1.本技术涉及自动化控制技术领域,具体而言,涉及一种托盘车的称重装置及称量方法。
背景技术:
2.托盘车为一种独立运输钢卷的新能源智能化托盘车,随着托盘车长期运行,会有车轮磨损、车体改造等情况造成托盘车皮重重量变化,所以托盘车皮重需要周期性校验,校验过程需要人为的将托盘车开到钢卷秤上,并将测量数值手动录入,校验容易耗费大量人力和时间,并且该过程会出现人为输入错误的情况。
技术实现要素:
3.本技术的实施例提供了一种托盘车的称重装置及称量方法,进而至少在一定程度上可以自动称量校验托盘车的重量。
4.本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
5.根据本技术实施例的一个方面,提供了一种托盘车的称重装置,所述装置包括:运输轨道,所述托盘车沿所述运输轨道运动;称量单元,用于称量所述托盘车的重量;位置检测单元,设置于所述运输轨道上或者所述称量单元上,用于识别所述托盘车或者检测所述托盘车的位置;中央处理单元,分别与所述称量单元和所述位置检测单元通信连接。
6.在本技术的一些实施例中,所述称量单元包括第一称量单元和第二称量单元,所述第一称量单元和所述第二称量单元按预定间隔沿所述运输轨道长度方向设置。
7.在本技术的一些实施例中,基于前述方案,所述位置检测单元包括第一位置检测单元、第二位置检测单元、以及第三位置检测单元,所述第一位置检测单元和所述第二位置检测单元分别设置于所述第一称量单元和所述第二称量单元,所述第三位置检测单元设置于所述运输轨道上。
8.根据本技术实施例的一个方面,提供了一种托盘车的称重方法,,所述方法通过如上所述的称重装置实现,所述方法包括:如果所述托盘车沿所述运输轨道运行至所述第三位置检测单元所在位置时,所述第三位置检测单元识别所述托盘车的车号,并将车号信息发送到所述中央处理单元;在触发到针对所述托盘车的称重信号时,所述中央处理单元控制所述托盘车运行至所述第一称量单元所在位置,通过所述第一称量单元获取所述托盘车对应的第一重量;在获取到所述第一重量后,所述中央处理单元控制所述托盘车运行至所述第二称量单元所在位置,通过所述第二称量单元获取所述托盘车对应的第二重量;如果所述第一重量和所述第二重量的重量偏差小于预定偏差,则所述中央处理单元将所述第一重量和所述第二重量储存于所述车号信息对应的重量信息。
9.在本技术的一些实施例中,所述中央处理单元控制所述托盘车运行至所述第一称量单元所在位置,包括:所述中央处理单元控制所述托盘车沿轨道运行,并通过所述第一位
置检测单元持续检测所述托盘车的位置;如果所述第一位置检测单元检测到所述托盘车处于所述第一位置检测单元所在位置,则所述中央处理单元控制所述托盘车停止运行,以控制所述托盘车运行至所述第一称量单元所在位置。
10.在本技术的一些实施例中,所述控制所述托盘车运行至所述第二称量单元所在位置,包括:所述中央处理单元控制所述托盘车沿轨道运行,并通过所述第二位置检测单元持续检测所述托盘车的位置;如果所述第二位置检测单元检测到所述托盘车处于所述第二位置检测单元所在位置,则所述中央处理单元控制所述托盘车停止运行,以控制所述托盘车运行至所述第二称量单元所在位置。
11.在本技术的一些实施例中,所述触发到针对所述托盘车的称重信号,包括:如果所述中央处理单元根据所述车号信息判断所述托盘车处于待称重状态,则触发到针对所述托盘车的称重信号。
12.在本技术的一些实施例中,所述触发到针对所述托盘车的称重信号,包括:如果所述中央处理单元处于称重校验模式,触发到针对所述托盘车的称重信号。
13.在本技术的一些实施例中,所述预定偏差根据所述托盘车的出厂重量确定,所述托盘车的出厂重量用于表征所述托盘车未经使用时的重量。
14.在本技术的一些实施例中,在所述中央处理单元将所述第一重量和所述第二重量储存于所述车号信息对应的重量信息之后,所述方法还包括:所述中央处理单元控制所述托盘车离开所述运输轨道,同时根据称重序列控制下一台托盘车进入所述运输轨道并沿所述运输轨道运行。
15.在本技术的一些实施例所提供的技术方案中,通过设置运输轨道、位置检测单元以及称量单元,并在中央处理单元的控制下全自动完成运输线所有托盘车皮重自动校验功能,无需人员记录以及干涉,可以大量减少人力和时间的消耗,同时可避免托盘车皮重录入错误。
16.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
17.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
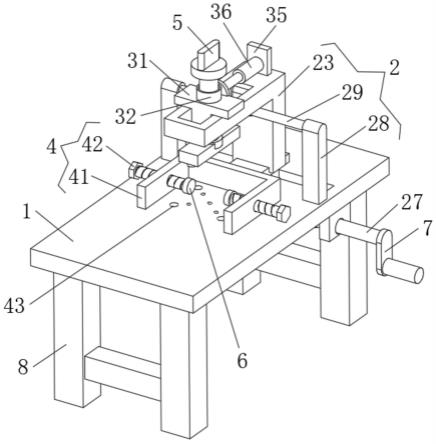
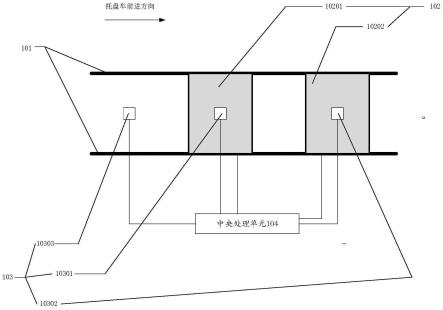
18.图1示出了根据本技术一个实施例的托盘车的称重装置的机构简图;
19.图2示出了根据本技术的一个实施例的托盘车的称重方法的流程简图;
20.图3示出了根据本技术的一个实施例的托盘车的称重方法的流程简图;
21.图4示出了根据本技术的一个实施例的托盘车的称重方法的流程简图;
22.附图具体标号如下所示:
