1.本发明涉及石油天然气钻井工程领域,尤其涉及一种泥浆驱动旋 转导向钻井控制系统。
背景技术:
2.2021年我国石油对外依存度上升至72%,天然气攀升至46%,大 大超过国际公认的警戒线,目前我国常规油气资源开发已达极限,开 发页岩气等非常规油气是缓解我国能源需求的必然选择。长水平井是 促进页岩气经济长效开发的重要手段,水平井眼的形成需要井眼轨迹 控制,当前主要包括弯螺杆滑动导向和旋转导向两种井眼轨迹控制技 术:
3.弯螺杆滑动导向技术成本低,由此我国水平井导向依然以弯螺杆 滑动导向为主,例如在2020年,青海页岩气弯螺杆滑动导向占比超 过83%。在弯螺杆滑动导向过程中,钻柱不旋转,钻柱摩阻大极易“托 压”,导致钻压不能有效传递,机械钻速通常仅为旋转钻井的1/10~ 1/5;“托压”导致工具面不易调整和控制,钻井时效降低超过30%; 且极易形成岩屑床,粘附卡钻风险高。
4.旋转导向技术严重依赖进口,费用高昂:日费15~20万元,按45 天平均单井导向周期计算,仅旋转导向技术费用达675~900万元, 达到整个钻井费用的10-20%。旋转导向工具外径尺寸较大,卡埋和经 济风险极高:目前生产井井眼直径多数为215.9mm,旋转导向最大直 径达210mm,间隙不到6mm,极易发生岩屑卡死埋钻。因此在2020年 第32届全国天然气学术年会上,旋转导向技术依然被列为典型的“卡 脖子”技术。综上所述,旋转导向技术是解决长水平段钻井“托压”、 提高钻井效率、缩短建井周期的最有效手段。
5.旋转导向系统国外主要有us9556679b2、us9784036b2、us9528320、 us9714564、us6109372b2、us9828804b2等指向式专利,us8672056b2、 us9206644、us8672056b2、us7389830b2、us9476263b2等推靠式专利, 这些旋转导向系统均采用电机 泵 电磁阀 推靠块(液压油驱动)和 电机 转阀 推靠块(泥浆驱动)的驱动和控制模式,此类控制模式主 要有以下缺点:
6.(1)电能需求量较大,需要配备发电机,电机抗振性能和转速 控制精度要求高、难度大,成本居高不下;
7.(2)此类旋转导向涉及发电机、电机、泵、转阀等多个动密封 结构,结构极其复杂,可靠性较差;
8.(3)此类控制系统的系统压力不可控,导向钻井的导向力无法 实施精细化调控,同时这些超高温超高压电机、测控电路、高温高压 动密封、压力补偿短节等均被国外公司垄断,形成了严重的技术壁垒, 致使我国旋转导向技术依然是我国未突破瓶颈技术。
9.国内申请了cn201510134442.x、cn201810671572.0、 cn201811408149.8等相关旋转导向系统专利,这些专利几乎均采用 电机 泵 电磁阀 推靠块(液压油驱动)和电机 转阀 推靠块(泥浆 驱动)的驱动和控制模式,与国外专利相似,同样存在导向力不可控、 系统可靠性差、成本高等技术难题。
10.基于此,拟发明一种泥浆驱动导向钻井控制系统,有效解决现有 旋转导向钻井系统导向力不可控、系统可靠性差、成本高等技术难题。
技术实现要素:
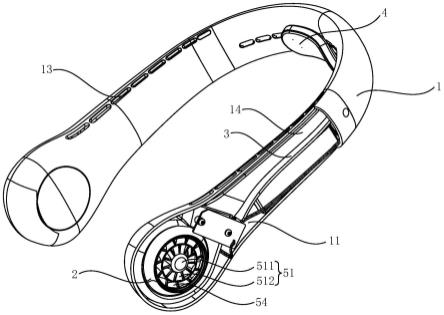
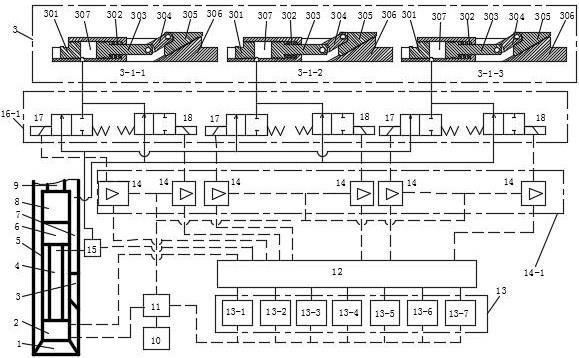
