1.本公开涉及一种机器人清洁器,该机器人清洁器能够以大的高度差主动地移动而不管地板表面改变。
背景技术:
2.机器人清洁器执行抽吸地板上的灰尘和异物的真空清洁功能或者在特定区域中自主地行进的同时拖扫地板的拖扫功能。
3.机器人清洁器通常包括可再充电电池和障碍物检测传感器,障碍物检测传感器被构造成在行进期间避开障碍物以在自主行进的同时执行清洁。
4.在机器人清洁器或真空清洁器中使用的清洁管嘴附着到地板表面,以在行进路径中将地板上的异物抽吸到清洁管嘴中。
5.然而,在相关技术中的清洁管嘴的情况下,当机器人清洁器在不同的地板环境中行进时,可能发生由于软地板和硬地板之间的高度差而导致管嘴单元卡在硬地板和软地板(例如,地毯、毛毯等)之间的边界线上的现象。
6.另外,当机器人清洁器在地毯等上行进时,由于地毯和刷子之间的摩擦可能产生较大的阻力,因此出现了驱动负荷和被构造成驱动刷子的驱动马达上的负荷增加,以及由于刷子的驱动马达的功耗增加而导致允许的清洁时间减少的问题。
7.为了解决这些问题,在kr 10-2017-0099627 a(于2017年9月1日公开:下文中称为专利文献1)中公开了一种机器人清洁器的抽吸结构。
8.专利文献1中公开的机器人清洁器包括抽吸单元和支撑部分,抽吸单元被构造成根据刷子的旋转来抽吸异物,支撑部分设置成从抽吸单元的一侧突出并且被构造成支撑抽吸单元以上升或下降。
9.然而,专利文献1中公开的支撑部分设置在清洁器主体的下表面上并且布置成粘附到地板表面。因此,存在地板表面上的异物可能被捕获在支撑部分中的问题。
10.另外,wo 2016/032257 al(于2016年3月3日公开;在下文中称为专利文献2)公开了一种抽吸管嘴、机器人清洁器及其控制方法。
11.专利文献2中公开的机器人清洁器安装在主体的下部中,以能够在向上/向下方向上移动,从而沿着待被清洁的表面向上或向下移动,并且包括抽吸管嘴,该抽吸管嘴被构造成使用主刷来清扫和抽吸存在于待被清洁的表面中的自由颗粒。
12.然而,在专利文献2中,连接部将抽吸管嘴连接到清洁器主体,使得抽吸管嘴可以相对于清洁器主体在向上/向下方向上移动,并且由于连接部位于清洁器主体的下部中,所以存在地板表面上的异物可能被捕获在连接部中的问题。
13.另外,us 7,448,113 b2(于2008年11月11日公开:专利文献3)公开了一种自主行进机器人清洁器。
14.专利文献3中公开的清洁头包括可旋转地铰接到壳体的平台。根据刷子的扭矩的增加,通过平台调节组件使容纳刷子的平台相对于壳体升高。
15.但是,在专利文献3所公开的平台调节组件的情况下,存在将平台连接到壳体的连杆的结构非常复杂的问题。
16.另外,us 8,881,339 b2(于2014年11月11日公开:专利文献4)公开了一种机器人清洁器。
17.专利文献4中公开的清洁组件(清洁头)被构造成当机器人清洁器从硬表面移动到可压缩表面时通过连杆从清洁表面升起。
18.但是,在专利文献4中,存在将清洁组件与主体连接的连杆具有结构复杂的问题。
技术实现要素:
19.技术问题
20.因此,为了消除这些问题,详细描述的一方面是提供一种包括清洁管嘴的机器人清洁器,使得通过使在行进位置从硬地板变为可压缩地板时清洁管嘴卡在可压缩地板表面上的现象最小化,通过减小刷子驱动部上的负荷,行进性能可被提高并且可允许的清洁时间可被延长。
21.详细描述的另一方面是提供一种包括清洁管嘴的机器人清洁器,使得通过使用用于清洁管嘴的上升/下降操作的连杆可以最小化异物的引入,并且提供了一种简单的结构。
22.详细描述的另一方面是提供一种包括清洁管嘴的机器人清洁器,使得在清洁管嘴的竖直上升/下降期间防止扭曲。
23.详细描述的另一方面是提供一种包括清洁管嘴的机器人清洁器,使得即使当连接在清洁管嘴和清洁器主体之间的抽吸流动路径正在移动时,在清洁管嘴的上升/下降期间,流动路径的形状也可被恒定地维持。
24.问题的解决方案
25.为了实现这些和其它优点,根据本发明的目的,如在此具体实施和广泛描述的,提供了一种机器人清洁器,所述机器人清洁器包括:清洁器主体,所述清洁器主体配备有控制单元和驱动轮,所述驱动轮的驱动由所述控制单元控制;清洁管嘴,所述清洁管嘴安装在所述清洁器主体的下部中向下开口的开口部分内部,并且被构造成根据所述清洁器主体在上面行进的清洁表面的高度的改变相对于所述清洁器主体上升或下降;多个上升/下降引导件,所述多个上升/下降引导件包括在所述清洁管嘴中并且被构造成引导所述清洁管嘴的上升或下降;以及多个支撑部分,所述多个支撑部分包括在所述清洁器主体中,并且被构造成分别支撑所述多个上升/下降引导件,使得所述多个上升/下降引导件分别穿过所述多个支撑部分,并且在向上或向下方向上移动。
26.在这种构造中,由于可压缩地板表面(例如地毯)的高度,清洁管嘴在被按压时相对于清洁器主体上升,从而解决了清洁管嘴卡在清洁表面上的问题,并提高了行进性能。
27.机器人清洁器还可以包括卡钩,所述卡钩设置成分别从所述多个上升/下降引导件的上端部突出,并且当多个上升/下降引导件下降使得所述清洁管嘴被悬挂在所述清洁器主体的上部上时,所述卡钩分别卡在所述多个支撑部分上。
28.在该构造中,上升/下降引导件可以被构造成引导清洁管嘴的上升或下降,并且被容纳在清洁器主体中,并且以悬挂在清洁器主体中的上部上的形式被支撑。因此,可以使灰尘、异物等的引入最小化,并且可以提供上升/下降引导件的简单结构。
29.机器人清洁器还可以包括:多个辅助上升/下降引导件,所述多个辅助上升/下降引导件包括在所述清洁管嘴中,布置在所述多个上升/下降引导件下方,并被构造成引导所述清洁管嘴的竖直上升或下降;以及多个引导件容纳单元,所述多个引导件容纳单元包括在所述清洁器主体中,与所述多个辅助上升/下降引导件的两个侧表面面接触,并且被构造成引导所述多个辅助上升/下降引导件的竖直上升或下降。
30.在该构造中,辅助上升/下降引导件可以竖直地引导清洁管嘴的上升或下降操作,以防止在清洁管嘴的上升或下降期间发生扭曲。
31.所述清洁管嘴可以包括被构造成容纳刷子模块的刷子容纳单元,并且所述多个辅助上升/下降引导件可以设置成从所述刷子容纳单元的上部突出。
32.所述清洁管嘴可以包括刷子模块,并且所述多个上升/下降引导件可以设置成分别从所述清洁管嘴的前部和后部在向上方向上突出,其中所述刷子模块插设在所述清洁管嘴的前部和后部之间。
33.所述清洁管嘴可以包括:管嘴基部,所述管嘴基部包括与所述开口部分连通的抽吸入口,并且包括分别位于所述管嘴基部的两端处的轴支撑部分,其中,所述轴支撑部分以能够旋转的方式在向下方向上支撑经由所述抽吸入口暴露的刷子模块;以及管嘴盖,所述管嘴盖联接到所述管嘴基部的上部以覆盖所述刷子模块。
34.所述管嘴盖可以包括:刷子容纳单元,所述刷子容纳单元被构造成在周向方向上覆盖并容纳所述刷子模块;以及凸缘单元,所述凸缘单元沿着所述刷子容纳单元的边缘延伸并且联接到所述管嘴基部,其中,所述多个上升/下降引导件设置成从所述凸缘单元的上表面突出,并且在所述刷子容纳单元的向前/向后方向上彼此间隔开地布置。
