、阻挡件、弹性抵推件等各个结构之间的协同配合、自动化控制,能够快速精准实现不同料条更换后的bto自动调整,无需人工调整,显著缩短调整时间,提高调整效率和精度,能够充分满足高精度定位调整的需求。
17.2、本发明结构紧凑小巧,仅需在键合头局部增加限位组件、阻挡件、弹性抵推件等较小组件,并依托现有的xy平台实现,基本不增加设备空间体积;其中阻挡件采用可移动结构,能够在调整时移入键合头的运动行程范围,正常键合时移出,不会影响和干涉键合头的正常工作。
附图说明
18.图1为本发明的引线键合机的结构示意图一。
19.图2为本发明的引线键合机的结构示意图二。
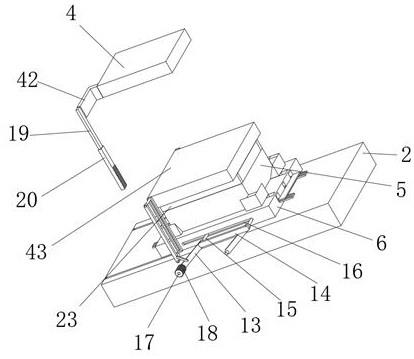
20.图3为图2圆圈处的放大示意图。
21.图4为阻挡件部分的结构示意图。
具体实施方式
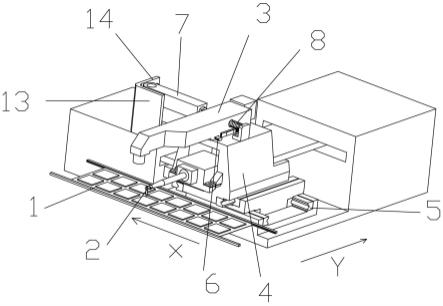
22.现结合附图对本发明作进一步的说明:参照图1和图2,本实施例公开了一种引线键合机的bto自动调整系统,所述引线键合机包括用于承载料条1的键合区域、设有瓷嘴2和视觉识别系统3的键合头4、xy运动平台5,键合头4安装在xy运动平台5上,使键合头4受xy运动平台5的驱动而具有x向和y向的运动行程。
23.所述bto自动调整系统包括:限位组件,用于限制视觉识别系统3的x向位置;锁止组件,用于锁止或解除锁止视觉识别系统3相对键合头4的x向运动;控制单元,与限位组件和xy运动平台5相连,用于控制锁止组件锁止或解除锁止状
态的切换以及计算更换前后不同料条1的bto差值,以此控制xy运动平台5带动键合头4运动,图中未具体示出控制单元。
24.具体的,所述限位组件包括阻挡件7和弹性抵推件8,所述阻挡件7设置在xy运动平台5的固定端上,与视觉识别系统3的x向一侧相抵触,所述弹性抵推件8安装在键合头4上并弹性抵接视觉识别系统3的x向另一侧。其中本实施例中,所述弹性抵推件8为推力压簧。
25.参照图1和图4,本实施例中,所述阻挡件7采用可移动设置的,可移入或移出键合头4的运动行程范围。具体的,所述阻挡件7通过一z向转轴12可转动设置在xy运动平台5的固定端上,所述限位组件还包括有用于限制阻挡件7转动角度范围的第一限位部13和第二限位部14,当所述阻挡件7与第一限位部13止挡配合时,阻挡件7处于键合头4的运动行程范围内,当阻挡件7与第二限位部14止挡配合时,阻挡件7移出键合头4的运动行程范围;所述控制单元连接z向转轴12以控制其旋转。
26.结合图3,所述锁止组件包括设置在键合头4上的电磁铁9、位于电磁铁9上方的铁片10和连接在电磁铁9与铁片10之间的限位压簧11,所述电磁铁9与控制单元电性连接;所述电磁铁9不通电时,限位压簧11向上抵推铁片10致使铁片10与视觉识别系统3形成摩擦接触而限位;所述电磁铁9通电时,吸合铁片10,致使铁片10脱离视觉识别系统3而解除限位。
27.所述视觉识别系统3与键合头4之间设有导向组件,用于引导视觉识别系统3相对键合头4进行x向滑移;所述导向组件6为至少一对x向滑槽6-1和x向滑轨6-2,分别相对设于视觉识别系统3与键合头4的接触面上,形成x向滑移配合。
28.本实施例还公开了一种引线键合机的bto自动调整系统的bto调整方法,包括如下步骤:步骤1、控制单元将bto理论值设定为同一料条1上沿x向排列的芯片的x向间距,分别获取更换前后不同料条1对应的第一bto理论值、第二bto理论值,并计算两者的bto差值;步骤2、控制单元控制z向转轴12带动阻挡件7旋转至与第一限位部13止挡配合,阻挡件7移入键合头4的运动行程范围内;控制单元控制xy运动平台5运动,带动键合头4和视觉识别系统3沿x向滑移,限位组件限制视觉识别系统3的x向位置;具体的,视觉识别系统3运动至x向一侧与阻挡件7抵触,另一侧受弹性抵推件8弹性抵推,从而使视觉识别系统3x向受限而固定不动;步骤3、控制单元控制锁止组件解除其锁止状态,使键合头4与视觉识别系统3可相对x向运动;其中解除锁止状态的步骤为:控制单元控制电磁铁9通电,吸合铁片10,致使铁片10脱离视觉识别系统3而解除锁止;步骤4、控制单元将上述bto差值作为x向调整距离,以此控制xy运动平台5带动键合头4和瓷嘴2沿x向移动相同的距离,使瓷嘴2与视觉识别系统3的x向距离改变,调整为第二bto理论值;步骤5、控制单元控制锁止组件切换至锁止状态,使视觉识别系统3与瓷嘴2的相对位置固定,完成bto调整;控制单元控制z向转轴12带动阻挡件7旋转至与第二限位部14止挡配合,阻挡件7移出键合头4的运动行程范围;其中切换至锁止状态的步骤是:控制单元控制电磁铁9不通电,限位压簧11向上抵推铁片10致使铁片10与视觉识别系统3形成摩擦接触而锁止。
29.本发明的原理在于:基于视觉识别预看(pr look ahead)方法,针对料条1上每个
芯片的跨距对其bto值进行预设,因此,对于正在进行键合的料条1,第一bto理论值是已知的,换成一种新的料条1后,芯片上键合点的理论距离也是已知的,即第二bto理论值也是已知的,二者的差值就是视觉识别系统3需要运动调整的距离。由于视觉识别有一定的宽容度,自动调整bto值就成为可能。
30.本文中所描述的具体实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,但凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。