1.本实用新型涉及一种锻压冲床机械手。
背景技术:
2.我国锻造行业发展历史悠久,最初是手工锻造送件。改革开放以来,人们逐渐认识到只有自动化才能提高我国锻压工业的质量。
3.机器手的使用大大提高了我国锻造行业的自动化程度,提高了锻件的质量。但是,使用常规的单夹具需要两个机器手完成工件的上料和下料工序,两个机器受占用的面积大,空间利用率低,机器人成本太高,上述工作传递机器手的传动结构复杂,传动效率低,另一方面,虽然与手工锻造相比时间缩短了,但仍存在节省时间比较少、生产效率不够高的现象。
技术实现要素:
4.为了克服现在锻压冲床机械手结构复杂的不足,本实用新型提供一种锻压冲床机械手。
5.本实用新型解决其技术问题的技术方案是:一种锻压冲床机械手,包括一个上料装置和上下料运输装置;所述上料装置包括一个加热管道,所述加热管道的末端是一个横向料道,所述横向料道末端是平行料道,所述横向料道一端设有一个横向推料气缸,所述横向推料气缸的头部设有一个横向料道推料头,所述横向料道推料头把加热管道中出来的预热工件推入平行料道;所述平行料道的一侧是一个平行推料气缸,所述平行推料气缸的头部是一个平行料道推头,所述平行料道推头把预热工件推到平行料道的末端;
6.所述上下料运输装置包括一个xyz运输机械手,所述xyz运输机械手具有一个横向的夹持臂,所述夹持臂的末端设有一个夹持爪,所述夹持臂上方还设有一个料兜臂,所述料兜臂前方设有一个活动料框,所述活动料框下方是一个固定料兜底,所述活动料框受一个料框驱动气缸驱动可以前后行,所述活动料框位于后工作位时,所述活动料框位于固定料兜底上,所述活动料框位于前工作位时,所述活动料框下方无支承;
7.所述夹持爪位于平行料道的末端。
8.对运输机械手结构进行优化,所述xyz运输机械手包括一个x向导轨,所述x向导轨上活设有一个x向立座,x向立座上设有一个竖立的y向导轨,所述y向导轨上活设有一个y向导轨活动台,所述y向导轨活动台上横向活设有一个带z向导轨的横向导轨台,所述横向导轨台上设有所述夹持臂,所述x向导轨、y向导轨、z向导轨一侧都设有带驱动齿轮的齿条运动机构。
9.一种兜底结构优选,所述固定料兜底是方形的,所述活动料框是四个边条组成的方框。
10.为便于下料,还包括一个倾斜的下料助道,所述活动料框可运动到下料助道的上方。
11.为了降低工件在下料助道中滑下时速度不过快,所述下料助道的末端设有一个缓冲翻板。
12.一种加热管道的优选,采用无接触加热的模式,所述加热管道是一个外周带有感应加热线圈的管道。
13.本实用新型在使用时锻压件通过加热管道被加热后进入横向料道,然后在横向推料气缸的推动下进入平行料道,锻压件在平行料道上移动一个距离后被xyz运输机械手的夹持爪抓住,xyz运输机械手把锻压件放入锻压台中进行锻压后,工件吸附在上模上,xyz 运输机械手的料兜进入上模下方,模具脱膜工件掉入料兜中,然后xyz运输机械手进入到下料助道的上方,活动料框前行下方露出空隙,工件落入下料助道中完成一个循环。
14.本实用新型的有益效果在于:1、采用全自动机械式的上下料,上料下料无需人工,一方面增加了工作效率,另一方面无需人工降低了锻压过程中的安全隐患,增加了安全性。2、料兜臂和夹持臂是固定在同一个xyz运输机械手上的,降低了整体结构的复杂度。
附图说明
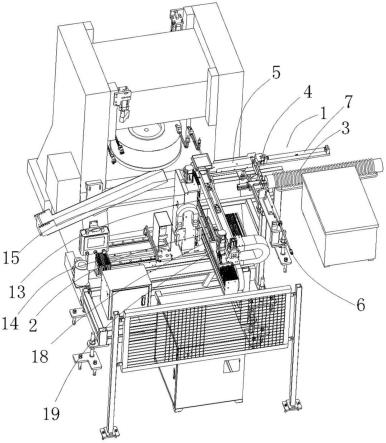
15.图1是一个实施例的示意图。
16.图2是一个实施例的另一个方向示意图。
17.图3是夹持爪和料兜的放大示意图。
具体实施方式
18.以下结合附图实施例对本实用新型作进一步详细描述。
19.实施例1
20.结合附图1至3,一种锻压冲床机械手,包括一个上料装置1和上下料运输装置2;所述上料装置1包括一个加热管道3,所述加热管道3的末端是一个横向料道4,所述横向料道4末端是平行料道5,所述横向料道4一端设有一个横向推料气缸6,所述横向推料气缸6的头部设有一个横向料道推料头,所述横向料道推料头把加热管道3中出来的预热工件推入平行料道5;所述平行料道5的一侧是一个平行推料气缸7,所述平行推料气缸7的头部是一个平行料道推头,所述平行料道推头把预热工件推到平行料道5的末端;
21.所述上下料运输装置2包括一个xyz运输机械手,所述xyz运输机械手具有一个横向的夹持臂8,所述夹持臂8的末端设有一个夹持爪9,所述夹持臂8上方还设有一个料兜臂 10,所述料兜臂10前方设有一个活动料框11,所述活动料框11下方是一个固定料兜底12,所述活动料框11受一个料框驱动气缸13驱动可以前后行,所述活动料框11位于后工作位时,所述活动料框11位于固定料兜底12上,所述活动料框11位于前工作位时,所述活动料框11下方无支承;