35.所述多个上升/下降引导件可以分别设置在所述清洁管嘴的左侧和右侧处,并且被构造成引导所述清洁管嘴的左侧和右侧的端部以独立地上升或下降。
36.所述机器人清洁器还可以包括管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴,并被构造成容纳所述清洁管嘴,其中,所述多个支撑部分在所述管嘴容纳单元中设置成在向上/向下方向上被穿透,使得所述多个支撑部分分别在向上方向上被所述多个上升/下降引导件穿透。
37.所述管嘴盖可以包括:刷子容纳单元,所述刷子容纳单元被构造成在周向方向上覆盖并容纳所述刷子模块;凸缘单元,所述凸缘单元沿所述刷子容纳单元的边缘延伸并联接到所述管嘴基部;以及辅助上升/下降引导件,所述辅助上升/下降引导件分别布置在所述多个上升/下降引导件下方,设置成从所述凸缘单元的前表面突出,并且被构造成引导所述清洁管嘴的竖直上升或下降。
38.机器人清洁器还可以包括管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴,并被构造成容纳所述清洁管嘴,其中,所述引导件容纳单元包括引导凹槽,所述多个辅助上升/下降引导件滑入所述引导凹槽中,并且所述多个引导件容纳单元设置成分别从所述管嘴容纳单元突出,以覆盖所述多个辅助上升/下降引导件。
39.所述清洁管嘴可以包括:刷子模块,所述刷子模块被构造成经由所述开口部分扫除所述清洁表面上的异物;抽吸引导件,所述抽吸引导件安装成在所述管嘴基部的下部中向下倾斜,并被构造成接收和升高由所述刷子模块扫除的异物;以及抽吸引导件保持器,所述抽吸引导件保持器联接到所述管嘴基部的下部以固定所述抽吸引导件,其中所述抽吸引
导件布置在所述管嘴基部的下部和所述抽吸引导件保持器之间。
40.所述机器人清洁器还可以包括:管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴;排放出口,所述排放出口设置在所述清洁管嘴的后部中,并且被构造成排放经由所述开口部分抽吸的异物;连通部,所述连通部设置在所述管嘴容纳单元的后部中以与所述排放出口连通;以及抽吸流动路径部,所述抽吸流动路径部被构造成将所述排放出口与所述连通部连通,并且包括弹性材料以弹性地支撑所述清洁管嘴,使得所述清洁管嘴能够上升或下降。
41.在这种构造中,抽吸流动路径可以包括弹性材料,是的即使当连接在清洁管嘴和清洁器主体之间的抽吸流动路径在移动时,在清洁管嘴的上升/下降期间,流动路径的形状可以被恒定地维持。
42.当所述清洁管嘴由于所述清洁表面的高度而升高时,所述抽吸流动路径部可以将所述清洁管嘴弹性地按压到所述清洁管嘴的原始位置。
43.所述抽吸流动路径部还可以包括紧固凸缘,所述紧固凸缘设置成从所述抽吸流动路径部的端部沿着周向方向在向外方向上突出,并且被紧固到所述连通部,其中,所述抽吸流动路径部延伸成从所述排放出口朝向后面方向突出。
44.所述清洁管嘴可以包括:刷子容纳单元,所述刷子容纳单元被构造成容纳刷子模块,所述刷子模块被构造成经由所述开口部分扫除所述清洁表面上的异物;以及刷子驱动部,所述刷子驱动部安装在所述刷子容纳单元的一侧的端部中,并且被构造成使所述刷子模块旋转。
45.所述机器人清洁器还可以包括管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴,并被构造成容纳所述清洁管嘴,其中,所述管嘴容纳单元还包括被所述刷子驱动部穿透的贯通部分,使得从所述刷子容纳单元的端部朝向所述管嘴容纳单元的外部突出的所述刷子驱动部能够随所述清洁管嘴上升或下降。
46.所述清洁管嘴可以包括抽吸流动路径部,所述抽吸流动路径部延伸成从所述刷子容纳单元的排放出口在后面方向上突出以排放异物,并且所述抽吸流动路径部被构造成弹性地支撑所述清洁管嘴以校正所述刷子驱动部上的不对称负荷。
47.所述抽吸流动路径部可以以闭环的形式设置。
48.所述抽吸流动路径部可以包括弹性材料,并且还可以包括加强部分,所述加强部分设置成使得厚度沿着所述抽吸流动路径部的靠近所述刷子驱动部的区段的内周进一步增加。
49.所述抽吸流动路径部可以包括弹性材料,并且还可以包括多个加强肋,所述多个加强肋沿着所述抽吸流动路径部的靠近所述刷子驱动部的区段的外周的表面彼此间隔开地布置,并且所述多个加强肋设置成在向外方向上突出。
50.还提供了一种机器人清洁器,所述机器人清洁器包括:清洁器主体,所述清洁器主体配备有控制单元和驱动轮,所述驱动轮的驱动由所述控制单元控制;清洁管嘴,所述清洁管嘴安装在所述清洁器主体的下部中向下开口的开口部分内部,并且被构造成根据所述清洁器主体在上面行进的清洁表面的高度的改变相对于所述清洁器主体上升或下降;管嘴容纳单元,所述管嘴容纳单元安装在所述清洁器主体中以覆盖所述清洁管嘴的上部;刷子模块,所述刷子模块安装成容纳在所述清洁管嘴中;刷子驱动部,所述刷子驱动部安装在所述
清洁管嘴的一侧的端部中,并被构造成驱动所述刷子模块;以及抽吸流动路径部,所述抽吸流动路径部将所述清洁管嘴连接到所述管嘴容纳单元,以抽吸由所述刷子模块扫除的异物,并且所述抽吸流动路径部被构造成弹性地支撑所述清洁管嘴以上升或下降,并校正所述刷子驱动部上的不对称负荷。
51.发明的有益效果
52.在下文中,将描述根据本公开的机器人清洁器的效果。
53.根据详细描述,多个上升/下降引导件可以设置在清洁管嘴的上部中以在向上方向上突出。多个支撑部分可以在管嘴容纳单元的上部上设置成被贯穿,管嘴容纳单元被构造成覆盖清洁管嘴的上部。上升/下降引导件穿过支撑部分以被支撑部分支撑,从而上升或下降。因此,根据地板之间的高度差,清洁管嘴可以从清洁器主体的下部中向下开口的开口部分上升或下降。因此,当清洁器主体从硬地板表面移向可压缩地板表面时,清洁管嘴卡在可压缩地板表面上的现象被最小化,因此,可以改善行进性能。另外,当刷子模块中的刷子在升高到可压缩地板表面上方的状态下旋转时,可以减小刷子模块的旋转阻力,因此,可以减小刷子驱动部上的负荷。刷子驱动部的功耗可以降低,因此,可允许的清洁时间可以延长。
54.另外,由于卡钩设置成从上升/下降引导件的上端部突出并卡在支撑部分上,所以清洁管嘴可以在悬挂在清洁器主体中的管嘴容纳单元的上部上的状态下被支撑。因此,卡钩可限制清洁管嘴的最低下降高度。
55.此外,辅助上升/下降引导件可以设置成分别从清洁管嘴的前表面和后表面突出,以被布置在上升/下降引导件下方。引导件容纳单元可设置成分别从管嘴容纳单元的前表面和后表面在向外方向上突出,以被布置在支撑部分下方。辅助上升/下降引导件可以沿着设置在引导件容纳单元内部的引导凹槽在向上/向下方向上被可滑动地支撑。因此,辅助上升/下降引导件可以在容纳在引导件容纳单元中的状态下向上或向下滑动,因此,可以稳定地支撑清洁管嘴的竖直上升/下降。另外,辅助上升/下降引导件和引导件容纳单元可以防止在清洁管嘴的竖直上升/下降期间的扭曲。
56.此外,引导件容纳单元的上端部设置成具有封闭结构,在该封闭结构中,引导凹槽的上端被封闭。因此,当辅助上升/下降引导件的上端部受到压力并由于地板的高度而升高时,辅助上升/下降引导件的最大上升高度可以由于引导件容纳单元的封闭结构而被限制。
