1.本发明涉及具有自动盖的搅拌机、并且特别地涉及具有自动盖的下述搅拌机:该搅拌机可以在具有紧凑结构的同时有效地防止噪声产生,并且该搅拌机通过在食物加工操作与盖打开/关闭操作之间建立的联系而允许容易检查食物加工操作是否完成、快速移除容器、并且在盖打开/关闭操作期间防止由于下述两者引起的与安全有关的事故,从而由此显著地提高了用户的安全性和便利性:由于在盖的关闭期间用户的手被盖卡住、或者由于在食物加工操作期间出现错误比如过载。
背景技术:
2.通常,搅拌机是一种用于加工(例如混合或切碎)食物的电器,并且搅拌机可以通过从布置在主体中的马达至加工构件的扭矩传输使以可旋转的方式布置在容器中的加工构件(例如,刀片)旋转来对安装在主体的上部侧部上的容器中的食物进行加工。
3.这种搅拌机可以包括各种噪声产生源。例如,在将驱动力从马达传输至加工构件的机构的操作期间、或者由于容器中的食物与加工构件和容器内壁的碰撞可能产生大的噪声。这种噪声大到足以中断用户与周围人之间的对话并且中断宜人环境的形成,并且因此这种噪声需要阻隔。
4.常规地,在食物和饮料制造业中使用的食物加工机或搅拌机中已经使用了隔音盖。
5.用于搅拌机的典型隔音盖用于使食物加工期间产生的噪声最小化。
6.这种隔音盖主要用在商业设施比如餐厅、咖啡馆和鸡尾酒酒吧,以减少干扰和客户不适度。
7.当搅拌机用在商业设施比如餐厅或咖啡馆中时,用户必须手动打开或关闭盖以进行食物加工。然而,该过程需要许多耗时的手动操作,因此导致用户疲劳增加。
8.另外,这种典型的搅拌机的问题在于:难以在嘈杂的房子或商业设施中通过声音来确认食物加工是否完成并且也难以在视觉上确认食物加工是否完成。
技术实现要素:
9.技术问题
10.构思本发明的实施方式以解决本领域的这种问题,并且提供了一种具有自动盖的搅拌机,该搅拌机可以在具有紧凑结构的同时有效地防止噪声产生,并且该搅拌机在用于房子或商业设施中时通过在食物加工操作与盖打开/关闭操作之间建立联系而允许容易检查食物加工操作是否完成、快速移除容器、并且在盖打开/关闭操作期间预防由于下述两者引起的与安全有关的事故:由于在盖的关闭期间用户的手被盖卡住、或者由于在食物加工操作期间出现错误比如过载,从而由此显著地提高了用户的安全性和便利性。
11.技术解决方案
12.根据本发明的一方面,提供了一种具有自动盖的隔音的搅拌机,该搅拌机包括:主
体,在该主体上坐置有容器,该容器在其中接收加工对象;和盖,该盖布置成包围容器的至少一部分,其中,盖自动地打开或关闭容器的至少一部分。
13.有利效果
14.根据本发明的搅拌机可以在具有紧凑结构的同时有效地防止噪声产生,并且通过在食物加工操作与盖打开/关闭操作之间建立联系而允许容易检查食物加工操作是否完成,以及安全且快速地移除容器,从而由此显著地提高了用户的便利性。
附图说明
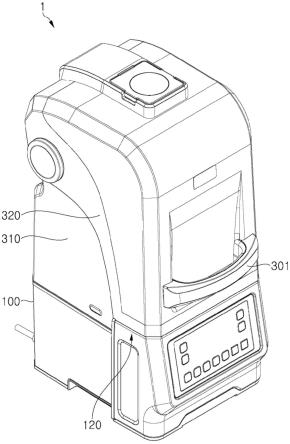
15.图1是根据本发明的一个实施方式的具有自动盖的搅拌机的立体图,图2是图1的搅拌机的侧视截面图,并且图3是在盖处于打开位置的情况下的图1的搅拌机的视图。
16.图4是图示了根据本发明的一个实施方式的搅拌机的操作控制的框图。
17.图5是根据本发明的一个实施方式的盖致动器的视图。
18.图6是根据本发明的一个实施方式的打开/关闭检测构件的视图。
19.图7至图12是图示了根据本发明的一个实施方式的扭矩补充构件的操作的视图。图7和图8示出了在盖处于打开位置的情况下的扭矩补充构件,图9和图10示出了在盖放置于屈曲区域情况下的扭矩补充构件,并且图11和图12示出了在盖处于关闭位置的情况下的扭矩补充构件。
20.图13至图17是图示了根据本发明的各种实施方式的快速开关的放置的视图。
21.图18至图22示出了根据本发明的一个实施方式的主体台阶部分和盖台阶部分。图18是主体台阶部分的视图,图19是盖台阶部分的视图,并且图20至图22是图示了根据本发明的各种实施方式的主体台阶部分与盖台阶部分之间的联接的视图。
22.图23至图26示出了根据本发明的各种实施方式的容器识别装置。
具体实施方式
23.在下文中,将对本发明的实施方式进行详细描述。应当理解的是,本发明不限于以下实施方式并且可以以不同的方式来实施,并且提供这些实施方式是为了完全公开并且使本领域的技术人员透彻地理解本发明。
24.将理解的是,当比如层、膜、区域或基底之类的元件被称为放置于另一元件“上”或另一元件“下方”时,该元件可以直接放置于另一元件上,或者也可以存在中间层。另外,从观察者的视角来限定空间相对术语,比如“上部”和“下部”,并且当观察者的视角改变时,“上部(部分)”可能意味着“下部(部分)”,或“下部(部分)”可能意味着“上部(部分)”。
25.将注意的是,在整个说明书和附图中,相似的部件用相似的附图标记来表示。另外,将理解的是,术语“包括”、“包含”、“包括有”和/或“包含有”在用于本说明书时说明了所述特征、步骤、操作、元件和/或部件的存在,但并不排除存在或添加一个或更多个其他特征、步骤、操作、元件、部件和/或组。
