1.本实用新型涉及医疗器械领域,尤其是一种用于医生控制台的显示装置。
背景技术:
2.微创手术因其具有手术精度高、创伤小、术后恢复快等优点,日益受到医疗领域的重视。医生控制台供医生在进行微创手术时操作遥控端的各类医疗器械,显示装置为该医生控制台上的重要设备,其包括显示器与一对布置于显示器上且可供医生观察内窥镜所采集到的视觉信息的目镜。然而,传统的显示装置无法调整显示器相对竖直平面所呈的角度,所有医生都只能让头部俯仰成一固定角度来观察目镜。因而,传统的显示装置对不同身高或观察习惯的医生适配性不高,这在一定程度上降低了医生进行微创手术时的舒适度。
3.专利号为cn202022031227.6的中国实用新型专利公开了一种观测组件、显示器、医生控制台和手术机器人系统。其技术方案提供了一种可移动的观测组件,该观测组件与水平面之间呈35
°‑
80
°
之间的一固定角度,故而不同身高或习惯的医生在使用观测组件时,只能通过调整观测组件的位置调整头部俯仰的角度,其可调整的角度范围较为有限。
技术实现要素:
4.针对上述的传统显示装置所存在的缺陷,本实用新型的目的是提供一种新型的用于医生控制台的显示装置。
5.为了达到上述的目的,本实用新型提供一下技术方案:一种用于医生控制台的显示装置,包括:显示器,包括壳体与固定设置于所述壳体上且供医生观察的一对目镜;摆动支撑机构,包括支撑柱以及上下布置的第一连接杆和第二连接杆,所述的第一连接杆具有相互远离且分别可转动地连接所述支撑柱与所述壳体的第一端部与第二端部,所述的第二连接杆具有相互远离且分别可转动地连接所述支撑柱与所述壳体的第三端部与第四端部,所述第一连接杆、第二连接杆、壳体以及支撑柱所形成的四个转动连接点相互区别;驱动机构,与所述的第三端部配合并配置为驱动所述的第一连接杆摆动。
6.在上述的技术方案中,优选地,所述的驱动机构包括驱动电机、与所述驱动电机传动连接的蜗杆以及与所述蜗杆啮合且固定设置于所述第三端部上的蜗轮,所述的驱动电机与所述的蜗杆均布置于所述支撑柱的内部,所述的驱动电机被配置成能够驱动所述的蜗杆周向转动,以摆动所述的第一连接杆与所述的显示器。
7.在上述的优选方案中,进一步优选地,所述的驱动机构还包括位于所述驱动电机与所述蜗杆之间的减速器,所述的减速器包括机械耦接所述驱动电机的动力端与机械耦接所述蜗杆的负荷端。
8.在上述的优选方案中,进一步优选地,所述的驱动机构还包括上下布置且固定设置于所述支撑柱内的一对转动轴承,所述蜗杆的上下两端部分别固定支撑于一对所述转动轴承的内圈上。
9.在上述的优选方案中,进一步优选地,所述的蜗轮为一不完全蜗轮。
10.在上述的技术方案中,优选地,所述的摆动支撑机构还包括固定设置于所述壳体后部且上下布置的第一铰接座与第二铰接座,所述的第二端部可转动地连接于所述的第一铰接座,所述的第四端部可转动地连接所述的第二铰接座。
11.在上述的优选方案中,进一步优选地,所述第一铰接座的长度大于所述第二铰接座的长度。
12.在上述的优选方案中,进一步优选地,所述壳体的后部限定有一纵向延伸的凹槽,所述的第一铰接座与所述的第二铰接座均布置于所述的凹槽处。
13.在上述的优选方案中,进一步优选地,所述的第一连接杆与所述的第二连接杆、第一铰接座、及第二铰接座共面设置。
14.在上述的技术方案中,优选地,所述第一端部与所述第三端部的间距大于所述第二端部与所述第四端部的间距。
15.本实用新型所提供技术方案所提供的显示装置,带有一对目镜的显示器通过第一、第二连接杆可转动地支撑于支撑柱上。该显示装置可通过驱动电机与第一连接连接杆带动显示器摆动,从而调节目镜位置,以适配不同身高或观察习惯的医生。
附图说明
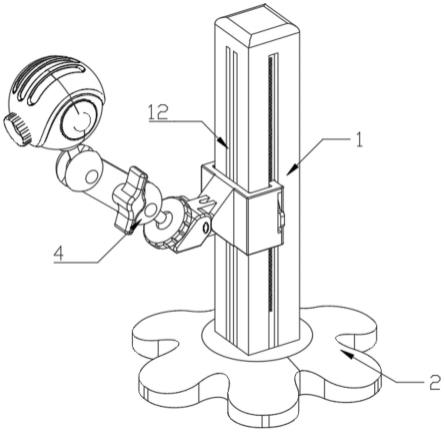
16.图1为本实用新型所提供的显示装置的立体结构示意图;
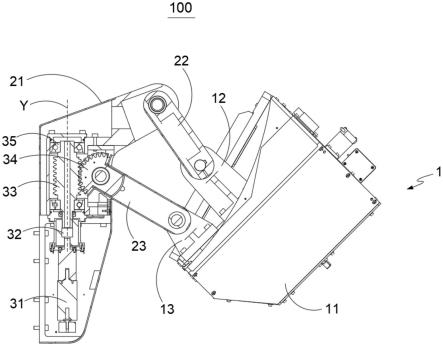