11.为了克服现有技术的不足,发明了一种泥浆驱动旋转导向钻井控 制系统。所述:由钻头(1)、电磁节流阀(2)、径向推力机构(3)、 旋转导向工具(4)、旋转导向工具内部泥浆通道(5)、泥浆脉冲发 射器(6)、环空(7)、上接头(8)、钻杆(9)、电池/发电机(10)、 电源管理模块(11)、cpu(11)、测量模块(13)、放大控制器组a (14-1)、电磁减压阀(15)、控制阀组a(16-1)组成,所述:电 磁节流阀(2)安装在钻头(1)和旋转导向工具(4)之间,可控制旋 转导向工具内部泥浆通道(5)内高压泥浆的压力,进而控制控制阀 组a(16-1)的泥浆压力;所述:旋转导向工具内部泥浆通道(5)与 控制阀组a(16-1)之间串联电磁减压阀(15),用于控制控制阀组 a(16-1)高压泥浆压力;所述:1~4个径向推力机构(3)左液压腔 (307)分别并联1~4个二位二通电磁插装阀a(17),并与环空(7) 连接;所述:1~4个径向推力机构(3)右液压腔(308)分别并联1~4 个二位二通电磁插装阀b(18),并与电磁减压阀(15)连接;所述: 二位二通电磁插装阀a(17)和二位二通电磁插装阀b(18)所组成 的控制阀组a(16-1)由放大控制器组a(14-1)进行控制;所述: 测量模块(13)由陀螺仪(13-1)、磁通量测量仪(13-2)、重力加 速度计(13-3)、泥浆脉冲控制器(13-4)、存储器(13-5)、管内 压力传感器(13-6)、管外压力传感器(13-7)组成。
12.所述:二位二通电磁插装阀a(17)为断电常闭二位二通电磁插 装阀,二通电磁插装阀b(18)为断电常开二位二通电磁插装阀,确 保断电状态或测控电路故障情况下,左液压腔(307)与环空(7)中 的低压泥浆保持连接状态,并与旋转导向工具内部泥浆通道(5)中 的高压泥浆保持断开状态,确保在弹簧(302)的弹力作用下将活塞 (303)左移,进而促使推力块(305)收缩,减小井下卡钻风险;同 时,也可减小非导向钻井作业中对电能的消耗,以延长旋转导向钻井 系统井下服务时间。
13.所述:1个径向推力机构(3-1-1)由1~4个并联的二位二通电磁 插装阀a(17)和1~4个并联的二位二通电磁插装阀b(17)所组成 的控制阀组d(16-4)进行控制,以提高左液压腔(307)和右液压腔 (308)进出液速度,进而提高径向推力机构d(3-2-1)的伸缩频率, 提高旋转导向控制精度和转速,实现高精度高转速钻井,同时可减小 任意1个小二位二通电磁插装阀a(17)或二位二通电磁插装阀b(18) 故障、堵塞等失效风险;所述:控制阀组d(16-4)配备与插装阀相 同数量的放大控制器(14)1个二位二通电磁插装阀a(17)或二位 二通电磁插装阀b(18)对应1个放大控制器(14);或:1~4个并 联的二位二通电磁插装阀a(17)配备1个放大控制器(14),1~4个 并联的二位二通电磁插装阀b(18)配备1个放大控制器(14),减 小放大控制器(14)的数量,提高同步性。
14.所述:二位二通电磁插装阀a(17)、二位二通电磁插装阀b(18) 可由二位三通电磁插装阀(19)代替;所述:二位三通电磁插装阀(19) 的机能为:断电时t口与左液压腔(307)连接,确保在弹簧(302) 的弹力作用下将活塞(303)左移,进而促使推力块(305)收缩,减 小井下卡钻风险;同时,也可减小非导向钻井作业中对电能的消耗, 以延长旋转导向钻井系统井下服务时间。
15.所述:当采用右液压缸(308)代替弹簧(302)时,可实现活塞 (303)全液压左右运
动,1~4个径向推力机构(3-1-1)中的活塞(303) 左右运动由二位四通电磁插装阀(20)所组成的控制阀组c(16-3) 控制;所述:二位四通电磁插装阀(20)为断电时p口与右液压腔 (308)连接、t口与左液压腔(307)连接,此时活塞(303)右液压 腔(308)为高压、左液压腔(307)为低压,确保活塞(303)左移, 进而促使推力块(305)收缩,减小井下卡钻风险;同时,也可减小非 导向钻井作业中对电能的消耗,以延长旋转导向钻井系统井下服务时 间。