23.运输轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101;
24.称量单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102;
25.第一称量单元
ꢀꢀꢀꢀꢀ
10201;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二称量单元
ꢀꢀꢀꢀꢀꢀ
10202;
26.位置检测单元
ꢀꢀꢀꢀꢀ
103;
27.第一位置检测单元 10301;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二位置检测单元
ꢀꢀ
10302;
28.第三位置检测单元 10303;
29.中央处理单元
ꢀꢀꢀꢀꢀ
104。
具体实施方式
30.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本技术将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。
31.此外,所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本技术的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本技术的技术方案而没有特定细节中的一个或更多,或者可以采用其它的方法、组元、装置、步骤等。在其它情况下,不详细示出或描述公知方法、装置、实现或者操作以避免模糊本技术的各方面。
32.附图中所示的流程图仅是示例性说明,不是必须包括所有的内容和操作/步骤,也不是必须按所描述的顺序执行。例如,有的操作/步骤还可以分解,而有的操作/步骤可以合并或部分合并,因此实际执行的顺序有可能根据实际情况改变。
33.请参阅图1。
34.图1示出了根据本技术一个实施例的托盘车的称重装置的机构简图,如图1所示,所述装置可以包括:运输轨道101,所述托盘车沿所述运输轨道101运动;称量单元102,用于称量所述托盘车的重量;位置检测单元103,设置于所述运输轨道101上或者所述称量单元102上,用于识别所述托盘车或者检测所述托盘车的位置;中央处理单元104,分别与所述称量单元102和所述位置检测单元103通信连接。
35.在本技术中,所述运输轨道101可以连接于所述托盘车用于运输钢卷的轨道,有助于所述托盘车在完成承托运输任务后进行重量称量校验。
36.请继续参阅图1。
37.在本技术中,所述称量单元102可以包括第一称量单元10201和第二称量单元10202,所述第一称量单元10201和所述第二称量单元10202按预定间隔沿所述运输轨道101长度方向设置。如果沿所述托盘车前进方向进行说明,所述第一称量单元10201可以设置于所述第二称量单元10202之前,所述托盘车先到达所述第一称量单元10201,再前往所述第二称量单元10202。
38.在本技术中,所述称量单元102可以为钢卷秤或者地台秤。
39.在本技术中,所述称量单元102可以分为钢卷秤以及测量仪表,所述测量仪表设置于所述钢卷秤和所述中央处理单元104之间,用于读取或显示钢卷秤的读数,并将重量信息发送至所述中央处理单元104。
40.请继续参阅图1。
41.在本技术中,所述位置检测单元103可以包括第一位置检测单元10301、第二位置检测单元10302、以及第三位置检测单元10303,所述第一位置检测单元10301和所述第二位置检测单元10302分别设置于所述第一称量单元10201和所述第二称量单元10202,所述第
三位置检测单元10303设置于所述运输轨道101上。如果沿所述托盘车前进方向进行说明,所述第三位置检测单元10303可以设置于所述第一位置检测单元10301之前。
42.在本技术中,所述位置检测单元可以根据预先设置于托盘车上的标识识别当前托盘车的车号。各个托盘车可以设置有信号发射器或者接收器,相对的在所述位置检测单元103上设置信号接收器或发射器。当信号发射器和信号接收器处于同一垂线上时,信号接收器接收到信号,说明托盘车已经到达位置检测单元103所在的位置。
43.在本技术中,可以在所述位置检测单元103上设置信号接收器或发射器,并在垂直方向上相对设置发射器和接收器,当所述托盘车经过或到达所述位置检测单元103所在位置时,信号会中断,说明托盘车已经到达位置检测单元103所在的位置。
44.接下来将结合附图,对本技术提供的托盘车的称重方法进行说明。
45.请参阅图1和图2。
46.图2示出了根据本技术的一个实施例的托盘车的称重方法的流程简图,所述方法通过如上所述的称重装置实现,所述方法可以包括步骤s201-s204:
47.步骤s201,如果所述托盘车沿所述运输轨道101运行至所述第三位置检测单元10303所在位置时,所述第三位置检测单元10303识别所述托盘车的车号,并将车号信息发送到所述中央处理单元104。
48.步骤s202,在触发到针对所述托盘车的称重信号时,所述中央处理单元104控制所述托盘车运行至所述第一称量单元10201所在位置,通过所述第一称量单元10201获取所述托盘车对应的第一重量。