26.如本文中所使用的,表述“盖处于打开位置”是指盖坐置在凹部上,并且在打开/关闭检测构件检测到盖沿使盖打开的方向旋转了由用户预确定的角度时,盖可以被认为处于打开位置。
27.如本文中所使用的,表述“盖处于关闭位置”是指盖的下部表面坐置在主体的上部
部分和/或盖安装部的上部表面上,并且在打开/关闭检测构件检测到盖沿使盖关闭的方向旋转了由用户预确定的角度时,盖可以被认为处于关闭位置。
28.如本文中所使用的,术语“打开操作”指的是将盖旋转至打开位置的操作,并且术语“关闭操作”指的是将盖旋转至关闭位置的操作。另外,“打开/关闭操作”包括“打开操作”和“关闭操作”。
29.根据本发明的一个方面,提供了一种具有自动盖的隔音的搅拌机,该搅拌机包括:主体,在该主体上坐置有容器,该容器在其中接收加工对象;和盖,该盖布置成包围该容器的至少一部分,其中,盖自动打开或关闭容器的至少一部分。
30.在一个实施方式中,搅拌机还可以包括:主体致动器,该主体致动器布置在主体的内部,并且提供动力以便对容器内部的加工对象进行加工;盖致动器,该盖致动器对盖的打开/关闭操作进行控制;和控制器,该控制器以操作性连接的方式对主体致动器和盖致动器进行控制。
31.此处,控制器可以控制下述各者中的至少一者:第一操作,该第一操作包括通过对盖致动器和主体致动器进行操作来将盖移动至关闭位置并且启动容器内部的加工操作;和第二操作,该第二操作包括响应于加工操作的完成通过对主体致动器和盖致动器的操作进行控制而将盖移动至打开位置。
32.此处,在第一操作期间在盖完全关闭之前,当盖的关闭操作停止了预定的时间量,控制器可以启动盖的打开操作。
33.另外,当下述各者中的至少一者发生时,控制器可以启动第二操作:完成主体致动器的操作同时满足预定要求;以及在主体致动器的操作期间检测到错误。
34.在一个实施方式中,搅拌机还可以包括真空马达,该真空马达对容器内部空间中的真空进行控制,其中,第一操作还可以包括在盖移动至关闭位置并且容器的内部空间切换至真空状态后启动容器内部的加工操作,并且第二操作还可以包括在完成容器内部的加工操作并且完成真空马达的操作后启动盖的打开操作。
35.在一个实施方式中,搅拌机还可以包括快速开关,该快速开关将用于启动第一操作和第二操作中的至少一者的信号传输至控制器。
36.此处,快速开关可以包括:一键式触摸按钮,该一键式触摸按钮通过检测用户的触摸来传输信号;语音识别装置,该语音识别装置通过检测用户的语音来传输信号;和容器识别装置,该容器识别装置检测容器是否坐置在主体上。
37.根据本发明的另一方面,提供了一种具有自动盖的隔音的搅拌机,该搅拌机包括:主体,在该主体上坐置有容器,该容器在其中接收加工对象;和盖,该盖布置成包围容器的至少一部分,其中,盖自动打开或关闭限定在主体与盖安装部之间的空间,盖安装部布置在主体的上部部分处,并且盖包括盖台阶部分,该盖台阶部分形成在盖的与主体邻接的表面上,主体包括主体台阶部分,该主体台阶部分形成在主体的与盖相邻的表面上,并且盖台阶部分和主体台阶部分在形状上彼此对应,以在盖处于关闭位置时将由盖限定的空间与外部环境隔离。
38.此处,盖台阶部分可以包括从盖的内表面突起的第一弯曲部分、从第一弯曲部分向上弯曲的第二弯曲部分、以及从第二弯曲部分朝向盖的内表面延伸的第三弯曲部分,并且主体台阶部分可以包括从主体的外表面朝向主体的中心弯曲的第一主体弯曲部分、从第
一主体弯曲部分向上弯曲的第二主体弯曲部分、从第二主体弯曲部分朝向主体的中心弯曲的第三主体弯曲部分、以及从第三主体弯曲部分向上突起的主体突起部,其中,在盖处于关闭位置时,第一弯曲部分邻接第三主体弯曲部分。
39.当盖处于关闭位置时,盖的下部表面可以坐置在第一主体弯曲部分上。
40.当盖处于关闭位置时,第一弯曲部分可以邻接盖安装部的上部表面,以将由盖限定的空间与外部环境隔离。
41.盖安装部可以包括形成在其外表面上的凹部,使得在盖处于打开位置时,盖的至少一部分坐置在凹部上。
42.根据本发明的又一方面,提供了一种具有自动盖的隔音的搅拌机,该搅拌机包括:主体,在该主体上坐置有容器,该容器在其中接收加工对象;盖,该盖自动打开或关闭限定在主体与盖安装部之间的空间,盖安装部布置在主体的上部侧部处;盖致动器,该盖致动器对盖的打开/关闭操作进行控制;和控制器,该控制器对盖致动器的操作进行控制,其中,盖致动器包括旋转体、打开/关闭检测构件和马达,旋转体联接至盖,以能够与盖的打开/关闭操作相关联地旋转,打开/关闭检测构件检测盖的打开/关闭,马达产生要传输至旋转体的动力。
43.此处,打开/关闭检测构件可以包括至少一个旋转传感器,以基于旋转体的旋转程度来检测盖的打开/关闭。
44.在一个实施方式中,盖致动器还可以包括:马达变速箱,该马达变速箱连接至马达以对马达的传输至旋转体的动力进行控制;和传输构件,该传输构件布置在旋转体与马达变速箱之间,以将马达的动力传输至旋转体,其中,控制器可以通过对传输构件的控制来控制是否将马达的动力传输至旋转体。