57.均被构造成引导清洁管嘴的上升/下降操作的上升/下降引导件和辅助上升/下降引导件可以被布置在刷子容纳单元的上部上,该刷子容纳单元被布置在清洁器主体的上部内部中,以最小化异物的引入。另外,均被构造成支撑上升/下降引导件和辅助上升/下降引导件以向上或向下移动的支撑部分和引导件容纳单元分别具有简单的结构,因此,可以极大地有助于机器人清洁器的小型化和降低成本。
58.另外,被构造成抽吸由刷子模块扫除的异物等的抽吸流动路径部可延伸成从清洁管嘴的后部突出以连接到管嘴容纳单元。抽吸流动路径部包括弹性材料,并且可以弹性地支撑被构造成根据地板的高度而上升/下降的清洁管嘴。
59.另外,刷子驱动部可以安装在清洁管嘴的一侧处的端部中,以驱动容纳在清洁管嘴中的刷子模块。抽吸流动路径部还可以包括加强部分,该加强部分被构造成沿着抽吸流动路径部的定位成靠近刷子驱动部或构成突出部分的周边增加厚度。因此,可以校正刷子
驱动部上的不对称负荷。
附图说明
60.图1是示出清洁管嘴组件安装在根据本公开的机器人清洁器内部的状态的立体图。
61.图2是示出图1的清洁管嘴组件被拆卸的状态的概念图。
62.图3是示出从后面方向观察的图1的清洁管嘴组件的后视立体图。
63.图4是示出图3的清洁管嘴组件被拆卸的状态的分解图。
64.图5是示出从后面方向观察的图4的清洁管嘴的概念图。
65.图6是图5的沿线vi-vi截取的截面图。
66.图7是图6的沿线vii-vii截取的截面图。
67.图8是示出当本公开中的机器人清洁器在硬地板上行进时上升/下降引导件的位置的概念图。
68.图9是示出当本公开中的机器人清洁器在诸如地毯的可压缩地板上行进时上升/下降引导件的位置的概念图。
69.图10是示出根据本公开的另一实施方式的清洁管嘴的概念图。
70.图11是图10的沿线xi-xi截取的截面图。
71.图12是示出根据本公开的抽吸流动路径部的另一方面的概念图。
72.图13是示出根据本公开的清洁管嘴的另一方面的概念图。
具体实施方式
73.在下文中,将参考附图详细描述本文公开的实施方式,并且相同或相似的元件用相同的附图标记指代,而不管附图中的附图标记,并且将省略它们的冗余描述。通常,诸如“模块”和“单元”的后缀可以用于指代元件或部件。本文中使用此类后缀仅旨在便于说明书的描述,并且后缀本身并不旨在给出任何特殊含义或功能。在描述本公开时,如果对相关的已知技术或构造的详细解释被认为不必要地转移本公开的主旨,则这种解释已经被省略,但是将被本领域技术人员理解。附图用于帮助容易地理解本公开的技术思想,并且应当理解,本公开的构思不受附图限制。本公开的构思应当被解释为延伸到除了附图之外的任何改变、等同物和替代物。
74.将理解的是,尽管术语第一、第二等在本文中可用于描述各种元件,但这些元件不应受这些术语限制。这些术语通常仅用于将一个元件与另一个元件区分开。
75.将理解的是,当元件被称为与另一元件“连接”时,元件可以与另一元件连接,或者也可以存在中间元件。相反,当元件被称为与另一元件“直接连接”时,不存在中间元件。
76.单数表示可以包括复数表示,除非其表示与上下文明确不同的含义。
77.在本文中使用诸如“包括”或“具有”的术语,并且应当理解,它们旨在指示在说明书中公开的若干部件、功能或步骤的存在,并且还应当理解,同样可以利用更多或更少的部件、功能或步骤。
78.图1是示出清洁管嘴110的组件安装在根据本公开的机器人清洁器内部的状态的立体图。
79.图2是示出图1的清洁管嘴110的组件被拆卸的状态的概念图。
80.图3是示出从后面方向观察的图1的清洁管嘴110的组件的后视立体图。
81.图4是示出图3的清洁管嘴110的组件被拆卸的状态的分解图。
82.图5是示出从后面方向观察图4的清洁管嘴110的状态的概念图。
83.图6是图5的沿线vi-vi截取的截面图。
84.图7是图6的沿线vii-vii截取的截面图。
85.机器人清洁器被构造成执行在特定区域中自主地行进的同时清洁地板的功能。这里,地板的清洁可以被理解为包括在地板上抽吸异物和灰尘或者拖扫地板。
86.在该示例中,机器人清洁器被构造成执行真空清洁功能,即在特定区域中自主地行进的同时从地板抽吸空气并且通过将灰尘与来自抽吸的空气的异物分离来收集灰尘。
87.机器人清洁器被构造成包括清洁器主体100。清洁器主体100提供机器人清洁器的外观。包括被构造成控制机器人清洁器的控制单元的各种部件配备有清洁器主体100或安装在清洁器主体100中。
88.在清洁器主体100中,可以布置有构成控制单元的电路基板(未示出)。各种模块,例如刷子模块123或拖把模块(未示出)可拆卸地联接到清洁器主体100。
89.驱动轮101(参考图13)设置在清洁器主体100的下表面上。驱动轮101被构造成通过从轮驱动马达1011接收驱动动力而旋转。轮驱动马达1011可从控制单元接收控制信号以控制轮驱动马达1011的驱动。
90.驱动轮101可以分别设置在清洁器主体100的下表面上的左侧和右侧处。轮驱动马达1011可以连接到驱动轮101中的每一个,以便独立地驱动每个驱动轮101。
91.清洁器主体100可根据驱动轮101的旋转在左、右、向前或向后方向上移动或旋转。
92.辅助轮1012(参考图13)可以进一步设置在清洁器主体100的下表面上。辅助轮1012可以与驱动轮101的不同之处在于辅助轮1012仅具有在地板上滚动的功能。
93.辅助轮1012可与驱动轮101一起支撑清洁器主体100。辅助轮1012被构造成辅助清洁器主体100的行进。
94.多个辅助轮1012可以参考在侧方向上穿过多个驱动轮101的中心的中心线可旋转地安装在清洁器主体100的前部和后部的相应中心处。
95.被构造成向机器人清洁器供电的电池(未示出)安装在清洁器主体100中。电池可以被构造成是可再充电的,并且可以可拆卸地附接到清洁器主体100的下表面部分。
96.感测单元(未示出)可以布置在清洁器主体100的前部中。感测单元可以定位在距清洁器主体100的前表面的恒定的高度处。
97.感测单元可以被构造成检测清洁器主体100前面的障碍物、地理特征等,使得清洁器主体100不与障碍物碰撞。
98.当机器人清洁器被构造成执行真空清洁功能时,包括灰尘和异物的空气可以穿过设置在清洁器主体100的下部中的开口部分102被抽吸。
99.可以设置开口部分102以参考清洁器主体100的行进方向沿着左/右方向延伸。开口部分102可以设置成具有矩形形状。开口部分102可设置成在向上/向下方向上穿过清洁器主体100的下表面。
100.被构造成清洁地板表面上的灰尘和异物的清洁管嘴110设置在开口部分102内部。
101.管嘴容纳单元104设置在清洁器主体100的开口部分102中。管嘴容纳单元104安装在清洁器主体100的下表面上,以覆盖开口部分102。管嘴容纳单元104可以参照清洁器主体100的行进方向在左/右方向上延伸。
102.管嘴容纳单元104在其中包括容纳空间以容纳清洁管嘴110。管嘴容纳单元104的下部设置成在向下方向上开口。管嘴容纳单元104被构造成覆盖清洁管嘴110的上部。