17.图2为图1所示的显示装置的侧面半剖图;
18.图3为图1所示显示装置所构成的四连杆机构的线性结构示意图;
19.图4为本实用新型所提供的绘图方法的示例图。
20.图中标注:
21.100、显示装置;
22.1、显示器;11、壳体;12、第一铰接座;13、第二铰接座;14、目镜; 21、支撑柱;22、第一连接杆;23、第二连接杆;
23.31、驱动电机;32、减速器;33、蜗杆;34、蜗轮;35、转动轴承。
具体实施方式
24.为详细说明实用新型的技术内容、构造特征、所达成目的及功效,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。在下面的描述中,出于解释的目的,阐述了许多具体细节以提供对实用新型的各种示例性实施例或实施模式的详细说明。然而,各种示例性实施例也可以在没有这些具体细节或者在一个或更多个等同布置的情况下实施。此外,各种示例性实施例可以不同,但不必是排他的。例如,在不脱离实用新型构思的情况下,可以在另一示例性实施例中使用或实现示例性实施例的具体形状、构造和特性。
25.此外,本技术中,诸如“在
……
之下”、“在
……
下方”、“在
……
下”、“下”、“在
……
上方”、“上”、“在
……
之上”、“较高的”、“侧”(例如,如在“侧壁”中)等的空间相对术语,由此来描述如附图中示出的一个元件与另一(其它)元件的关系。空间相对术语意图包括设备在使用、操作和/或制造中除了附图中描绘的方位之外的不同方位。例如,如果附图中的设备被翻转,则被描述为“在”其它元件或特征“下方”或“之下”的元件随后将被定位为“在”所述其
它元件或特征“上方”。因此,示例性术语“在
……
下方”可以包括上方和下方两种方位。此外,设备可以被另外定位(例如,旋转90度或者在其它方位处),如此,相应地解释在此使用的空间相对描述语。
26.图1-2示出了本实用新型所提供的一种用于医生控制台的显示装置100,其供医生在微创手术时观察内窥镜(图中未示出)所采集的视觉信息。如图所示,该显示装置100包括显示器1、用于支撑显示器1的摆动支撑机构以及用于驱动显示器1摆动的驱动机构。
27.显示器1包括形成外轮廓的壳体11与从显示器1前部对外露出的一对目镜14。摆动支撑机构包括安装于一升降座(图中未标示出)上的支撑柱21、上下布置的第一连接杆22与第二连接杆23以及固定设置于壳体11后部的第一铰接座12与第二铰接座13。支撑柱21具有竖直延伸的直立段(图中为标示出)与邻接直立段上侧且向前向上延伸的倾斜段(图中未标示出)。壳体11的后中部向内凹陷并形成一纵向延伸的凹槽(图中未标示出),第一、第二铰接座上下布置于该凹槽处,以减小显示器1的整体尺寸。一对目镜14固定设置于壳体11上,其供医生观察内窥镜所采集的视觉信息。
28.第一连接杆22具有相互远离的第一端部与第二端部,其第一端部可转动地铰接于支撑柱21的倾斜段上,其第二端部可转动地连接于第一铰接座12上;第二连接杆23具有相互远离的第三端部与第四端部,其第三端部可转动地连接于支撑柱21的直立段上,其第四端部可转动地连接于第二铰接座13上。第一、第二连接杆、壳体11以及支撑柱21所形成的四个转动连接点相互区别,即无重合的转动连接点。
29.进一步地,第一、第二连接杆共面设置且第一、第三端部的间距大于第二、第四端部的间距,以扩大显示器1的可调角度范围;第一铰接座12的长度大于第二铰接座13的长度,以避免第一、第二连接杆相互干涩。
30.结合图3,支撑柱21、第一、第二连接杆以及显示器1构成了一四连杆传动机构。支撑柱21为该四连杆机构中固定不动的机架;第一连接杆22为该四连杆机构输出动力的主动连架杆(详见下文);第二连接杆23为该四连杆机构的被动连架杆;显示器1即为该四连杆机构的连杆,通过驱动该第一连接杆22转动,即可带动显示器1沿着特定的路径移动。其中,图中a点表示一对目镜14所在位置,平面a表示一对目镜14所在的平面。