45.此处,旋转体可以包括第一旋转体和第二旋转体,其中,第一旋转体与盖致动器的传输构件间隔开,并且第二旋转体连接至传输构件,使得马达的动力传输至第二旋转体。
46.此处,打开/关闭检测构件可以连接至盖致动器的第一旋转体。
47.盖致动器还可以包括扭矩补充构件,该扭矩补充构件在盖的打开/关闭操作期间对马达的动力进行补充。
48.此处,扭矩补充构件可以包括至少一个弹性体,其中,在盖处于打开位置或关闭位置时,弹性体维持在压缩位置中,并且在盖的打开/关闭操作期间,弹性体从压缩位置释放。
49.此处,扭矩补充构件可以包括屈曲区域,该屈曲区域限定为弹性体的压缩位置,其中,盖维持在盖的打开位置与关闭位置之间的稳定位置。在弹性体的压缩位置离开屈曲区域时,旋转体可以旋转以使盖移动至打开位置或关闭位置。
50.根据本发明的又一实施方式,提供了一种具有自动盖的隔音的搅拌机,该搅拌机包括:主体,在该主体中坐置有容器,该容器在其中接收加工对象;主体致动器,该主体致动器布置在主体的内部并且提供动力以对容器内部的加工对象进行加工;盖,该盖打开或关闭限定在主体与盖安装部之间的空间,盖安装部布置在主体的上部侧部处;盖致动器,该盖致动器对盖的打开/关闭操作进行控制;和控制器,该控制器以操作性连接的方式对主体致动器和盖致动器进行控制,其中,盖致动器包括旋转体、打开/关闭检测构件和马达,旋转体联接至盖,以能够与盖的打开/关闭操作相关联地旋转,打开/关闭检测构件检测盖的打开/关闭,马达产生要传输至旋转体的动力。
51.此处,控制器可以控制第一操作,该第一操作包括:操作马达以使旋转体旋转;以及响应于由打开/关闭检测构件检测到盖处于关闭位置来操作主体致动器以启动容器内部的加工操作。
52.在第一操作期间在由打开/关闭检测构件检测到盖处于关闭位置之前盖的关闭操作停止了预定时间量时,控制器可以操作马达以使旋转体旋转,直到由打开/关闭检测构件检测到盖处于打开位置为止。
53.另外,在出现下述各者中的至少一者时:完成第一操作同时满足预定要求;以及检测到主体致动器的操作错误,控制器可以控制第二操作,该第二操作包括停止主体致动器的操作以及操作马达以使旋转体旋转,直到由打开/关闭检测构件检测到盖处于打开位置为止。
54.搅拌机还可以包括真空马达,该真空马达对容器内部空间中的真空进行控制,其中,第一操作还可以包括在由打开/关闭检测构件检测到盖处于关闭位置并且检测到容器的内部空间处于真空状态时,操作主体致动器以启动容器内部的加工操作,并且在出现下述各者中的至少一者时:完成第一操作同时满足预定要求;以及检测到主体致动器的操作错误,并且在检测到真空马达的操作完成时,第二操作还可以包括停止主体致动器的操作以及操作马达以使旋转体旋转,直到由打开/关闭检测构件检测到盖处于打开位置为止。
55.另外,搅拌机还可以包括快速开关,该快速开关将用于启动第一操作和第二操作中的至少一者的信号传输至控制器,其中,快速开关可以包括选自下述各者中的至少一者:一键式触摸按钮,该一键式触摸按钮通过检测用户的触摸来传输信号;语音识别装置,该语音识别装置通过检测用户的语音来传输信号;和容器识别装置,该容器识别装置检测容器是否坐置在主体上。
56.在下文中,将参照附图对本发明的示例性实施方式进行描述。
57.图1是根据本发明的一个实施方式的具有自动盖的搅拌机的立体图,图2是图1的搅拌机的侧视截面图,图3是在盖处于打开位置的情况下的图1的搅拌机的视图,并且图4是图示了根据本发明的一个实施方式的搅拌机的操作控制的框图。
58.参照图1至图4,具有自动盖的搅拌机(在下文中为“搅拌机”1)包括主体100、容器200,盖安装部310、盖320、主体致动器110、盖致动器400和控制器500。
59.主体100可以包括操作单元10(参见图4),操作单元10布置在主体100的外表面以响应于用户对操作按钮进行操作来对容器200中的加工对象(例如原料)进行加工。操作单元10(参见图4)可以包括语音信号传感器或与移动应用程序通信的通信单元,以通过移动应用程序响应于用户的语音指令或用户输入来对容器200中的加工对象进行加工。
60.容器200可以坐置在主体100上。容器200具有用于接收加工对象的内部空间,并且包括加工对象被引入容器200中的开口。另外,容器200可以包括能够打开/关闭开口的盖子。例如,盖子可以通过真空软管610连接至以下描述的真空马达600以将容器200的内部空间抽空。
61.另外,容器200可以包括布置在其中的旋转刀片。刀片可以连接至下面描述的主体致动器110以对容器200中的加工对象进行加工、例如切碎。此处,表述“连接至主体致动器”是指刀片由主体致动器110的马达提供动力。
62.盖安装部310可以至少部分地布置在主体100的上部部分处,以包围容器200的至
少一部分。盖安装部310可以包围容器200的至少一部分、例如容器200的后向侧部和侧向侧部的至少一部分。例如,如图3(a)中所示的,盖安装部310可以以可拆卸的方式布置在主体100的上部部分处,或者如图3(b)中所示的,盖安装部310可以形成为主体100的一部分。