16.所述:1个径向推力机构a(3-1-1)由1~4个并联的二位三通电 磁插装阀(19)所组成的控制阀组e(16-5)进行控制,以提高左液 压腔(307)和右液压腔(308)进出液速度,进而提高径向推力机构 d(3-2-1)的伸缩频率,提高旋转导向控制精度和转速,实现高精度 高转速钻井,同时可减小任意1个小二位三通电磁插装阀(19)故障、 堵塞等失效风险;所述:1~4个并联的二位三通电磁插装阀(19)所 组成的控制阀组e(16-5)配备1~4个放大控制器(14)组成的放大 控制器组e(14-5),1个二位三通电磁插装阀(19)对应1个放大 控制器(14);或:1~4个并联的二位三通电磁插装阀(19)组成的 控制阀组e(16-5)配备1个放大控制器h(14-8),减小放大控制 器(14)的数量,提高同步性。
17.所述:1个径向推力机构d(3-2-1)由1~4个并联的二位四通电 磁插装阀(20)组成的控制阀组f(16-6)进行控制,以提高左液压 腔(307)和右液压腔(308)进出液速度,进而提高径向推力机构d (3-2-1)的伸缩频率,提高旋转导向控制精度和转速,实现高精度 高转速钻井,同时可减小任意1个小二位四通电磁插装阀(20)故障、 堵塞等失效风险;所述:1~4个并联的二位四通电磁插装阀(20)组 成的控制阀组f(16-6)配备1~4个放大控制器(14)组成的放大控 制器组f(14-6),1个二位四通电磁插装阀(20)对应1个放大控 制器(14);或:1~4个并联的二位四通电磁插装阀(20)组成的控 制阀组f(16-6)配备1个放大控制器i(14-9),减小放大控制器 (14)的数量,提高同步性。
18.本发明与现有技术相比,具有的优点有:
19.(1)与常规发电机、驱动电机、高压泵、旋转阀等相比,本发明 的控制系统核心部件仅有电磁阀和放大控制器,控制原理简单,可靠 性好。
20.(2)通过电磁阀来控制径向推力机构的伸缩,避免了使用电机、 泵、高温高压动密封、压力补偿短节等价格高昂的元器件,成本低。
21.(3)本发明在钻头与旋转导向控制工具之间安装了一个电磁节 流阀,通过控制电磁节流阀的节流压力,可有效控制径向推力机构的 导向力,实现径向推力机构导向力的精细化控制。
附图说明
22.图1为本发明泥浆驱动旋转导向钻井控制系统原理图。
23.图2为二位三通电磁阀泥浆驱动旋转导向钻井控制系统原理图。
24.图3为二位四通电磁阀泥浆驱动旋转导向钻井控制系统原理图。
25.图4为多个二位二通电磁阀并联泥浆驱动旋转导向钻井控制系 统原理图。
26.图5为多个二位三通电磁阀并联泥浆驱动旋转导向钻井控制系 统原理图。
27.图6为多个二位四通电磁阀并联泥浆驱动旋转导向钻井控制系 统原理图。
28.图7为多个二位二通电磁阀并联单个放大控制器泥浆驱动旋转 导向钻井控制系统原理图。
29.图8为多个二位三通电磁阀并联单个放大控制器泥浆驱动旋转 导向钻井控制系统原理图。
30.图9为多个二位四通电磁阀并联单个放大控制器泥浆驱动旋转 导向钻井控制系统原理图。
31.图中:1-钻头,2-电磁节流阀,3-径向推力机构,3-1-1-径向推 力机构a,3-1-2径向推力机构b,3-1-3-径向推力机构c,3-2-1-径 向推力机构d,3-2-2-径向推力机构e,3-2-3-径向推力机构f,301
‑ꢀ
堵头,302-弹簧,303-活塞,304-连杆,305-推力块,306-本体,307
‑ꢀ