103.多个凸台103可以沿着开口部分102的周边在向前/向后方向和左/右方向上彼此间隔开地布置,以将管嘴容纳单元104紧固到清洁器主体100。多个凸台103可以以圆柱形形式设置成在向上方向上突出。
104.紧固凹槽可以分别设置在多个凸台103内部。
105.多个紧固单元1041可分别在管嘴容纳单元104的前端表面和后端表面上布置成在左/右纵向方向上彼此间隔开并且在向前/向后方向上突出。紧固凹槽可以设置在紧固单元1041内部。
106.诸如螺钉的紧固构件穿过紧固单元1041以被紧固到多个凸台103,从而将管嘴容纳单元104紧固到清洁器主体100。
107.清洁管嘴110被构造成在其中容纳刷子模块123。清洁管嘴110可被构造成包括管嘴盖111和管嘴基部116。
108.管嘴盖111可以包括刷子容纳单元112和凸缘单元114。
109.刷子容纳单元112可以设置成具有空的圆柱形形式。刷子容纳单元112在其中包括容纳空间以容纳刷子模块123。刷子容纳单元112的圆柱形结构可以使被抽吸到刷子容纳单元112中的空气的流阻最小化。
110.刷子模块123包括刷子,该刷子附接到刷子主体的外周表面,该刷子主体具有圆柱形形式,并且被构造成使刷子旋转以将灰尘和异物扫除远离地板。
111.刷子容纳单元112的底部开口以通过刷子模块123的底部朝向地板表面暴露刷子模块123。刷子模块123可以可旋转地安装在清洁管嘴110内部。
112.旋转轴设置成在轴的方向上在刷子模块123的两端处突出,并且刷子模块123被构造成参考旋转轴旋转。
113.刷子驱动部124安装在刷子容纳单元112的一侧的端部处。刷子驱动部124可以包括被构造成驱动刷子模块123的刷子马达125,以及被构造成将刷子马达125的动力输送到刷子模块123的齿轮箱126。
114.齿轮箱126可以在其中包括多个齿轮。齿轮箱126可被构造成将刷子马达125连接到刷子模块123。
115.齿轮箱126布置在刷子容纳单元112的端部的侧表面上,并且齿轮箱126的一侧可以联接到刷子模块123的旋转轴以输送动力。刷子模块123的旋转轴可以穿过刷子容纳单元112的端部以联接到刷子模块123。
116.刷子驱动部124可以被构造成朝向管嘴容纳单元104的外部突出。贯通部分108可在管嘴容纳单元104的一侧处设置成在向上/向下方向上被穿透其中。管嘴容纳单元104可经由贯通部分108被刷子驱动部124穿透。
117.在该构造中,刷子驱动部124可以配备在清洁管嘴110的一个端部中,并且穿过管嘴容纳单元104中的贯通部分108,以与清洁管嘴110一起上升或下降。
118.刷子模块123可通过从刷子驱动部124接收动力而旋转,以将灰尘和异物扫除远离地板。
119.通过刷子模块123抽吸的空气中的灰尘和异物被过滤并收集在灰尘容器127中。从灰尘和异物分离的空气被排放到清洁器主体100的外部。
120.抽吸流动路径部136和排气流动路径(未示出)可以设置在清洁器主体100内部,抽吸流动路径部136被构造成将经由开口部分102引入的空气引导到灰尘容器127,并且排气流动路径被构造成引导空气从灰尘容器127到清洁器主体100的外部的流动。
121.抽吸流动路径部136可以延伸成从刷子容纳单元112的后部朝向灰尘容器127突出。抽吸流动路径部136可以被连接以与设置在灰尘容器127的前表面上的入口连通。
122.灰尘容器127可以可拆卸地容纳在清洁器主体100内部。
123.灰尘容器127可设置有用于过滤抽吸的空气中的灰尘和异物的过滤器和旋风器中的至少一者。
124.凸缘单元114设置在刷子容纳单元112的下端部中。凸缘单元114设置成沿着刷子容纳单元112的下端的周边朝向向外方向突出。凸缘单元114可以设置成具有矩形形状。
125.管嘴基部116可设置成对应于开口部分102。管嘴基部116可以略小于开口部分102。
126.管嘴基部116可以被构造成紧固到管嘴盖111的下部。管嘴基部116可以紧固到凸缘单元114。管嘴基部116可以布置成在向上/向下方向上与凸缘单元114重叠。
127.管嘴基部116可以设置成具有闭环矩形形状。
128.抽吸入口121可以设置在管嘴基部116中。抽吸入口121可以设置成与开口部分102连通。清洁器主体100在其上行进的清洁表面的周边外部的空气可经由抽吸入口121被抽吸到刷子容纳单元112中。
129.多个轴支撑部分122可设置成在纵向方向上从管嘴基部116的两侧的端部轴向突出。
130.多个轴支撑部分122可被构造成支撑从刷子模块123的两端突出的旋转轴。旋转轴的两个端部可分别由轴承可旋转地支撑。轴支撑部分122可以设置成具有在向下方向上凹陷的弯曲表面的形式。
131.管嘴基部116的前部的高度可以小于管嘴基部116的后部的高度。
132.多个倾斜表面可以设置在管嘴基部116的左侧表面部分和右侧表面部分中。倾斜表面可以设置成从管嘴基部116的前侧表面部分向下倾斜到后侧表面部分。倾斜表面可设置在轴支撑部分122下方。
133.管嘴基部116的前部的下端和管嘴基部116的后部的下端(其间具有高度差)可以通过倾斜表面彼此连接。
134.管嘴基部116的后部可以粘附到地板表面,并且可以在管嘴基部116的前部的下端和地板表面之间设置间隙。
135.在该构造中,即使当管嘴基部116的后部粘附到地板表面时,清洁器主体100的前部的外部的空气也可以经由间隙平稳地被抽吸到抽吸入口121中。
136.为了将管嘴盖111紧固到管嘴基部116,可以设置多个紧固突起117以在前后方向上从管嘴基部116的前部的前表面和后部的后表面突出。
137.紧固突起117中的每一个可以设置成具有在管嘴基部116的纵向方向上延伸的矩形形状。紧固突起117可以在管嘴基部116的左/右纵向方向上彼此间隔开地布置。
138.多个紧固孔115可以在凸缘单元114的前部和后部中设置成在向前/向后方向上被穿透。多个紧固孔115可设置成分别对应于多个紧固突起117,使得紧固突起117可与紧固孔115匹配。
139.紧固突起117可设置成具有在向前/向后方向上向下倾斜的楔形形式。因此,当管嘴基部116被插入到凸缘单元114中时,紧固突起117可以容易地组装到紧固孔中。
140.抽吸引导件134可以安装在管嘴基部116的下部中。
141.抽吸引导件134用作被构造成将由刷子模块123扫除的异物支撑并升高到刷子容纳单元112中的簸箕(dustpan)。
142.抽吸引导件134可以布置在管嘴基部116的后部中。
143.抽吸引导件134可以设置成在管嘴基部116的左/右方向上延伸并且具有小厚度的平板的形式。
144.与抽吸引导件134的后端部的位置相比,抽吸引导件134的前端部设置成倾斜以定位在较低的高度处。这是为了保持抽吸引导件134的前端部尽可能靠近地板表面,从而将前端部推动和升高到抽吸入口121的内部上方。
145.抽吸引导件134的一部分可以安装到管嘴基部116中以经由管嘴基部116的抽吸入口121在向下方向上突出。
146.固定部分1341可以设置在抽吸引导件134的后端部中以在后面方向上突出。固定部分1341可以在抽吸引导件134的纵向方向上水平地延伸。