63.盖安装部310包括凹部311,该凹部311形成在盖安装部310的外表面上并且允许处于打开位置的盖320至少部分地坐置在凹部311上,从而由此增加了盖320的旋转程度。
64.盖320可以打开或关闭限定在盖安装部310与主体100之间的空间,以便在盖处于关闭位置时完全包围容器200。尽管盖320的打开/关闭操作可以通过例如盖320的断开附接/附接、折叠/展开或旋转来执行,但是将参考其中盖320的打开/关闭操作通过盖320的旋转来执行的实施方式对本发明进行描述。例如,当盖320的打开/关闭操作通过盖320的旋转来执行时,盖320可以相对于主体100竖向地旋转,或者可以相对于主体100侧向地旋转。
65.盖320可以通过盖致动器400在预确定角度范围内旋转,将在下面描述盖致动器400的特定实施方式。
66.因此,在盖320处于关闭位置时,容器200可以被盖安装部310和盖320完全包围,由此防止在加工操作期间于容器200的内部空间中产生的噪声泄漏。
67.参照图4,搅拌机1可以包括控制器500、主体致动器110、盖致动器400和真空马达600。
68.主体致动器110可以布置在主体100的内部,以提供动力以便对容器200内部的加工对象进行加工。例如,主体致动器110可以包括产生动力以使刀片旋转的主体致动器马达、传输动力的齿轮轴等。
69.盖致动器400可以对盖320的打开/关闭操作进行控制,将在下面进一步描述盖致动器400的细节。
70.真空马达600可以将容器200的内部空间在真空状态与大气压力状态之间进行切换。
71.控制器500可以以操作性连接的方式对主体致动器110和盖致动器400进行控制。替代性地,控制器500可以以操作性连接的方式对主体致动器110、盖致动器400和真空马达600进行控制。
72.例如,控制器500可以对第一操作和第二操作中的至少一者进行控制。
73.控制器500可以控制下述第一操作:该第一操作包括通过对盖致动器400和主体致动器110进行操作来将盖移动至关闭位置并且启动容器200的内部的加工操作。
74.另外,控制器500可以控制下述第二操作:该第二操作包括响应于容器200内部的加工操作的完成通过对主体致动器110和盖致动器400的操作进行控制而将盖320移动至打开位置。例如,控制器500可以在将主体致动器110的操作停止后操作盖致动器400,控制器500可以在将主体致动器110的操作停止的同时操作盖致动器400,或者控制器500可以在操作盖致动器后停止主体致动器110的操作。例如,控制器500在第二操作期间对主体致动器110和盖致动器400进行操作的顺序可以预确定、或者可以由用户改变。
75.也就是说,当用户对操作单元10(参见图4)进行操作时、例如按压操作按钮、输入语音信号或将通信信号经由用户终端发送至操作单元10时,在由以下所描述的容器识别装置检测到容器200坐置在主体100上时、或者在容器坐置于主体上之后预定的时间量流逝时,可以自动地执行将盖320从打开位置移动至关闭位置的操作以及容器内部的加工操作、
即使用旋转的刀片将原料切碎的操作,由此提高了用户的便利性。
76.另外,当盖320的关闭操作没有在启动第一操作之后的预定的时间量内完成时,控制器500可以启动盖320的打开操作。例如,由于在第一操作期间盖320旋转至关闭位置时用户的手卡在盖320与主体100之间,在盖320停止旋转0.1秒至1分钟、例如1秒至5秒时,或者,在启动第一操作后的0.1秒至1分钟、例如1秒至5秒内没有完成盖320的关闭时,盖320可以旋转至打开位置。例如,在盖致动器400的马达440的负载在盖320至关闭位置的旋转期间超过预定范围时,盖320可以旋转至打开位置。
77.因此,在盖320不能移动至关闭位置的情况下,可以防止以下描述的马达440的过载或与安全有关的事故的发生。
78.另外,控制器500可以在出现下述各者中的至少一者时启动第二操作:在完成主体致动器110的操作的同时满足预定要求;以及在主体致动器110的操作期间检测到错误。例如,预定要求可以包括以下内容:主体致动器110被操作了预定切碎时间;主体致动器110的操作根据预定食谱来完成等。例如,操作错误可以包括在第一操作期间主体致动器110的过载或容器200与主体致动器110的分开。
79.因此,响应于将操作信号输入至操作单元10(参见图4)的单个用户动作,搅拌机1执行一系列操作,包括:将盖320旋转至关闭位置;将容器内部的原料切碎;在预定切碎时间流逝后,停止主体致动器110的操作;以及将盖320旋转至打开位置,由此允许用户可以容易地检查加工操作是否完成,即使在嘈杂的房子或商业设施中也是如此,并且允许用户以快速且安全的方式取出容器,因此提供高的用户便利性。此外,在对容器内部的原料进行加工的操作期间发生用户难以检测的问题时,搅拌机1可以使加工操作自动地停止并且使盖320旋转至打开位置,由此防止对搅拌机1的损坏并确保用户安全。
80.例如,控制器500可以对第一操作和第二操作中的至少一者、包括真空马达600的操作进行控制。
