技术特征:
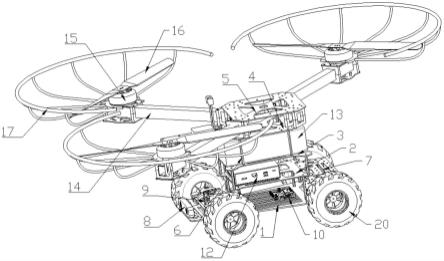
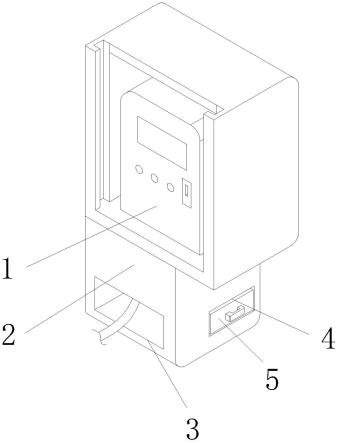
1.一种陆空两栖机器人,其特征在于:包括:机器人主体、行走机构和飞行机构;机器人主体包括从下至上依次通过螺柱连接的底盘、第一载板、第二载板和第三载板,且底盘、第一载板、第二载板和第三载板上均设有若干通孔形成镂空结构;行走机构设置在底盘上,行走机构包括行走轮、转向组件、行走电机和行走控制器;行走轮设置在底盘的下方,行走轮包括前轮和后轮,前轮通过转向组件控制转向,后轮与行走电机连接,行走控制器用于控制转向组件和行走电机的启动;底盘上还设有陆地摄像头;飞行机构设置在第三载板上,飞行机构包括若干个均匀分布在第三载板外周的第一桨叶,第一桨叶通过第一飞行电机驱动;第三载板上还设有飞行摄像头;第一载板上设有摄像处理系统,陆地摄像头和飞行摄像头均与摄像处理系统电连接;第二载板上设有用于提供电源的电池。2.根据权利要求1所述的陆空两栖机器人,其特征在于:转向组件包括连接轴、三爪连接件、转轴、转向支撑上板、舵机、舵机传动杆和转向连接杆;前轮设置在连接轴上,连接轴的一端固定连接有三爪连接件,底盘上靠近前轮处通过螺柱安装有转向支撑上板,三爪连接件的其中两个爪通转轴转动连接在底盘与转向支撑上板之间;舵机设置在底盘上,舵机上设有舵机传动杆,三爪连接件的另一个爪通过转向连接杆与舵机传动杆连接。3.根据权利要求2所述的陆空两栖机器人,其特征在于:前轮和后轮均为2个,2个三爪连接件的另一个爪通过转向横杆连接,且三爪连接件的另一个爪与转向横杆为转动连接;转向连接杆与转向横杆的一端连接。4.根据权利要求2所述的陆空两栖机器人,其特征在于:转向连接杆的两端与转向横杆和舵机传动杆均为球头连接。5.根据权利要求1所述的陆空两栖机器人,其特征在于:第三载板上设有与第一桨叶数目相等的支撑杆,支撑杆呈辐射状分布,支撑杆的一端固定在第三载板上,第一桨叶设置在另一端上。6.根据权利要求5所述的陆空两栖机器人,其特征在于:支撑杆上还设有罩在第一桨叶外周的保护架。7.根据权利要求5所述的陆空两栖机器人,其特征在于:支撑杆上还设有第二桨叶,第二桨叶通过第二飞行电机驱动,第一桨叶和第二桨叶上下设置在支撑杆上。8.根据权利要求5所述的陆空两栖机器人,其特征在于:第三载板上方还设有顶板,支撑杆固定在第三载板和顶板之间。9.根据权利要求1所述的陆空两栖机器人,其特征在于:行走电机的上方设有起保护作用的电机上板。10.根据权利要求1所述的陆空两栖机器人,其特征在于:第三载板上设有向外延伸的云台支撑板,飞行摄像头设置在云台支撑板上。
技术总结
本实用新型提供了一种陆空两栖机器人,包括:机器人主体、行走机构和飞行机构;机器人主体包括从下至上依次通过螺柱连接的底盘、第一载板、第二载板和第三载板,且底盘、第一载板、第二载板和第三载板上均设有若干通孔形成镂空结构;行走机构设置在底盘上,行走机构包括行走轮、转向组件、行走电机和行走控制器;底盘上还设有陆地摄像头;飞行机构设置在第三载板上,飞行机构包括若干个均匀分布在第三载板外周的第一桨叶;第三载板上还设有飞行摄像头;第一载板上设有摄像处理系统,陆地摄像头和飞行摄像头均与摄像处理系统电连接。本实用新型所述的陆空两栖机器人的结构简单,便于组装和拆卸,且整体结构轻便,为使用大容量电池提供技术支持。技术支持。技术支持。
技术研发人员:张素杰 王鸿鹏 杨超 焦万铭 柯瑜 颜妍 顾岩 杨玮怡 刘东旭
受保护的技术使用者:北京科技大学天津学院
技术研发日:2022.07.25
技术公布日:2022/12/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。