147.多个装配孔1342可以设置在固定部分1341中以在向上/向下方向上被穿透。装配孔1342可以在固定部分1341的纵向方向上彼此间隔开地布置。装配孔1342可以具有窄的宽度并且设置成在固定部分1341延伸的方向上延伸。
148.突出端部1343可以设置在抽吸引导件134的下表面上以在向下方向上突出。突出端部1343可以在抽吸引导件134的纵向方向上延伸。
149.抽吸引导件保持器135包括在管嘴基部116内部,以将抽吸引导件134固定到管嘴基部116内部的后部。
150.抽吸引导件保持器135可以包括前保持器部分1351和后保持器部分1353。
151.前保持器部分1351和后保持器部分1353在它们之间可以具有一定的角度,并且在左/右侧方向上延伸成具有对应于抽吸引导件134的长度。
152.前保持器部分1351可以从后保持器部分1353的前端部向下倾斜到抽吸引导件134的后端部,并且具有弯曲表面的形式。
153.前保持器部分1351可以布置在刷子容纳单元112的下端和抽吸引导件134的后端之间。刷子容纳单元112、前保持器部分1351和抽吸引导件134可以布置成在周向方向上彼此重叠,并且具有一个圆弧的截面形状。
154.在该构造中,由刷子模块123扫除的异物可以沿着抽吸引导件134和前保持器部分1351被平稳地升高到抽吸入口121的内部上方,而不被卡住。
155.多个固定孔118可以在管嘴基部116的后部中设置成在向上/向下方向上被穿透。固定孔118可以在管嘴基部116的左/右侧方向上彼此间隔开地布置。固定孔118中的每一个
可以设置成具有窄的宽度并且具有在左右侧方向上延伸的长度。
156.多个固定突起1352可以设置成在向下方向上从前保持器部分1351的下表面突出。固定突起1352可以在前保持器部分1351的左/右侧方向上彼此间隔开地布置。
157.后保持器部分1353可以被布置成在向上/向下方向上与管嘴基部116的后部的其中设置有固定孔118的部分重叠。
158.固定突起1352、装配孔1342和固定孔118可以被布置成在向上/向下方向上彼此重叠。
159.固定突起1352通过穿透装配孔1342和固定孔118而装配并联接到装配孔1342和固定孔118。因此,前保持器部分1351可以在向下方向上在抽吸引导件134中推动固定部分1341,以将固定部分1341固定到管嘴基部116。
160.卡口(catching jaw)1211可设置在管嘴基部116的开口部分102的后端处。卡口1211可被布置在固定孔118的前面。卡口1211可构成开口部分102的后端并且被布置成具有沿向上方向的竖直高度。
161.抽吸引导件134的突出端部1343布置在卡口1211的前表面上,以与卡口1211的前表面面接触,以防止抽吸引导件134的前端部在向下方向上旋转或防止固定部分1341在向上方向上升高。
162.当经由装配孔1342和固定孔118,将固定突起1352装配并联接到装配孔1342和固定孔118时,固定部分1341可以稳定地安置在管嘴基部116的内侧表面中并固定到管嘴基部116的内侧表面。
163.后保持器部分1353可以从前保持器部分1351的后端水平地延伸到后面方向。
164.多个联接孔1354可设置成在向上/向下方向上被穿透以将后保持器部分1353紧固到管嘴基部116的后部。联接孔1354可以在后保持器部分1353的纵向方向上彼此间隔开地布置。
165.多个联接凸台119可设置成在向上方向上从管嘴基部116的内侧表面突出,以将后保持器部分1353紧固到管嘴基部116。联接凸台119可以在管嘴基部116的纵向方向上彼此间隔开地布置。
166.联接孔1354和联接凸台119布置成在向上/向下方向上彼此重叠。
167.诸如螺钉的联接构件穿过联接孔并且螺纹紧固到设置在联接凸台119中的紧固凹槽中,以将后保持器部分1353紧固到管嘴基部116。
168.在该构造中,抽吸引导件保持器135可以使用固定突起1352和固定孔118将抽吸引导件134牢固地紧固到管嘴基部116内部的后部。
169.在抽吸引导件134安装在管嘴基部116的抽吸入口121中时的状态下,抽吸引导件保持器135可以紧固到抽吸入口121的内部,从而支撑抽吸引导件134。
170.多个正确位置引导件120可以被构造成将抽吸引导件保持器135引导到管嘴基部116中的正确位置,并且设置成在向上方向上从管嘴基部116内部的后部突出。
171.正确位置引导件120可以设置成具有前部以及左侧和右侧封闭并且后部开口的结构,即,呈
“”
的形式。
172.多个正确位置引导件容纳孔1355可以设置成在向上/向下方向上被穿透,以将正确位置引导件120容纳在后保持器部分1353的下表面上。
173.正确位置引导件容纳孔1355和正确位置引导件120可以被布置成在向上/向下方向上彼此重叠。
174.当正确位置引导件120被插入正确位置引导件容纳孔1355中并与正确位置引导件容纳孔1355匹配时,后保持器部分1353中的联接孔1354和管嘴基部116中的联接凸台119可设置成在向上/向下方向上彼此重叠,从而改进组装特性。
175.清洁管嘴110可以安装成在从硬地板1行进到诸如地毯10等的可压缩地板的同时根据地板高度的改变而相对于清洁器主体100上升或下降。
176.清洁管嘴110可以在第一位置和第二位置之间执行上升或下降操作。
177.第一位置是初始位置,并且清洁管嘴110的初始位置可以被设定为适合硬地板1。
178.第二位置位于高于第一位置。第二位置是当清洁器主体100在诸如地毯10等的可压缩地板上行进时,清洁管嘴110根据可压缩地板的高度上升到的位置。
179.清洁管嘴110可以由多个上升/下降引导件128和多个支撑部分130支撑,以便以悬挂在清洁器主体100的上部内部上的形式上升或下降。
180.例如,清洁管嘴110可以被支撑为以悬挂在管嘴盖111的上部上的形式上升或下降。
181.上升/下降引导件128可以设置成在向上方向上从刷子容纳单元112的上部突出。
182.上升/下降引导件128可以在刷子容纳单元112的纵向方向上彼此间隔开地布置。
183.上升/下降引导件128可以设置成具有矩形形状,该矩形形状具有窄宽度和在竖直方向上比宽度更大的高度。上升/下降引导件128可以具有薄板形状并且在刷子容纳单元112的向前/向后方向上延伸。
184.上升/下降引导件128中的每一个可以在竖直方向上向上或向下延伸。
185.上升/下降引导件128的厚度可以设置成小于上升/下降引导件128在竖直方向上的高度和上升/下降引导件128在左/右侧方向上的宽度。
186.支撑部分130设置在管嘴容纳单元104的上部中。支撑部分130可以在管嘴容纳单元104的上部中设置成在向上/向下方向上被分别穿透。支撑部分130可以被布置成在上升/下降引导件128的突出方向上与上升/下降引导件128重叠。
187.支撑部分130可以设置成具有与上升/下降引导件128的形状相同的形状,以覆盖上升/下降引导件128的左表面、右表面、前表面、后表面和侧表面。
188.上升/下降引导件128可以穿过支撑部分130以被支撑部分130支撑以在向上/向下方向上移动。