49.步骤s203,在获取到所述第一重量后,所述中央处理单元104控制所述托盘车运行至所述第二称量单元10202所在位置,通过所述第二称量单元10202获取所述托盘车对应的第二重量。
50.步骤s204,如果所述第一重量和所述第二重量的重量偏差小于预定偏差,则所述中央处理单元104将所述第一重量和所述第二重量储存于所述车号信息对应的重量信息。
51.在本技术中,可以通过第三位置检测单元10303判断所述托盘车是否进入所述称重装置,并识别当前托盘车的车号,为后续记录重量数据做准备。
52.例如,所述托盘车沿所述运输轨道101运行时,所述第三位置检测单元10303判断所述托盘车已经处于自身所在位置时,则可以识别所述托盘车的车号,并可以将车号信息发送到所述中央处理单元104。
53.请参阅图1和图3。
54.图3示出了根据本技术的一个实施例的托盘车的称重方法的流程简图,如图3所示,在上述步骤s202中,所述中央处理单元104控制所述托盘车运行至所述第一称量单元10201所在位置的方法可以包括步骤s301-s302:
55.步骤s301,所述中央处理单元104控制所述托盘车沿轨道运行,并通过所述第一位置检测单元10301持续检测所述托盘车的位置。
56.步骤s302,如果所述第一位置检测单元10301检测到所述托盘车处于所述第一位置检测单元10301所在位置,则所述中央处理单元104控制所述托盘车停止运行,以控制所述托盘车运行至所述第一称量单元10201所在位置。
57.在本技术中,可以通过第一位置检测单元10301判断所述托盘车是否处于所述第
一称量单元10201的位置,从而确定所述第一称量单元10201所进行的称量操作是否准确,是否完整称量托盘车的整体重量。
58.例如,如果所述第一位置检测单元10301检测到所述托盘车处于所述第一位置检测单元10301所在位置,则所述中央处理单元104控制所述托盘车停止运行,此时可以判断所述托盘车已经运行至所述第一称量单元10201所在位置,所述第一称量单元10201所进行的称量操作可以准确且完整称量托盘车的整体重量。
59.请参阅图1和图4。
60.图4示出了根据本技术的一个实施例的托盘车的称重方法的流程简图,如图4所示,在上述步骤s203中,所述控制所述托盘车运行至所述第二称量单元10202所在位置的方法可以包括步骤s401-s402:
61.步骤s401,所述中央处理单元104控制所述托盘车沿轨道运行,并通过所述第二位置检测单元10302持续检测所述托盘车的位置。
62.步骤s402,如果所述第二位置检测单元10302检测到所述托盘车处于所述第二位置检测单元10302所在位置,则所述中央处理单元104控制所述托盘车停止运行,以控制所述托盘车运行至所述第二称量单元10202所在位置。
63.在本技术中,可以通过第二位置检测单元10302判断所述托盘车是否处于所述第二称量单元10202的位置,从而确定所述第二称量单元10202所进行的称量操作是否准确,是否完整称量托盘车的整体重量。
64.例如,如果所述第二位置检测单元10302检测到所述托盘车处于所述第二位置检测单元10302所在位置,则所述中央处理单元104控制所述托盘车停止运行,此时可以判断所述托盘车已经运行至所述第二称量单元10202所在位置,所述第二称量单元10202所进行的称量操作可以准确且完整称量托盘车的整体重量。
65.在本技术中,所述触发到针对所述托盘车的称重信号,包括:如果所述中央处理单元104根据所述车号信息判断所述托盘车处于待称重状态,则触发到针对所述托盘车的称重信号。
66.在本技术中,所述触发到针对所述托盘车的称重信号,包括:如果所述中央处理单元104处于称重校验模式,触发到针对所述托盘车的称重信号。
67.在本技术中,所述预定偏差根据所述托盘车的出厂重量确定,所述托盘车的出厂重量用于表征所述托盘车未经使用时的重量。
68.例如,所述预定偏差可以为10kg,当所述第一重量和所述第二重量的重量偏差小于10kg,则可以将所述第一重量和所述第二重量记录于车号信息对应的重量信息中。
69.在本技术中,在所述中央处理单元104将所述第一重量和所述第二重量储存于所述车号信息对应的重量信息之后,所述方法还包括:所述中央处理单元104控制所述托盘车离开所述运输轨道101,同时根据称重序列控制下一台托盘车进入所述运输轨道101并沿所述运输轨道101运行。
70.本领域技术人员在考虑说明书及实践这里公开的实施方式后,将容易想到本技术的其它实施方案。本技术旨在涵盖本技术的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本技术的一般性原理并包括本技术未公开的本技术领域中的公知常识或惯用技术手段。
71.应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本技术的范围仅由所附的权利要求来限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。