81.此处,第一操作还可以包括在盖320旋转至关闭位置并且容器200的内部空间切换至真空状态之后,启动容器200的内部的加工操作。另外,第二操作还可以包括在完成容器200内部的加工操作的同时满足上述预定的要求并且真空马达600的操作完成后,启动盖320的打开操作。此处,“完成真空马达600的操作”可能意味着容器200的内部空间在被抽空至预定真空水平后维持在真空状态下或切换至大气压力状态。也就是说,第二操作可以包括在完成容器200内部的加工操作的同时满足预定要求后,在容器的内部空间维持在真空状态下或切换至大气压力状态的情况下,启动盖320的打开操作。
82.因此,响应于将操作信号输入至操作单元10(参见图4)的单个用户动作来执行真空状态下的容器内部的原料的加工,可以连续地执行第一操作和第二操作,由此提供高的用户便利性。
83.搅拌机1还可以包括快速开关700,后面将参照图13至图17进一步描述快速开关700。
84.图5是根据本发明的一个实施方式的盖致动器的视图,图6是根据本发明的一个实施方式的打开/关闭检测构件的视图,并且图7至图12是图示了根据本发明的一个实施方式的扭矩补充构件的操作的视图。图7和图8示出了在盖处于打开位置的情况下的扭矩补充构件,图9和图10示出了在盖放置于屈曲区域的情况下的扭矩补充构件,并且图11和图12示出
了在盖处于关闭位置的情况下的扭矩补充构件。
85.参照图5,盖致动器400可以包括旋转体411、412、打开/关闭检测构件430、马达440和传输构件460。
86.旋转体411、412可以联接至盖320,以能够与盖320的打开/关闭操作相关联地旋转。例如,旋转体411、412可以紧固至盖320,使得盖320通过旋转体411、412的旋转而旋转。
87.在一个实施方式中,旋转体可以包括第一旋转体411和第二旋转体412,第一旋转体411与下面描述的传输构件460分开,第二旋转体412连接至传输构件460。此处,表述“连接至传输构件”是指盖致动器400的马达440向对应的旋转体提供动力,并且表述“与传输构件分开”是指盖致动器400的马达440不向对应的旋转体提供动力。
88.例如,在变速箱470布置于第二旋转体412与传输构件460之间时,传输构件460和第二旋转体可以被认为彼此连接,因为马达440的动力通过传输构件460和变速箱470而提供至第二旋转体412。也就是说,马达440的动力传输至第二旋转体412,使得盖320通过第二旋转体412和第一旋转体411的旋转而旋转,第一旋转体411相对于盖320布置成与第二旋转体412相反并且与盖320的旋转结合地旋转。
89.打开/关闭检测构件430可以检测盖320的打开/关闭。
90.参照图6,打开/关闭检测构件430可以包括布置在pcb 433上的至少一个旋转传感器431、432,以基于旋转体411、412的旋转程度来检测盖的打开/关闭320。
91.在一个实施方式中,旋转传感器431、432可以包括微型开关。
92.在一个实施方式中,打开/关闭检测构件430可以包括两个旋转传感器431、432和位置指示器434,该位置指示器434布置在旋转传感器431、432之间,以能够结合旋转体411、412的旋转而移动。例如,在位置指示器434移动至与第一旋转传感器431邻接的位置时,可以由控制器500检测到盖320处于完全打开的位置,以及在位置指示器434移动至与第二旋转传感器432邻接的位置时,可以由控制器500检测到盖320处于关闭位置,其中,盖320的下部表面邻接于主体100,以使限定在盖安装部310与主体100之间的空间关闭。
93.马达440可以产生要传输至第二旋转体412的动力。例如,马达440的动力可以直接地传输至第二旋转体412,或者可以在通过马达变速箱450控制之后传输至第二旋转体412。例如,马达440可以安装在主体100的内部。
94.传输构件460可以布置在第二旋转体412与马达变速箱450之间,以将动力从马达440传输至第二旋转体412。此处,控制器500可以通过对传输构件460的控制来控制是否将动力从马达440传输至第二旋转体412。
95.例如,传输构件460可以是电子类型,并且可以包括例如使用电磁力的电子离合器。例如,电子离合器可以包括连接部分461,该连接部分461与马达变速箱450连接或断开连接以允许或切断动力传输。连接部分461包括下述构件:该构件构造成与马达变速箱450至少部分地断开连接,以切断动力传输。
96.此处,电子离合器可以设计成使得连接部分461通常与马达变速箱450断开连接。因此,第二旋转体412通常与马达440断开接合,使得盖320可以由用户手动地旋转。
97.另外,电子离合器可以设计成使得连接部分461在施加电力后连接至马达变速箱450。因此,第二旋转体412在电力施加至电子离合器后与马达440接合,使得盖320可以通过马达440的驱动力而旋转。
98.此处,打开/关闭检测构件430可以连接至第一旋转体411。因此,即使在尽管马达440被驱动以向第二旋转体412提供动力但是盖320由于第二旋转体412的损坏等而不旋转时,仍可以准确地检测盖320的打开/关闭。