189.卡钩129设置在上升/下降引导件128的上端部上以在向外方向上突出。卡钩129设置成使得上升/下降引导件128的上端部被卡在管嘴容纳单元104的上部上。
190.卡钩129设置成被卡在支撑部分130上。
191.在该构造中,上升/下降引导件128可以穿过支撑部分130以从第一位置(初始位置)上升到第二位置(上升位置)。在这种情况下,支撑部分130引导上升/下降引导件128的上升和下降操作。
192.此外,当上升/下降引导件128从第二位置(上升位置)下降到第一位置(初始位置)时,卡钩129被卡在支撑部分130上。在这种情况下,卡钩129可限制清洁管嘴110的初始位置(最低位置)。
193.支撑部分130可以从管嘴容纳单元104的下端在向上方向上定位在管嘴容纳单元104的最上端处。
194.然而。支撑部分130的位置不限于此,并且可以从管嘴容纳单元104的下端在向上方向上定位在管嘴容纳单元104的恒定高度处。
195.上升/下降引导件128的位置不限于刷子容纳单元112的最上端,并且可以布置在刷子容纳单元112的前部和后部中。替代地,上升/下降引导件128可以设置在凸缘单元114的上部的前表面和后表面上。
196.多个支撑件可以设置成分别从管嘴容纳单元104的前部和后部在向前/向后方向上突出。
197.支撑件可以设置成分别从管嘴容纳单元104的前部和后部突出。
198.支撑件中的第一支撑件106可以朝向管嘴容纳单元104的前部突出。
199.支撑件中的第二支撑件107可以朝向管嘴容纳单元104的后部突出。
200.第一支撑件106和第二支撑件107可以朝向管嘴容纳单元104的左/右侧方向延伸。
201.第一支撑件106和第二支撑件107的上表面中的每一个可以设置成从管嘴容纳单元104的下端在向上方向上的恒定高度处具有平坦表面的形状。
202.为了辅助清洁管嘴110的上升和下降操作,多个辅助上升/下降引导件131可以被包括在凸缘单元114中。
203.辅助上升/下降引导件131可以设置成分别在向前/向后方向上从凸缘单元114的前表面和后表面突出。
204.辅助上升/下降引导件131可以分别在左/右侧方向上在凸缘单元114的前表面和后表面上彼此间隔开地布置。
205.辅助上升/下降引导件131可以分别相对于凸缘单元114的前表面和后表面在向外方向上竖直地突出。此外,辅助上升/下降引导件131可以在凸缘单元114的高度方向上竖直地延伸。
206.多个引导件容纳单元132可以设置成分别从第一支撑件106的前表面和第二支撑件107的后表面突出。引导件容纳单元132可以在支撑件的纵向方向上彼此间隔开地布置。
207.引导凹槽133可以在引导件容纳单元132中设置成使得辅助上升/下降引导件131可以可滑动地移动。引导凹槽133设置成覆盖辅助上升/下降引导件131。
208.引导凹槽133的竖直高度可以设置成大于辅助上升/下降引导件131的竖直高度。
209.引导件容纳单元132可以设置成使得引导凹槽133的上端被封闭。
210.引导凹槽133的竖直高度可以限制辅助上升/下降引导件131的最大可滑动高度。
211.引导凹槽133的上端的高度可以限制辅助上升/下降引导件131的最大高度,以及上升/下降引导件128的最大可上升高度和清洁管嘴110的最大可上升高度。
212.在下文中,描述了上升/下降引导件128和辅助上升/下降引导件131的功能和效果,该上升/下降引导件128和辅助上升/下降引导件131均被构造成引导根据本公开的清洁管嘴110的上升和下降操作。
213.图8是示出当本公开中的机器人清洁器在硬地板1上行进时上升/下降引导件128的位置的概念图。
214.图9是示出当本公开中的机器人清洁器在诸如地毯10等可压缩地板上行进时上
升/下降引导件128的位置的概念图。
215.机器人清洁器可以在硬地板1或诸如地毯10等的可压缩地板上行进。
216.当机器人清洁器在硬地板1上行进时,由驱动轮101按压的地板1具有与由清洁管嘴110清洁的清洁表面的高度相同的高度。
217.然而,当机器人清洁器在诸如地毯10等的可压缩地板上行进时,由驱动轮101按压的可压缩地板具有与由清洁管嘴110清洁的清洁表面的高度不同的高度。
218.由于地毯10包括纺织品材料,当驱动轮101按压地毯10时,清洁表面的高度大于由驱动轮101按压的地板的高度。根据清洁表面的高度在向上方向上按压清洁管嘴110的下表面。
219.当机器人清洁器穿过不同地板环境之间的边界线以从硬地板1移向可压缩地板时,清洁管嘴110可以根据清洁表面的压力升高。
220.定位在管嘴盖111或刷子容纳单元112的上端处的上升/下降引导件128引导清洁管嘴110的上升操作。
221.上升/下降引导件128可通过穿过可穿透地设置在管嘴容纳单元104的最上端处的支撑部分130而突出和升高。
222.支撑部分130可以允许上升/下降引导件128的上升,但是限制上升/下降引导件128的左、右、向前或向后移动。
223.因此,清洁管嘴110可以由上升/下降引导件128和支撑部分130支撑,并且从初始位置(第一位置)上升到高于第一位置的第二位置。
224.此外,辅助上升/下降引导件131可以设置在清洁管嘴110、管嘴盖111或凸缘单元114的左、右、前部或后部中,以引导清洁管嘴110的竖直上升操作。
225.辅助上升/下降引导件131可以布置在低于上升/下降引导件128的位置的位置,并且在清洁管嘴110中对上升/下降引导件128进行辅助。
226.辅助上升/下降引导件131可以从凸缘单元114的前表面和后表面突出,并且被容纳在引导件容纳单元132中的引导凹槽133中,该引导件容纳单元132被布置在管嘴容纳单元104的左、右、前部或后部中,并且在向上/向下方向上可滑动地布置,以沿着引导凹槽133向上滑动。
227.引导件容纳单元132设置成具有大于辅助上升/下降引导件131的竖直高度的竖直高度。当设置在引导件容纳单元132中的引导凹槽133的上端被封闭时,辅助上升/下降引导件131的最大上升高度可以被限制。
228.另一方面,当机器人清洁器穿过不同地板环境之间的边界线以从可压缩地板移向硬地板1时,清洁表面的高度变为与硬地板1的高度相同。因此,当清洁表面上的压力减轻时,清洁管嘴110可下降到原始位置。
229.在这种情况下,当设置在上升/下降引导件128的上端上的卡钩129被卡在支撑部分130上时,清洁管嘴110在悬挂在管嘴容纳单元104的最上端上的状态下被支撑。因此,清洁管嘴110的最低位置可以被恒定地维持。
230.图10是示出根据本公开的另一实施方式的清洁管嘴210的概念图。
231.图11是图10的沿线xi-xi截取的截面图。
232.在本实施方式中,多个上升/下降引导件228可以延伸成分别从清洁管嘴210的前
部和后部向上突出。
233.多个支撑部分230可以设置在管嘴容纳单元204的上表面上以在向上/向下方向上被穿透。支撑部分230可以从管嘴容纳单元204的上表面在向前/向后方向或左/右侧方向上彼此间隔开地布置。
234.上升/下降引导件228可以通过分别穿过支撑部分230而被支撑以上升或下降,以引导清洁管嘴210上升或下降。