22.所述夹持爪9位于平行料道5的末端。
23.对运输机械手结构进行优化,所述xyz运输机械手包括一个x向导轨14,所述x向导轨14上活设有一个x向立座15,x向立座15上设有一个竖立的y向导轨16,所述y向导轨 16上活设有一个y向导轨活动台17,所述y向导轨活动台17上横向活设有一个带z向导轨 18的横向导轨台19,所述横向导轨台19上设有所述夹持臂8,所述x向导轨14、y向导轨 16、z向导轨18一侧都设有带驱动齿轮的齿条运动机构。
24.一种兜底结构优选,所述固定料兜底12是方形的,所述活动料框11是四个边条组成的方框。
25.为便于下料,还包括一个倾斜的下料助道,所述活动料框11可运动到下料助道的上方。
26.为了降低工件在下料助道中滑下时速度不过快,所述下料助道的末端设有一个缓冲翻板。
27.一种加热管道3的优选,采用无接触加热的模式,所述加热管道3是一个外周带有感应加热线圈的管道。
28.本实用新型在使用时锻压件通过加热管道3被加热后进入横向料道4,然后在横向推料气缸6的推动下进入平行料道5,锻压件在平行料道5上移动一个距离后被xyz运输机械手的夹持爪9抓住,xyz运输机械手把锻压件放入锻压台中进行锻压后,工件吸附在上模上,xyz运输机械手的料兜进入上模下方,模具脱膜工件掉入料兜中,然后xyz运输机械手进入到下料助道的上方,活动料框11前行下方露出空隙,工件落入下料助道中完成一个循环。
29.本实用新型的有益效果在于:1、采用全自动机械式的上下料,上料下料无需人工,一方面增加了工作效率,另一方面无需人工降低了锻压过程中的安全隐患,增加了安全性。2、料兜臂和夹持臂是固定在同一个xyz运输机械手上的,降低了整体结构的复杂度。
技术特征:
1.一种锻压冲床机械手,包括一个上料装置和上下料运输装置;其特征在于:所述上料装置包括一个加热管道,所述加热管道的末端是一个横向料道,所述横向料道末端是平行料道,所述横向料道一端设有一个横向推料气缸,所述横向推料气缸的头部设有一个横向料道推料头,所述横向料道推料头把加热管道中出来的预热工件推入平行料道;所述平行料道的一侧是一个平行推料气缸,所述平行推料气缸的头部是一个平行料道推头,所述平行料道推头把预热工件推到平行料道的末端;所述上下料运输装置包括一个xyz运输机械手,所述xyz运输机械手具有一个横向的夹持臂,所述夹持臂的末端设有一个夹持爪,所述夹持臂上方还设有一个料兜臂,所述料兜臂前方设有一个活动料框,所述活动料框下方是一个固定料兜底,所述活动料框受一个料框驱动气缸驱动可以前后行,所述活动料框位于后工作位时,所述活动料框位于固定料兜底上,所述活动料框位于前工作位时,所述活动料框下方无支承;所述夹持爪位于平行料道的末端。2.根据权利要求1所述的锻压冲床机械手,其特征在于:所述xyz运输机械手包括一个x向导轨,所述x向导轨上活设有一个x向立座,x向立座上设有一个竖立的y向导轨,所述y向导轨上活设有一个y向导轨活动台,所述y向导轨活动台上横向活设有一个带z向导轨的横向导轨台,所述横向导轨台上设有所述夹持臂,所述x向导轨、y向导轨、z向导轨一侧都设有带驱动齿轮的齿条运动机构。3.根据权利要求1所述的锻压冲床机械手,其特征在于:所述固定料兜底是方形的,所述活动料框是四个边条组成的方框。4.根据权利要求1所述的锻压冲床机械手,其特征在于:还包括一个倾斜的下料助道,所述活动料框可运动到下料助道的上方。5.根据权利要求4所述的锻压冲床机械手,其特征在于:所述下料助道的末端设有一个缓冲翻板。6.根据权利要求1所述的锻压冲床机械手,其特征在于:所述加热管道是一个外周带有感应加热线圈的管道。
技术总结
本实用新型涉及一种锻压冲床机械手,包括一个上料装置和上下料运输装置;所述上料装置包括一个加热管道,所述加热管道的末端是一个横向料道,所述横向料道末端是平行料道,所述横向料道一端设有一个横向推料气缸,所述横向推料气缸的头部设有一个横向料道推料头,所述横向料道推料头把加热管道中出来的预热工件推入平行料道;所述平行料道的一侧是一个平行推料气缸,所述平行推料气缸的头部是一个平行料道推头,所述平行料道推头把预热工件推到平行料道的末端;本实用新型的有益效果在于:采用全自动机械式的上下料,上料下料无需人工,一方面增加了工作效率,另一方面无需人工降低了锻压过程中的安全隐患,增加了安全性。增加了安全性。增加了安全性。
技术研发人员:徐淑君 张须 梁雪原
受保护的技术使用者:宁波今日自动化科技有限公司
技术研发日:2022.08.25
技术公布日:2022/12/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
