1.本实用新型涉及机器人技术领域,具体涉及一种机器人的头部组件和机器人。
背景技术:
2.机器人一般包括躯身组件、腿组件和头部组件。相关技术中,对于人形机器人这类机器人来说,头部组件存在功能单一,人机交互性差的缺陷。
技术实现要素:
3.本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。
4.为此,本实用新型的实施例提出一种机器人的头部组件,该机器人的头部组件具有人机交互性好的优点。
5.本实用新型的实施例还提出一种机器人。
6.根据本实用新型实施例的机器人的头部组件包括本体和显示模块,所述显示模块安装于所述本体,所述显示模块包括构成面部区域的柔性屏。
7.根据本实用新型实施例的机器人的头部组件,柔性屏构成的面部区域能够通过柔性屏的显示功能实现与人的交互,如柔性屏根据场景显示出面部表情变化,或者柔性屏显示出机器人的功能、状态等信息,由此机器人的头部组件的功能性强,人机交互性好。
8.在一些实施例中,所述显示模块还包括显示支架,所述显示支架具有弧形支撑面,所述柔性屏的内表面与所述弧形支撑面贴合接触。
9.在一些实施例中,所述机器人的头部组件还包括语音交互模块,所述语音交互模块安装于所述本体内。
10.在一些实施例中,所述语音交互模块包括扬声器,所述本体包括构成耳部区域的耳壳,所述耳壳上设有多个透声孔。
11.在一些实施例中,所述本体包括头部面壳和安装于所述头部面壳内的第一支架,所述显示模块安装于所述第一支架。
12.在一些实施例中,所述头部面壳由透明材质制成,所述柔性屏位于所述头部面壳内,所述柔性屏朝向所述头部面壳。
13.在一些实施例中,所述本体还包括底座和驱动装置,所述底座与所述第一支架可枢转地相连,所述驱动装置安装于所述底座,所述驱动装置与所述第一支架传动相连。
14.在一些实施例中,所述驱动装置包括舵机、轴承、第一齿轮和第二齿轮,所述舵机安装于所述底座;所述轴承的内圈和外圈中的一者与所述第一支架相连,所述内圈和所述外圈中的另一者与所述底座相连;所述第一齿轮与所述舵机的驱动轴同轴相连;所述第二齿轮与所述内圈和所述外圈中的所述一者同轴相连,所述第二齿轮与所述第一齿轮啮合。
15.在一些实施例中,所述底座上设有长孔,所述舵机配合在所述长孔内,所述舵机沿所述长孔的长度方向可移动以便于所述第一齿轮靠近和远离所述第二齿轮。
16.在一些实施例中,所述驱动装置还包括第二支架和第三支架,所述第二支架通过
螺纹件连接所述内圈和所述底座;所述第三支架通过螺纹件连接所述外圈、所述第二齿轮和所述第一支架。
17.在一些实施例中,所述本体还包括脖子外壳,所述脖子外壳与所述头部面壳相连,所述脖子外壳的外表面与所述头部面壳的外表面光滑衔接。
18.在一些实施例中,所述本体还包括围脖外壳,所述围脖外壳与所述底座相连,所述围脖外壳的外表面与所述脖子外壳的外表面光滑衔接。
19.根据本实用新型的实施例的机器人包括躯身组件、与所述躯身组件相连的腿组件和与所述躯身组件相连的头部组件,所述头部组件为如上述任一实施例所述的机器人的头部组件。
20.根据本实用新型实施例的机器人所具有的技术优势与上述机器人的头部组件的技术优势相同,此处不再赘述。
附图说明
21.图1是根据本实用新型实施例的机器人的头部组件的正视图。
22.图2是根据本实用新型实施例的机器人的头部组件的左视图。
23.图3是根据本实用新型实施例的机器人的头部组件的右视图。
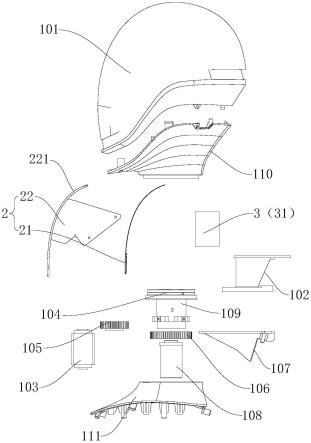
24.图4是根据本实用新型实施例的机器人的头部组件的爆炸图。
25.图5是根据本实用新型实施例的机器人的头部组件的部分示意图。
26.附图标记:
27.100、机器人的头部组件;1、本体;101、头部面壳;102、第一支架;103、舵机;104、轴承;105、第一齿轮;106、第二齿轮;107、底座;108、第二支架;109、第三支架;110、脖子外壳;111、围脖外壳;112、耳壳;2、显示模块;21、柔性屏;22、显示支架;221、弧形支撑面;3、语音交互模块;31、扬声器。
具体实施方式
28.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
29.下面结合图1-图5描述根据本实用新型实施例的机器人的头部组件100。
30.根据本实用新型实施例的机器人的头部组件100包括本体1和显示模块2,显示模块2安装于本体1,显示模块2包括构成面部区域的柔性屏21。
31.根据本实用新型实施例的机器人的头部组件100,柔性屏21构成的面部区域能够通过柔性屏21的显示功能实现与人的交互,如柔性屏21根据场景显示出面部表情变化,或者柔性屏21显示出机器人的功能、状态等信息,由此机器人的头部组件100的功能性强,人机交互性好。
32.在一些实施例中,显示模块2还包括显示支架22,显示支架22具有弧形支撑面221,柔性屏21的内表面与弧形支撑面221贴合接触。由此,柔性屏21与显示支架22相连后,显示支架22的弧形支撑面221用于将柔性屏21维持在一个设定的形状,以便于更稳定地实现其面部显示功能。
33.具体地,如图4和图5所示,显示支架22安装于本体1内,柔性屏21的内表面与弧形支撑面221粘接,由此实现柔性屏21与显示支架22的稳固相连。
34.在一些实施例中,如图4和图5所示,机器人的头部组件100还包括语音交互模块3,语音交互模块3安装于本体1内。由此,用户可以通过语音交互模块3实现与机器人的头部组件100的语音交互,也使得机器人的头部组件100实现听和说的功能,功能性更好。
35.在一些实施例中,语音交互模块3包括扬声器31,本体1包括构成耳部区域的耳壳112,耳壳112上设有多个透声孔。
36.透声孔的设置,既方便语音交互模块3接收用户发出的声音,也便于扬声器31发出的声音传出外界而被用户接收。
37.具体地,如图1和图3所示,本体1的外轮廓为仿人形,即模仿人的头部形状,耳壳112有两个并分别位于本体1的左右两侧的耳部区域,由此外形美观度更高。
38.在一些实施例中,本体1包括头部面壳101和安装于头部面壳101内的第一支架102,显示模块2安装于第一支架102。头部面壳101构成本体1的外轮廓,第一支架102位于头部面壳101构成的容纳腔内,与第一支架102相连的显示模块2也位于容纳腔内,由此第一支架102和显示模块2的隐蔽性好,显示模块2中柔性屏21的防护性好。
39.具体地,显示模块2中的显示支架22通过螺钉与第一支架102相连,由此实现显示模块2在本体1上的安装,显示模块2的拆装方便。
40.在一些实施例中,头部面壳101由透明材质制成,柔性屏21位于头部面壳101内,柔性屏21朝向头部面壳101。
41.由此,柔性屏21不会外露于本体1的外表面,对柔性屏21的防护效果好。而且,头部面壳101的外表面即构成本体1的外轮廓,机器人的头部组件100的外形美观度更高。
42.具体地,柔性屏21的外表面与头部面壳101的内表面间隔布置,由此有效避免头部面壳101向内弯折而损坏柔性屏21。
43.在一些实施例中,本体1还包括底座107和驱动装置,底座107与第一支架102可枢转地相连,驱动装置安装于底座107,驱动装置与第一支架102传动相连。
44.底座107用于与机器人的躯身组件相连,第一支架102相对底座107枢转,使得机器人的头部组件100相对躯身组件实现左右转动,即可在与用户交互时实现摇头的动作。由此机器人的头部组件100的功能性更强,人机交互性更好。
45.在一些实施例中,如图5所示,驱动装置包括舵机103、轴承104、第一齿轮105和第二齿轮106。舵机103安装于底座107,轴承104的内圈和外圈中的一者与第一支架102相连,内圈和外圈中的另一者与底座107相连,第一齿轮105与舵机103的驱动轴同轴相连,第二齿轮106与内圈和外圈中的一者同轴相连,第二齿轮106与第一齿轮105啮合。
