1.本发明涉及汽车技术领域,尤其涉及一种牵引车线控制动机构。
背景技术:
2.现有的人工踩踏制动踏板时,助力阀内的两位四通切换位置,使得助力油缸的左腔与转向泵压力油路连通,推动助力活塞杆及与之相连接的制动阀活塞,挤压制动液并在前后桥制动器上建立制动压力。同时,转向泵通过助力阀的稳压器油路供给液压转向器压力油,由于助力油缸所需要的液压油容积很小,因此在制动时,并不会影响转向器油路的液压油供给,不存在制动与转向的优先级问题。
技术实现要素:
3.本发明的目的是提供一种牵引车线控制动机构,在保留现有行车制动系统的前提下,并设计一套电动机械机构与液压助力阀的活塞顶杆并联,用以推动制动阀活塞。
4.本发明的技术方案是这样实现的:
5.一种牵引车线控制动机构,包括电动推杆、电动推杆控制器、电动推杆杠杆机构、制动踏板、制动踏板限位开关及角位移编码器。
6.所述电动推杆控制器通过can总线接收集成式自动驾驶智能控制器发出的制动指令控制电动推杆的伸长,并经滚轮平面副传递给电动推杆杠杆机构,增加后再由另一组滚轮平面副传递给助力阀的输入轴,模拟脚踩踏板的动作推动助力阀及制动阀形成前后桥的制动压力实现制动,所述电动推杆、电动推杆控制器及电动推杆杠杆机构形成电动推杆机构。
7.所述制动踏板、制动踏板限位开关及角位移编码器形成制动踏板机构。
8.所述电动推杆机构的输出端与制动踏板机构的旋转挡板端同时接触液压助力阀的输入滚轮,形成滚轮平面副。
9.所述电动推杆机构和制动踏板机构都与助力阀的输入轴滚轮形成非固定连式的滚轮平面副,所述电动推杆机构和制动踏板机构都能够自由地推动助力阀输入轴,且相互不产生影响。
10.进一步的,所述电动推杆上安装有电动推杆直线位移编码器,用于读取电动推杆的位移,并通过杠杆机构的机械约束几何关系式,得到电动推杆位移所对应的助力阀输入轴位移量。
11.进一步的,在人工驾驶行车制动时,所述电动推杆会保持在完全收缩的初始位,不对踏板经踩踏后的弹簧复位产生影响。
12.进一步的,在自动驾驶行车制动时,所述电动推杆的伸长并推动助力阀输入轴,与此同时助力阀输入轴的滚轮与制动踏板的输出挡板脱离,所述制动踏板在复位弹簧作用下保持在未被踩踏的初始状态。
13.进一步的,在前后桥行车制动液压回路上各增设一个压力传感器,以实时检测前
后桥的行车制动压力。
14.本发明的有益效果是:
15.(1)自动驾驶车辆未实施自动制动的状态,人工介入实施强行制动;由于电动推杆保持在完全收缩的初始位,制动踏板也保持在未被踩踏的初始状态,即踏板限位开关保持在常闭状态。此时,安全驾驶员人工踩踏制动踏板就会断开踏板限位开关,且此开关量变化由vcu的iuput检测到回报给上层自动驾驶智能控制器,车辆行车制动由人工接管。
16.(2)在自动驾驶车辆已进入自动制动的状态,人工介入实施更大制动力的强行制动,电动推杆已经伸长并推动助力阀的输入轴产生制动压力,此时人工介入踩踏制动踏板,虽然踏板限位开关由常闭状态变成断开,上层自动驾驶智能控制器应继续执行自动行车制动程序并保持电动推杆伸长位置,直至踏板的转动输出端接触到助力阀输入轴的滚轮为止,上层自动驾驶智能控制器方可下达跳脱自动行车制动指令,使电动推杆迅速收缩至完全收缩初始位,改由人工接管。这样设计的目的是为了避免电动推杆过早收缩而导致助力阀输入轴突然回弹、制动力减小、车辆减速度减小,而人工顺势踩踏踏板又会猛然增加制动力和减速度,从而产生车辆制动顿挫的乘坐不适感。
附图说明
17.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
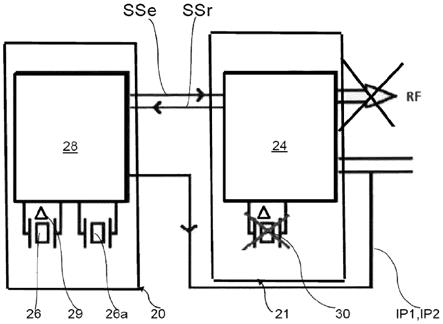
18.图1为一种牵引车线控制动机构的示意图。
具体实施方式
19.下面将结合本发明实施例中,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
20.根据本发明的实施例,提供了一种牵引车线控制动机构。
21.参照图1,根据本发明实施例的牵引车线控制动机构,包括包括电动推杆、电动推杆控制器、电动推杆杠杆机构、制动踏板、制动踏板限位开关及角位移编码器。
22.所述电动推杆控制器通过can总线接收集成式自动驾驶智能控制器发出的制动指令控制电动推杆的伸长,并经滚轮平面副传递给电动推杆杠杆机构,增加后再由另一组滚轮平面副传递给助力阀的输入轴,模拟脚踩踏板的动作推动助力阀及制动阀形成前后桥的制动压力实现制动,所述电动推杆、电动推杆控制器及电动推杆杠杆机构形成电动推杆机构。