左液压腔,308-右液压腔,4-旋转导向工具,5-旋转导向工具内部泥 浆通道,6-泥浆脉冲发射器,7-环空,8-上接头,9-钻杆,10-电池/ 发电机,11-电源管理模块,12-cpu,13-测量模块,13-1-陀螺仪, 13-2-磁通量测量仪,13-3-重力加速度计,13-4-泥浆脉冲控制器, 13-5-存储器,13-6-管内压力传感器,13-7-管外压力传感器,14-放 大控制器,14-1-放大控制器组a,14-2-放大控制器组b,14-3-放大 控制器组c,14-4-放大控制器组d,14-5-放大控制器组e,14-6-放 大控制器组f,14-7-放大控制器组g,14-8-放大控制器h,14-9-放 大控制器i,15-电磁减压阀,16-1-控制阀组a,16-2-控制阀组b, 16-3-控制阀组c,16-4-控制阀组d,16-5-控制阀组e,16-6-控制阀 组f,17-二位二通电磁插装阀a,18
‑‑
二位二通电磁插装阀b,19-二 位三通电磁插装阀,20-二位四通电磁插装阀。
具体实施方式
32.为了对本发明的技术特征、目的效果有更加清楚的理解,现结合 附图说明本发明的具体实施例。
33.由图1~图9所示,本实施例提供一种泥浆驱动旋转导向钻井控制 系统,由钻头(1)、电磁节流阀(2)、径向推力机构(3)、旋转导 向工具(4)、旋转导向工具内部泥浆通道(5)、泥浆脉冲发射器(6)、 环空(7)、上接头(8)、钻杆(9)、电池/发电机(10)、电源管 理模块(11)、cpu(11)、测量模块(13)、放大控制器组a(14
‑ꢀ
1)、电磁减压阀(15)、控制阀组a(16-1)组成,所述:电磁节流 阀(2)安装在钻头(1)和旋转导向工具(4)之间,可控制旋转导向 工具内部泥浆通道(5)内高压泥浆的压力,进而控制控制阀组a(16
‑ꢀ
1)的泥浆压力;所述:旋转导向工具内部泥浆通道(5)与控制阀组 a(16-1)之间串联电磁减压阀(15),用于控制控制阀组a(16-1) 高压泥浆压力;所述:1~4个径向推力机构(3)左液压腔(307)分 别并联1~4个二位二通电磁插装阀a(17),并与环空(7)连接;所 述:1~4个径向推力机构(3)右液压腔(308)分别并联1~4个二位 二通电磁插装阀b(18),并与电磁减压阀(15)连接;所述:二位 二通电磁插装阀a(17)和二位二通电磁插装阀b(18)所组成的控 制阀组a(16-1)由放大控制器组a(14-1)进行控制;所述:测量 模块(13)由陀螺仪(13-1)、磁通量测量仪(13-2)、重力加速度 计(13-3)、泥浆脉冲控制器(13-4)、存储器(13-5)、管内压力 传感器(13-6)、管外压力传感器(13-7)组成。
34.实施例1:按照如图1所示连接泥浆驱动导向钻井控制系统,重 力加速度计(13-3)和磁通量测量仪(13-2)实时测量井斜角和工具 面角,若测得的井斜角小于10
°
时,cpu(11)关闭重力加速度计(13
‑ꢀ
3),打开磁通量测量仪(13-2),若井斜角大于10
°
时,cpu(11) 关闭磁通量测量仪(13-2),打开重力加速度计(13-3),以提高工 具面角测量精度。当管内压力传感器(13-6)测量到目标工具面角时, cpu(11)将目标工具面角存储到存储器(13-5),同
时控制放大器组 a(14-1)通断电。具体地,当径向推力机构a(3-1-1),达到目标 工具面角a
±
b(控制角)的范围之内,二位二通电磁插装阀a(17) 和二位二通电磁插装阀b(18)同时通电,此时旋转导向工具内部泥 浆通道(5)中的高压泥浆通过二位二通电磁插装阀a(17)进入到径 向推力机构a(3-1-1)的左液压腔(307),同时二位二通电磁插装 阀b(17)关闭,阻碍高压流体流出,径向推力机构a(3-1-1)的305
‑ꢀ
推力块伸出,并支撑在井壁上,为旋转导向钻井系统提供导向力,实 现旋转导向钻井;当径向推力机构a(3-1-1)离开目标工具面角a
±ꢀ