31.在实际应用时,显示器1需被配置成可绕目镜14转动,以适配不同身高或观察习惯的医生。但由于四连杆机构中的连杆不能够绕一点转动,考虑到支撑柱21安装于一升降座上,即显示器1高度可调节。因而,可将该四连杆机构构造成连杆(即显示器1)在移动时,可调整平面a与竖直平面所呈的角度(该角度即医生观察一对目镜14时的俯仰角度)且点a在横向上产生的位移较小,其后再通过升降台补偿点a的纵向位移,即可达到显示器1近似绕点a转动的效果。
32.结合图4,本实用新型提供一种用于确定第一、第二连接杆长度,以达到上述效果的绘图方法。以下以平面a能够与竖直平面呈15
°
—45
°
中任一角度、点a的横向位于不大于5mm且纵向位移不大于20mm为例,进行说明。具体地,该绘图方法包括如下步骤:
33.分别做出平面a与竖直平面层15
°
角度与45
°
角度时,显示器1的线性结构图;其中,点a与点a’分别为平面a与竖直平面呈15
°
和45
°
时,目镜14的位置,点a’相对点a具有5mm的横向位移与20mm的纵向位移;
34.连接点b与点b’,并作线段bb’的垂直平分线l1,连接点c与点c’,并做出线段cc’的
垂直平分线l2;其中,点b和b’分别为平面a与竖直平面呈15
°
和45
°
时,第一铰接座12与第一连接杆22的铰接点位置;点c和c’分别为平面a与竖直平面呈15
°
和45
°
时,第二铰接座13与第二连接杆23的铰接点位置;
35.提供一个目镜14与支撑柱21的最远距离d(该距离由工作人员视实际设备需求决定),在射线l2上获取d点,该d点即第二连接杆23与支撑柱21的铰接点,由线段dc(或dc’)的长度即可确定第二连接杆23的杆长;
36.提供一个第一连接杆22距离死点的最小角度(该由工作人员视实际设备需求决定,本实施例以15
°
为例),获取死点位置f点,以f点为圆心,线段dc(或dc’)的长度为半径作出圆f;
37.作出一与圆f相切且圆心位于射线l1上的圆g,获取该圆g的圆心g点,g点即为第一连接杆22与支撑柱21的铰接点,继而通过线段gb(或gb’)的长度,即可确定第一连接杆22的杆长。
38.通过上述的绘图方法,即可确定该四连杆机构中各个交接点的位置,继而确定第一、第二连接杆的杆长以及第一、第二连接杆与支撑柱21的铰接位置。通过上述确定后的第一、第二连接杆的杆长以及各铰接位置,即可达到显示器1在摆动时,近似地绕一对目镜14转动的效果。
39.继续参阅图2,驱动机构包括提供动力的驱动电机31、与驱动电机31传动链接的蜗杆33、位于驱动电机31与蜗杆33之间的减速器32以及与该蜗杆32相啮合的蜗轮34。
40.驱动电机31、减速器32以及蜗杆33沿着从下至上地依次布置于支撑柱21的内部。减速器32具有机械耦合驱动电机31电机轴(图中未标示出)的动力端以及机械耦合蜗杆33的负荷端,蜗杆33限定有一竖直延伸的轴心线y并被配置成能够在驱动电机31的带动下绕着该轴心线y转动。进一步地,驱动机构还包括上下布置且固定设置于支撑柱21内部的一对转动轴承35,蜗杆33的上下两个端部分别固定支撑与一对转动轴承35的内圈上,以防止蜗杆33的轴心线y发生偏移。
41.蜗轮34固定设置于第二连接杆23的第三端部上,以使得蜗杆33可带动第二连接杆23转动。进一步地,蜗轮34为一不完全蜗轮,以缩小支撑柱21的尺寸。可以理解地,该蜗轮34的最小可转动角度应能够满足显示器1所需的可调整角度。本实用新型所提供的显示装置100采用具有自锁特性的蜗轮蜗杆传动连接,可以使得该显示装置100更加可靠,不容易出现驱动电机31断电后,显示器1在重力作用下掉落的情况。
42.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,本实用新型要求保护范围由所附的权利要求书、说明书及其等效物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。