235.卡钩229可以设置成分别在向外方向上从上升/下降引导件228的上部突出。卡钩229可以被卡在支撑部分230上以限制上升/下降引导件228的最小下降高度。卡钩229可以在当清洁管嘴210使用上升/下降引导件228悬挂在清洁器主体100中的管嘴容纳单元204的上侧上时的状态下被支撑。
236.抽吸流动路径部236可以设置成将清洁管嘴210的排放出口113连接到管嘴容纳单元204的连通部209。
237.紧固凸缘237可以分别包括在抽吸流动路径部236的一侧和另一侧处。紧固凸缘237还可以在抽吸流动路径部236的两个端部处沿着抽吸流动路径部236的周边在向外方向上延伸。
238.紧固凸缘237的厚度可以大于抽吸流动路径部236的厚度。
239.设置在抽吸流动路径部236的一侧处的紧固凸缘237紧固到清洁管嘴210的排放出口113(参考图5)。设置在抽吸流动路径部236的另一侧处的另一紧固凸缘237紧固到管嘴容纳单元204的连通部209。
240.凸缘固定槽1091可设置在连通部209的周边中,以将紧固凸缘237紧固到连通部209。凸缘固定槽1091(参考图6)可以具有与紧固凸缘237的形状相同的形状。
241.固定突起1371(参照图6)设置成分别从紧固凸缘237的外侧端和内侧端突出,并且被插入到凸缘固定槽1091中并与凸缘固定槽1091结合(参考图6)以固定到凸缘固定槽1091。
242.替代地,紧固凹槽可以沿着紧固凸缘237的周边凹入地设置,使得紧固凸缘237被插入排放出口113(参考图5)或连通部209中并固定到排放出口113或连通部209。
243.抽吸流动路径部236包括弹性材料,并且可以弹性地支撑清洁管嘴210以在清洁管嘴210上升时上升。抽吸流动路径部236可以具有可调节的长度,并且设置成能够以可折叠形式或波纹管的形式拉伸。
244.抽吸流动路径部236可以以闭环的形式设置。抽吸流动路径部236的闭环可以包括在竖直方向上彼此间隔开地布置的多个管线部分2361和在左/右侧方向上彼此间隔开地布置以将管线部分2361彼此连接的多个弯曲管线部分2362。
245.管线部分2361可以以平坦表面的形式设置。弯曲管线部分2362可以以具有圆弧形状的弯曲表面的形式设置。
246.抽吸流动路径部236的端部可被连接以与清洁管嘴210中的排放出口113连通。抽吸流动路径部236的另一端部可以被连接以与管嘴容纳单元204中的连通部209连通。
247.抽吸流动路径部236的两个端部可分别紧固到清洁管嘴210和管嘴容纳单元204,并且设置成具有较大的厚度。紧固凹槽可以沿着抽吸流动路径部236的两个端部中的每一个的周边设置。当清洁管嘴210的排放出口113和管嘴容纳单元204中的连通部209装配到紧
固凹槽中时,抽吸流动路径部236可以牢固地紧固到清洁管嘴210和管嘴容纳单元204,以保持气密性。
248.抽吸流动路径部236可被构造成校正安装在清洁管嘴210的一侧处的端部中的刷子驱动部224上的不对称负荷。
249.抽吸流动路径部236可以在清洁管嘴210的后表面和管嘴容纳单元204的后表面之间倾斜地布置。
250.抽吸流动路径部236可被构造成校正安装在清洁管嘴210的一侧处的端部中的刷子驱动部224上的不对称负荷。
251.为此,抽吸流动路径部236可以包括流动路径主体和加强部分238。
252.加强部分238可以与抽吸流动路径部236一体地设置,并且具有与抽吸流动路径部236的弹性材料相同的弹性材料。
253.加强部分238在沿着流动路径主体的内周的一个区段中可以具有大的厚度。
254.在布置有加强部分238的开始部分中,倾斜部分可以设置成使得加强部分238的厚度逐渐增加。
255.加强部分238可以布置成与刷子驱动部224相邻。
256.例如,当从后面方向观察设置在清洁管嘴210的后部中的抽吸流动路径部236时,刷子驱动部224可以布置在清洁管嘴210的右端部处。
257.在加强部分238中,当在抽吸流动路径部236的向上/向下竖直方向上面向彼此的两个管线部分2361被分成三个区段时,区段对应于两个管线部分2361的整个长度的1/3并且朝向并邻近刷子驱动部224布置,并且连接到区段的弯曲管线部分2362的右侧部分可具有比对应于两个管线部分2361的整个长度的2/3的其它区段和弯曲管线部分2362的左侧部分的厚度大的厚度。
258.在该构造中,与刷子驱动部224相邻布置的抽吸流动路径部236的一侧处的强度通过加强部分238增加。因此,可以校正刷子驱动部224上的不对称负荷。也就是说,由于刷子驱动部224上的不对称负荷,与清洁管嘴210的另一端相比,加强部分238可以使清洁管嘴210的一侧在向下方向上的倾斜最小化。
259.其它构造的描述与参考图1至图9描述的实施方式相同或类似,因此这里将不提供。
260.图12是示出根据本公开的抽吸流动路径部236的另一方面的概念图。
261.在本实施方式中,抽吸流动路径部236包括多个突出部分239,以校正刷子驱动部224上的不对称负荷。因此,本实施方式中的抽吸流动路径部236不同于参考图11描述的抽吸流动路径部236。
262.突出部分239可以设置在抽吸流动路径部236的外周的一个区段中。突出部分239可以在抽吸流动路径部236的管线部分2361的右1/3区段中彼此间隔开地布置成与刷子驱动部224相邻。突出部分239之间的空间可以设置成彼此不同。
263.例如,当突出部分239远离弯曲管线部分2362时,突出部分239之间的空间可以是窄的。
264.这是因为抽吸流动路径部236的管线部分2361在抽吸流动路径部236的管线部分2361的中心部分处与位于弯曲管线部分2362处相比,受重力影响比受弯曲管线部分2362的
支撑力影响程度更大。因此,通过在远离弯曲管线部分2362的管线部分2361的一部分中设置许多突出部分239,可以补偿弯曲管线部分2362的支撑力的减小。
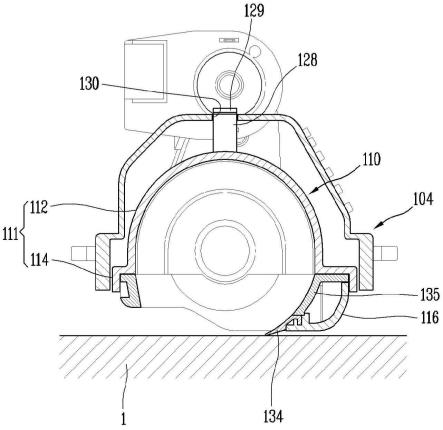
265.图13是示出根据本公开的清洁管嘴320的另一方面的概念图。
266.在本实施方式中,清洁管嘴320的一部分从清洁器主体300的前表面向外突出。因此,本实施方式与上面参照图1至图9描述的实施方式不同。
267.清洁器主体300可以设置成具有圆柱形形式。
268.清洁管嘴320可被构造成在向外方向上从清洁器主体300的前表面突出。
269.被构造成容纳清洁管嘴320的管嘴容纳单元310可设置成在向外方向上从清洁器主体300的前表面突出。管嘴容纳单元310可以延伸成在左/右侧方向上从清洁器主体300的下部前部突出。
270.感测单元301可以设置成在向外方向上从清洁器主体300的上部前部突出。感测单元301可以被布置成在向上/向下方向上与清洁管嘴320重叠。
271.感测单元301可以布置在管嘴容纳单元310的上部中。
272.感测单元301被构造成检测管嘴容纳单元310前面的障碍物、地理特征等,使得管嘴容纳单元310不与障碍物碰撞。感测单元301可以使用超声传感器等来实现。