b(控制角)范围时,二位二通电磁插装阀a(17)和二位二通电磁插 装阀b(18)同时断电,此时旋转导向工具内部泥浆通道(5)中的高 压泥浆通过二位二通电磁插装阀b(18)进入到径向推力机构a(3
‑ꢀ
1-1)的右液压腔(308),环空(7)中的低压泥浆与左液压腔(307) 连通,径向推力机构a(3-1-1)的推力块(305)收缩。
35.实施例2:如图2所示,连接泥浆驱动导向钻井控制系统,重力 加速度计(13-3)和磁通量测量仪(13-2)实时测量井斜角和工具面 角,若测得的井斜角小于10
°
时,cpu(11)关闭重力加速度计(13
‑ꢀ
3),打开磁通量测量仪(13-2),若井斜角大于10
°
时,cpu(11) 关闭磁通量测量仪(13-2),打开重力加速度计(13-3),以提高工 具面角测量精度。当管内压力传感器(13-6)测量到目标工具面角a 时,cpu(11)将目标工具面角存储到存储器(13-5),同时控制放大 器组b(14-2)通断电,具体地,当径向推力机构a(3-1-1),达到 目标工具面角a
±
b(控制角)的范围之内,二位三通电磁插装阀(19) 通电,此时旋转导向工具内部泥浆通道(5)中的高压泥浆通过二位 三通电磁插装阀(19)进入到径向推力机构a(3-1-1)的左液压腔 (307),径向推力机构a(3-1-1)的推力块(305)伸出,并支撑在 井壁上,为旋转导向钻井系统提供导向力,实现旋转导向钻井;当径 向推力机构a(3-1-1)离开目标工具面角a
±
b(控制角)范围时, 二位三通电磁插装阀(19)断电,此时旋转导向工具内部泥浆通道(5) 中的高压泥浆通过二位三通电磁插装阀(19)进入到径向推力机构a (3-1-1)的右液压腔(308),环空(7)中的低压泥浆与左液压腔 (307)连通,径向推力机构a(3-1-1)的推力块(305)收缩。
36.实施例3:如图3所示,连接泥浆驱动导向钻井控制系统,重力 加速度计(13-3)和磁通量测量仪(13-2)实时测量井斜角和工具面 角,若测得的井斜角小于10
°
时,cpu(11)关闭重力加速度计(13
‑ꢀ
3),打开磁通量测量仪(13-2),若井斜角大于10
°
时,cpu(11) 关闭磁通量测量仪(13-2),打开重力加速度计(13-3),以提高工 具面角测量精度。当管内压力传感器(13-6)测量到目标工具面角a 时,cpu(11)将目标工具面角存储到存储器(13-5),同时控制放大 器组c(14-3)通断电,具体地,当径向推力机构a(3-1-1),达到 目标工具面角a
±
b(控制角)的范围之内,二位四通电磁插装阀(20) 通电,此时旋转导向工具内部泥浆通道(5)中的高压泥浆通过二位 四通电磁插装阀(20)进入到径向推力机构a(3-1-1)的左液压腔 (307),环空(7)中的低压泥浆与右液压腔(308)连通,径向推力 机构a(3-1-1)的推力块(305)伸出,并支撑在井壁上,为旋转导 向钻井系统提供导向力,实现旋转导向钻井;当径向推力机构a(3
‑ꢀ
1-1)离开目标工具面角a
±
b(控制角)范围时,二位四通电磁插装 阀(20)断电,此时旋转导向工具内部泥浆通道(5)中的高压泥浆通 过二位四通电磁插装阀(20)进入到径向推力机构a(3-1-1)的右液 压腔(308),环空(7)中的低压泥浆与左液压腔(307)连通,径向 推力机构a(3-1-1)的推力块(305)收缩。
37.以上所述仅为本发明示意性的具体实施方式,并非用以限定本发 明的范围。任何
本领域的技术人员,在不脱离本发明的构思和原则的 前提下所做出的等同变化和修改,均应属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。