99.盖致动器400还可以包括马达变速箱450、变速箱470和扭矩补充构件420。
100.马达变速箱450连接至马达440,以对从马达440传输至第二旋转体412的动力进行控制。
101.变速箱470可以将马达440的动力提供至第二旋转体412,该第二旋转体412安装在与安装有马达440的轴不同的轴上。此处,安装有第二旋转体412的轴可以平行或不平行于安装有马达440的轴。为了提供紧凑的设计,搅拌机1可以具有下述结构:其中,盖致动器400布置在由盖安装部310和盖320封闭的空间中。然而,如果马达440安装在与旋转体411、412相同的轴上,则这可能引起在盖致动器400与容器200之间的干扰,或者使实现紧凑的设计变得困难。因此,在变速箱470将马达440的动力传输至与马达440的轴不同的轴的情况下,根据本发明的搅拌机1可以通过改善空间利用率来实现紧凑的设计。
102.扭矩补充构件420可以对盖320的打开/关闭操作所需的动力进行补充。为了提高噪声阻隔的能力,搅拌机1可以采用相对重的盖320,该盖320的重量超过预确定值。此处,扭矩补充构件420允许盖320使用较少的手动力或使用马达440的较小动力而打开或关闭。
103.参照图7至图12,扭矩补充构件420可以包括至少一个弹性体421a、421b。当盖320停留处于关闭位置或处于打开位置时,弹性体421a、421b维持在压缩位置中,并且在盖320的打开/关闭操作期间,弹性体421a、421b从压缩位置释放,以对盖320的打开/关闭操作所需的动力进行补充。
104.参照图9,扭矩补充构件420可以包括屈曲区域,该屈曲区域限定为弹性体421a、421b的压缩位置,从而允许盖320维持在盖320的打开位置与关闭位置之间的稳定位置中。
105.也就是说,在弹性体421a、421b的压缩位置离开屈曲区域时,盖320的第一旋转体411可以旋转,使得盖320通过盖320的重量而移动至打开位置或关闭位置。
106.在一个实施方式中,扭矩补充构件420可以包括:第一弹性体421a和第二弹性体421b,第一弹性体421a和第二弹性体421b分别对打开盖320所需的扭矩和关闭盖320所需的扭矩进行补充;第一按压构件422和第二按压构件423,第一按压构件422和第二按压构件423分别按压第一弹性体421a和第二弹性体421b;和多个止挡部424,所述多个止挡部424对第一弹性体421a和第二弹性体421b以及第一按压构件422和第二按压构件423的运动范围进行控制。
107.例如,第一按压构件422可以在其至少一个端部处设置有第一按压构件端部件422a,并且第二按压构件423可以在其至少一个端部处设置有第二按压构件端部件423a。第一按压构件端部件422a的直径可以大于或等于第一弹性体421a的直径,并且第二按压构件端部件423a的直径可以大于或等于第二弹性物体421b的直径。例如,第一按压构件端部件422a和第二按压构件端部件423a的直径可以分别比第一弹性体421a和第二弹性体421b的直径更大,以防止第一按压构件422和第二按压构件423与第一弹性体421a和第二弹性体421b分开。
108.在一个实施方式中,屈曲区域可以包括扭矩补充构件420的下述区域:在该区域中,第一按压构件端部件422a和第二按压构件端部件423a中的至少一者与止挡部424以预
确定的距离或更小的距离间隔开。
109.参照图7和图8,在盖320处于打开位置时,第一弹性体421a维持处于压缩位置,因为第一按压构件422对应于320盖的旋转程度来按压第一弹性体421a,并且盖320设计成具有比第一弹性体421a的恢复力大的重量。因此,第一弹性体421a的恢复力添加至施加至盖以使盖320旋转的用户的手动力或马达440的驱动力,由此盖320可以更容易地旋转。
110.参照图9和图10,在第一弹性体421a和第二弹性体421b中的至少一者响应于盖320的旋转而放置在屈曲区域中时,弹性体421a、421b的恢复力平衡盖320的重量,由此盖320可以维持在打开位置与关闭位置之间的稳定位置中。
111.此处,弹性体421a或421b的位置是指弹性体421a或421b的端部的位置,例如弹性体421a或421b的与第一按压构件422或第二按压构件423邻接的一部分的位置。因此,在第一弹性体421a和第二弹性体421b离开屈曲区域时,盖320可以通过盖320的重量而旋转至打开位置或关闭位置。
112.参照图11和图12,在盖320处于关闭位置时,第二弹性体421b可以维持在压缩位置中,因为第二按压构件423对应于盖320的旋转程度来按压第二弹性体421b,并且盖320设计成具有比第一弹性体421a的恢复力大的重量。因此,第二弹性体421b的恢复力添加至施加至盖以使盖320旋转的用户的手动力或马达440的驱动力,由此盖320更容易地旋转。
113.另外,第一弹性体421a和第二弹性体421b的弹性和/或长度可以根据从盖的320关闭位置或打开位置至屈曲区域的旋转程度来变化。