23.所述制动踏板、制动踏板限位开关及角位移编码器形成制动踏板机构。
24.所述电动推杆机构的输出端与制动踏板机构的旋转挡板端同时接触液压助力阀的输入滚轮,形成滚轮平面副。
25.所述电动推杆机构和制动踏板机构都与助力阀的输入轴滚轮形成非固定连式的滚轮平面副,所述电动推杆机构和制动踏板机构都能够自由地推动助力阀输入轴,且相互不产生影响。
26.进一步的,所述电动推杆上安装有电动推杆直线位移编码器,用于读取电动推杆的位移,并通过杠杆机构的机械约束几何关系式,得到电动推杆位移所对应的助力阀输入轴位移量。
27.进一步的,在人工驾驶行车制动时,所述电动推杆会保持在完全收缩的初始位,不对踏板经踩踏后的弹簧复位产生影响。
28.进一步的,在自动驾驶行车制动时,所述电动推杆的伸长并推动助力阀输入轴,与此同时助力阀输入轴的滚轮与制动踏板的输出挡板脱离,所述制动踏板在复位弹簧作用下保持在未被踩踏的初始状态。
29.进一步的,在前后桥行车制动液压回路上各增设一个压力传感器,以实时检测前后桥的行车制动压力。通过上述技术方案:检测行车制动油路是否有渗漏等故障,通过压力反馈,判断是否在应能建压制动的情况下未能达到预期压力;另外,通过行车制动压力反馈,建立车辆行驶速度、载重、行车制动压力、制动减速度之间的数学模型,为车辆状态监控及预防性维护提供数据基础。
30.在自动驾驶时,人工行车制动的接入并接管分以下两种情况讨论;
31.(1)自动驾驶车辆未实施自动制动的状态,人工介入实施强行制动。
32.(2)自动驾驶车辆已经进入自动制动的状态,人工介入实施更大制动力的强行制动。
33.对于情况(1),由于电动推杆保持在完全收缩的初始位,制动踏板也保持在未被踩踏的初始状态,即踏板限位开关保持在常闭状态。此时,安全驾驶员人工踩踏制动踏板就会断开踏板限位开关,且此开关量变化由vcu的iuput检测到回报给上层自动驾驶智能控制器,车辆行车制动由人工接管。
34.对于情况(2),电动推杆已经伸长并推动助力阀的输入轴产生制动压力,此时人工介入踩踏制动踏板,虽然踏板限位开关由常闭状态变成断开,上层自动驾驶智能控制器应继续执行自动行车制动程序并保持电动推杆伸长位置,直至踏板的转动输出端接触到助力阀输入轴的滚轮为止,上层自动驾驶智能控制器方可下达跳脱自动行车制动指令,使电动推杆迅速收缩至完全收缩初始位,改由人工接管。这样设计的目的是为了避免电动推杆过早收缩而导致助力阀输入轴突然回弹、制动力减小、车辆减速度减小,而人工顺势踩踏踏板又会猛然增加制动力和减速度,从而产生车辆制动顿挫的乘坐不适感。
35.其中,由于电动推杆伸长位置与助力阀输入轴滚轮位置有确定的几何函数关系:助力阀输入轴滚轮位置=f(电动推杆伸长位置);同时制动踏板转角与助力阀输入轴滚轮位置也有确定的几何函数关系:助力阀输入轴滚轮位置=f(制动踏板转角),通过制动踏板转角=f(电动推杆伸长位置)的函数关系式,计算出在任意时刻电动推杆伸长位置所对应的制动踏板转角,也是此情况下制动踏板旋转输出端接触到助力阀输入轴滚轮所需转过角位移量。通过电动推杆上的绝对式直线位置编码器和制动踏板上的绝对式角位移编码器的反馈,vcu就能够判断踏板的转动输出端是否已经接触助力阀输入轴滚轮,从而上报给行驶智能控制器,跳脱自动行车制动,该由人工接管制动。
36.在情况(1)下做人工接管判断,只需要踏板限位开关量的反馈;而情况(2)下做人工接管判断,除踏板限位开关量外,还需要电动推杆的绝对式直线位移编码器以及制动踏板绝对式角位移编码器的反馈。
37.需要说明的是:出于车辆制动安全考量,在做电动推杆的功率、输出力及伸缩速度线型时:
38.(1)电动推杆通过机构制动的反应速度应至少等于或优于人类驾驶员的紧急制动反应速度,人在清醒时的平均制动反应速度为0.3秒。
39.(2)在转向泵失效的情况下,助力阀不能提供制动助力,此时驾驶员可以通过使劲踩制动踏板产生必须的制动压力使车辆停止;同样情况下,电动推杆在没有液压助力辅助的条件下通过杠杆机构增力后也应产生大于或等于人踩踏板所能达到的制动压力。
40.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。