46.舵机103工作以使第一齿轮105和第二齿轮106发生相对转动,随后带动轴承104的内圈和外圈相对转动,进而实现第一支架102相对底座107的枢转,实现机器人的头部组件100的摇头功能。
47.在一些实施例中,底座107上设有长孔,舵机103配合在长孔内,舵机103沿长孔的长度方向可移动以便于第一齿轮105靠近和远离第二齿轮106。
48.即舵机103可以沿长孔的长度方向滑动至任一位置,随后再通过螺钉与底座107相连,由此实现第一齿轮105和第二齿轮106之间距离的调节,保证第一齿轮105和第二齿轮
106的啮合不会过紧或过松而影响机器人的头部组件100的摇头效果。
49.在一些实施例中,驱动装置还包括第二支架108和第三支架109。第二支架108通过螺纹件连接内圈和底座107,第三支架109通过螺纹件连接外圈、第二齿轮106和第一支架102。由此实现第一支架102相对底座107转动的驱动装置的模块化设计,拆装和维修更加方便。
50.具体地,如图4和图5所示,第二支架108和第三支架109均为套筒状结构,第二支架108的上端插设在内圈内并通过螺钉相连,第二支架108的下端通过螺钉与底座107相连。第三支架109套设在第二支架108上,第三支架109的上端套设在外圈上并通过螺钉相连,第三支架109通过螺钉与第一支架102相连,第二齿轮106过盈配合在第三支架109上。
51.在一些实施例中,本体1还包括脖子外壳110,脖子外壳110与头部面壳101相连,脖子外壳110的外表面与头部面壳101的外表面光滑衔接。由此,头部面壳101和脖子外壳110构成机器人的头部组件100中除围脖外的外部轮廓,外部轮廓的外形一致性强,且将驱动装置、显示模块2和第一支架102与外界分隔开,提高了机器人的头部组件100的外形美观度。
52.具体地,脖子外壳110通过螺钉与头部面壳101相连,耳壳112位于脖子外壳110和头部面壳101之间,并均与脖子外壳110和头部面壳101光滑衔接,由此进一步提高机器人的头部组件100的外形美观度。
53.在一些实施例中,本体1还包括围脖外壳111,围脖外壳111与底座107相连,围脖外壳111的外表面与脖子外壳110的外表面光滑衔接。
54.围脖外壳111将底座107和驱动装置的部分结构与外界分隔开,隐蔽性腔,机器人的头部组件100的外形美观度更高。
55.根据本实用新型的实施例的机器人包括躯身组件、与躯身组件相连的腿组件和与躯身组件相连的头部组件,头部组件为如上述任一实施例的机器人的头部组件100。
56.根据本实用新型实施例的机器人所具有的技术优势与上述机器人的头部组件100的技术优势相同,此处不再赘述。
57.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
58.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
59.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
60.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
61.在本实用新型中,术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
62.尽管已经示出和描述了上述实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域普通技术人员对上述实施例进行的变化、修改、替换和变型均在本实用新型的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