114.在一个实施方式中,根据本发明的搅拌机1可以采用下述结构:在该结构中,从关闭位置至屈曲区域的旋转程度大于从打开位置至屈曲区域的旋转程度,以便确保足够的空间来将容器200联接至主体100的上部表面或与主体100的上部表面分开,以实现搅拌机1的紧凑设计,并且提高噪声阻隔能力。因此,第二弹性体421b的长度可以比第一弹性体421a大。
115.如上所述,由于根据本发明的搅拌机1构造成使得主体致动器110和盖致动器400操作性地连接至彼此,因此在容器200联接至主体100的上部表面的情况下响应于将操作信号输入至操作单元10(参见图4)的单个用户动作,可以自动地执行上述的第一操作和第二操作。此处,操作信号可以包括:按压操作按钮;输入语音信号;经由用户终端发送通信信号;由下面描述的容器识别装置检测到容器200坐置在主体上以及在将容器200坐置在主体100上之后预定时间量的流逝。
116.也就是说,控制器500可以控制第一操作,该第一操作包括操作马达440以使第二旋转体412旋转以及响应于由打开/关闭检测构件430检测到盖320处于关闭位置来操作主体致动器110以启动容器内部的加工操作。
117.另外,当盖320的关闭操作未在启动第一操作后的预定时间量内完成时(即,打开/关闭检测构件430未检测到盖320处于关闭位置),控制器500可以操作马达400以使第二旋转体412旋转,直到由打开/关闭检测构件430检测到盖320处于打开位置为止。
118.在出现以下各者中的至少一者时:完成第一操作同时满足预定要求;以及检测到主体致动器110的操作错误,控制器500可以进一步控制第二操作,该第二操作包括停止主体致动器110的操作以及操作马达440以使第二旋转体412旋转,直到由打开/关闭检测构件430检测到盖320处于打开位置为止。
119.另外,当搅拌机1还包括如上所述对容器200的内部空间中的真空进行控制的真空马达600时,真空马达600的操作可以结合在第一操作和第二操作中。
120.也就是说,第一操作还可以包括在由打开/关闭检测构件430检测到盖320处于关闭位置并且检测到容器200的内部空间处于真空状态时,操作主体致动器110以启动容器200内部的加工操作。
121.在发生以下各者中的至少一者时:完成第一操作同时满足预定要求;以及检测到主体致动器110的操作错误并且完成真空马达600的操作,第二操作还可以包括停止主体致动器110的操作以及操作马达440以使第二旋转体412旋转,直到由打开/关闭检测构件430检测到盖320处于打开位置为止。此处,真空马达600的操作的完成如上所述。
122.图13至图17是图示了根据本发明的各种实施方式的快速开关的放置的视图。
123.参照图13至图17,搅拌机1还可以包括快速开关700,该快速开关700将用于启动第一操作和第二操作中的至少一者的信号传输至控制器500。
124.快速开关700可以包括选自下述各者中的至少一者:一键式触摸按钮,该一键式触摸按钮通过检测用户的触摸来传输信号;语音识别装置,该语音识别装置通过检测用户的语音来传输信号;和容器识别装置,该容器识别装置检测容器200是否坐置在主体100上。
125.参照图13,快速开关700可以布置在主体100的上部表面上,使得用户可以在将容器200联接至主体100的上部部分后立即触摸快速开关700。
126.参照图14,快速开关700可以布置在容器200所坐置的区域中。在该实施方式中,可以在用户将容器200联接至主体100的上部部分的同时、或者在将容器200联接至主体100的上部部分后预定时间流逝时,操作快速开关700。
127.参照图15,快速开关700可以布置在盖把手301上。参照图16,快速开关700可以布置在主体100的外表面上、例如在操作单元10(参见图4)上。参照图17,快速开关700可以布置在旋转体411、412上。然而,应该理解的是,本发明不限于此,并且除了附图中示出的位置之外,快速开关700可以布置在任何其他合适的地方处,包括盖320、主体100或盖安装部310。
128.图18至图22示出了根据本发明的一个实施方式的主体台阶部分和盖台阶部分。图18是主体台阶部分的视图,图19是盖台阶部分的视图,并且图20至图22是图示了根据本发明的各种实施方式的主体台阶部分与盖台阶部分之间的联接的视图。
129.参照图18至图22,盖320包括盖台阶部分321,该盖台阶部分321形成在盖320的与主体100邻接的表面上,并且主体100包括主体台阶部分120,该主体台阶部分120形成在主体100的与盖320邻接的表面上,其中,盖台阶部分321和主体台阶部分120可以在形状上彼此对应,以在盖320处于关闭位置时将由盖安装部310和盖320限定的空间与外部环境隔离,从而由此显著提高了噪声阻隔能力。
130.参照图18,主体台阶部分120可以包括从主体的外表面128朝向主体100的中心弯曲的第一主体弯曲部分121、从第一主体弯曲部分121向上弯曲的第二主体弯曲部分122、和从第二主体弯曲部分122朝向主体100的中心弯曲的第三主体弯曲部分123、以及从第三主体弯曲部分123向上突起的主体突起部124。