273.清洁器主体300可以包括灰尘容器容纳单元324。灰尘容器容纳单元324可以可拆卸地联接到灰尘容器323,该灰尘容器323被构造成从抽吸的空气分离和收集灰尘。
274.灰尘容器容纳单元324可以设置在清洁器主体300的后部中。灰尘容器容纳单元324可以具有朝向清洁器主体300的后部开口的形式。灰尘容器容纳单元324可以设置成从清洁器主体300的后部向前部凹陷。
275.灰尘容器323的一部分可以容纳在灰尘容器容纳单元324中,并且灰尘容器323的另一部分可以设置成朝向清洁器主体300的后部突出。
276.灰尘容器323的盖可以设置在灰尘容器323的上部中。灰尘容器323的盖的前端部可以铰接到清洁器主体300中的灰尘容器容纳单元324,使得灰尘容器323的盖的后端部可以被构造成在向上/向下方向上旋转。
277.当灰尘容器323的盖设置成覆盖灰尘容器323的上表面时,可以防止灰尘容器323通过灰尘容器323的盖与清洁器主体300分离。
278.清洁管嘴320被安装成相对于清洁器主体300中的管嘴容纳单元310在向上/向下方向上上升或下降。
279.清洁管嘴320包括设置成在向上方向上突出的多个上升/下降引导件321。
280.管嘴容纳单元310包括多个支撑部分311,该支撑部分被构造成支撑上升/下降引导件321的向上/向下移动。
281.支撑部分311分别在管嘴容纳单元310的前部和后部中设置成在向上/向下方向上被穿透,使得支撑部分311被上升/下降引导件321穿透并在向上/向下方向上可滑动地支撑上升/下降引导件321。
282.卡钩322设置在上升/下降引导件321的上端上,以在向外方向上突出。当上升/下降引导件321下降时,卡钩322设置成被卡在支撑部分311上。
283.在该构造中,卡钩322可以限制上升/下降引导件321的最低位置(初始位置)。
284.清洁管嘴320可以包括多个辅助上升/下降引导件131(参考图6和图7)。辅助上升/
下降引导件131(参考图6和图7)可以在向外方向上从清洁管嘴320突出。辅助上升/下降引导件131可以在向上/向下方向上竖直地延伸。辅助上升/下降引导件131可以布置在上升/下降引导件321下方。
285.辅助上升/下降引导件131可以被构造成竖直地升高或降低清洁管嘴320。
286.管嘴容纳单元310可以包括多个引导件容纳单元132。引导件容纳单元132(参考图6和图7)可以在其中包括引导凹槽133(参考图6和图7),以支撑辅助上升/下降引导件131在向上/向下方向上滑动。引导件容纳单元132可以布置在支撑部分311下方。
287.上升/下降引导件321和辅助上升/下降引导件131可以分别布置在清洁管嘴320的前部和后部中,以使容纳在清洁管嘴320中的刷子模块123布置在清洁管嘴320的前部和后部之间。
288.支撑部分311和引导件容纳单元132可以分别布置在管嘴容纳单元310的前部和后部中,以使刷子模块123布置在管嘴容纳单元310的前部和后部之间。
289.因此,根据本公开,多个上升/下降引导件128、228或321设置在清洁管嘴110、210或320的上部中,以在向上方向上突出。多个支撑部分130、230或311设置在管嘴容纳单元104、204或310的上部上以被穿透,管嘴容纳单元104、204或310被构造成覆盖清洁管嘴110、210或320的上部。上升/下降引导件128、228或321穿过支撑部分130、230或311以被支撑部分130、230或311支撑以上升或下降。因此,根据地板之间的高度差,清洁管嘴110、210或320可从在清洁器主体300的下部中向下开口的开口部分102上升或下降。因此,当清洁器主体300从硬地板1的表面移向可压缩地板表面时,清洁管嘴110、210或320卡在可压缩地板表面上的现象被最小化,并且因此可以改善行进性能。另外,当刷子模块123中的刷子在升高到可压缩地板表面上方的状态下旋转时,刷子模块123的旋转阻力减小,且因此刷子驱动部124或224上的负荷可减小。可以减少刷子驱动部124或224的功耗,并且因此可以延长可允许的清洁时间。
290.另外,当卡钩129、229或322设置成从上升/下降引导件128、228或321的上端部突出并且被卡在支撑部分130、230或311上时,清洁管嘴110、210或320可以在被悬挂到清洁器主体300中的管嘴容纳单元104、204或310的上部上的状态下被支撑。因此,卡钩129、229或322可限制清洁管嘴110、210或320的最低下降高度。
291.此外,辅助上升/下降引导件131可以设置成分别从清洁管嘴110、210或320的前表面和后表面突出成被布置在上升/下降引导件128、228或321下方。引导件容纳单元132可以设置成在向外方向上分别从管嘴容纳单元104、204或310的前表面和后表面突出成被布置在支撑部分130、230或311下方。辅助上升/下降引导件131可以沿着设置在引导件容纳单元132内部的引导凹槽133在向上/向下方向上被可滑动地支撑。因此,辅助上升/下降引导件131可以在容纳在引导件容纳单元132中的状态下向上或向下滑动,以稳定地支撑清洁管嘴110、210或320的竖直上升/下降。另外,辅助上升/下降引导件131和引导件容纳单元132可以防止在清洁管嘴110、210或320的竖直上升/下降期间的扭曲。
292.此外,引导件容纳单元132的上端部设置成具有封闭结构,引导凹槽133的上端被封闭在该封闭结构中。因此,当辅助上升/下降引导件131的上端部由于地板的高度而接收到压力并升高时,由于引导件容纳单元132的封闭结构,辅助上升/下降引导件131的最大上升高度可以被限制。
293.上升/下降引导件128、228或321和辅助上升/下降引导件131(均被构造成引导清洁管嘴110、210或320的上升/下降操作)可以被布置在刷子容纳单元112的上部上,以最小化异物的引入,该刷子容纳单元112被布置在清洁器主体300的上部内部中。另外,支撑部分130、230或311以及引导件容纳单元132被构造成支撑上升/下降引导件128、228或321以及辅助上升/下降引导件131以分别向上或向下移动并且具有简单的结构,这将极大地有助于机器人清洁器的小型化和成本降低。
294.此外,抽吸流动路径部236被构造成抽吸由刷子模块123扫除的异物等,并且延伸成从清洁管嘴110、210或320的后部突出以连接到管嘴容纳单元104、204或310。抽吸流动路径部236包括弹性材料,并且可以弹性地支撑被构造成根据地板的高度上升/下降的清洁管嘴110、210或320。
295.另外,刷子驱动部124或224安装在清洁管嘴110、210或320的一侧成的端部中,以驱动容纳在清洁管嘴110、210或320中的刷子模块123。抽吸流动路径部236还可以包括加强部分238,该加强部分用于沿着抽吸流动路径部236的定位成靠近刷子驱动部124或224或构成突出部分239的周边增加厚度。因此,可以校正刷子驱动部124或224上的不对称负荷。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。