131.参照图19,盖台阶部分321可以包括从盖的内表面321d突起的第一弯曲部分321a、从第一弯曲部分321a向上弯曲的第二弯曲部分321b、以及从第二弯曲部分321b朝向盖的内
表面321d延伸的第三弯曲部分321c。
132.参照图20,在盖320处于关闭位置时,盖的下部表面321e坐置在第一主体弯曲部分121上,并且第一弯曲部分321a邻接第三主体弯曲部分123。因此,可以有效地防止噪声从由盖安装部310、盖320和主体100限定的空间泄漏。另外,可以防止从容器200中溢出的液体从由盖320和主体100限定的空间泄漏到盖320的外部,同时防止由于溢出的液体对主体的损坏。
133.参照图21,在盖320处于关闭位置时,盖的下部表面321e坐置在第一主体弯曲部分121上,第一弯曲部分321a邻接第三主体弯曲部分123,并且第二弯曲部分321b邻接主体突起部的外表面124a。因此,可以有效地防止噪声从由盖安装部310、盖320和主体100限定的空间泄漏。另外,可以防止从容器200中溢出的液体从由盖安装部310、盖320和主体100限定的空间泄漏到盖320的外部,同时防止由于溢出的液体对主体的损坏。
134.参照图22,在盖320处于关闭位置时,盖的下部表面321e坐置在第一主体弯曲部分121上,第一弯曲部分321a邻接第三主体弯曲部分123,第二弯曲部分321b邻接主体突起部的向外表面124a,并且盖的内表面321d邻接第二主体弯曲部分123。因此,可以有效地防止噪声从由盖320和主体100限定的空间泄漏。另外,可以防止从容器200中溢出的液体从由盖320和主体100限定的空间泄漏到盖320的外部,同时防止由于溢出的液体对主体的损坏
135.图23至图26示出了根据本发明的各种实施方式的容器识别装置。
136.响应于由容器识别装置800、800a或800b检测到容器200坐置在主体100上,控制器500可以启动上述第二操作。例如,容器识别装置800、800a或800b可以包括比如限位开关和簧片开关之类的传感器,或者可以包括比如nfc传感器、光接收传感器和光发射传感器之类的传感器。
137.参照图23至图26,容器识别装置800、800a或800b可以包括至少一个传感器,例如光学传感器、压力传感器和磁性传感器。
138.例如,容器识别装置800可以包括光发射元件810和光接收元件820。例如,光发射元件810可以包括光发射构件,并且光接收元件820可以包括光接收传感器。例如,在从光发射元件810发射的光在被布置于容器底部上的反射构件(未示出)反射后到达光接收元件820时,控制器500可以检测到容器200坐置在主体100上。
139.例如,参照图23,光发射元件810和光接收元件820可以布置在与容器紧固构件101分开预确定距离的位置处,容器紧固构件101从主体100的上部表面突起,或者光发射元件810和光接收元件820可以布置在多个容器紧固构件101之间以提高光发射效率和光接收效率。
140.例如,参照图24,光发射元件810和光接收元件820可以布置在容器紧固构件101上,以在改善空间利用率的同时防止了由于从容器200中溢出的液体对光发射元件810和光接收元件820的损坏。
141.例如,容器识别装置800a或800b可以包括压力传感器和磁性传感器中的至少一者,其中,压力传感器通过对大于或等于预定值的重量进行检测来检测容器坐置在容器上,并且磁性传感器通过对由于分别布置在磁性传感器和容器上的一对电磁体产生的磁场——磁场具有大于或等于预定值的大小——进行检测来检测到容器坐置在容器上。
142.参照图25,容器识别装置800a可以布置在与形成在主体的上部表面上的容器紧固
构件101分开预确定距离的位置处,或者容器识别装置800a可以布置在多个容器紧固构件101之间。容器识别装置800a可以直接接触容器的底部,以更有效地检测容器200是否坐置在主体上。
143.参照图26,容器识别装置800b可以布置在容器紧固构件101上,以在改善空间利用率的同时防止了由于从容器200中溢出的液体对容器识别装置800b的损坏。
144.尽管本文已经描述了一些实施方式,但应理解的是,提供这些实施方式仅用于说明,并且不应以任何方式解释为限制本发明。本发明的范围应该由所附权利要求及其等效物来限定。
145.例如,附图示意性地示出了作为主题的每个部件以有助于理解,并且附图中示出的每个部件的厚度、长度、数字等可能与实际的厚度、长度、数字等不同,这取决于形成附图的过程。另外,给出了以上实施方式中描述的每个部件的材料、形状、尺寸等仅用于说明,并且不应以任何方式解释为限制本发明,并且在没有大致上背离本发明的精神和范围的情况下,可以由本领域技术人员进行各种改型。
146.《相关申请的交叉参引》
147.本技术要求于2020年10月22日在韩国知识产权局提交的韩国专利申请no.10-2020-0137233的优选权和权益,该申请的全部公开内容通过参引并入本文。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。