1.本发明涉及手动操作例如以用于对象检查或处置并且用于向对象施加力的设备。
背景技术:
2.当医学从业者测试反射或进行涉及受控的力施加的其他身体检查测试时,他们易于递送变化的力幅度、施加角度或可能影响测试结果的其他参数变化。这些变化导致难以比较的主观结论。
3.已经测试了涉及仪器化刺激工具或视频分析以控制不同刺激参数的解决方案。由于难以转移到临床现实和实施成本,这些具有有限的临床影响。
4.仍然需要一种更可靠且简单的方式来在检查或测试期间提供可重复的力。
5.cn107456248公开了一种在锤头(hammer head)中具有基于弹簧的力吸收装置的冲击锤设备。
6.cn108523933公开了一种在锤头中具有液压缸式力吸收装置的冲击锤设备。
7.cn108852420公开了一种具有用于控制冲击锤力的电磁体装置的冲击锤设备。
8.cn108852419公开了一种在锤头中具有用于产生期望范围内的冲击力的磁体和弹簧装置的冲击锤设备。
技术实现要素:
9.本发明由权利要求限定。
10.根据依据本发明的一个方面的示例,提供了一种用于在检查、处置或诊断期间向对象的身体施加力的医学设备,所述设备包括:
11.力施加表面,其具有用于接触所述对象的身体的接触区;
12.材料结构,其包括用于接收来自所述医学设备的用户的手动输入力的输入部、以及耦合到所述力施加表面以便递送输出力的输出部,其中,所述材料结构具有在所述输入部与所述输出部之间的力传递函数(force transfer function),所述力传递函数通过限制高于阈值的手动输入力到所述输出部的耦合来实施力限制功能。
13.所述材料结构包括限定可压缩单元的模块化布置的梁的布置,每个单元具有屈曲阈值。
14.所述设备实施力阈值行为,使得即使用户(例如,医学从业者)手动施加可变的输入力,也将已知的力施加到对象的身体。该设备使得医学从业者能够(例如在不同对象之间)以一致施加的力执行手动流程(诸如对象检查)。以这种方式,对不同检查(或处置或诊断)的结果的解读更一致。
15.所述材料结构例如在所述输入部与所述输出部之间具有力传递函数,所述力传递函数取决于所述手动输入力的角度。例如,如果以不正确的角度施加力,则会导致低的力。
16.所述材料结构可以在所述输入部与所述输出部之间具有力传递函数,所述力传递
函数取决于所述力施加到所述对象的身体的面积。
17.所述材料结构可以在所述输入部与所述输出部之间具有力传递函数,所述力传递函数取决于所述手动输入力的时间动力学。例如,可能期望以特定速率施加力。
18.因此,所述材料结构可以被设计为响应于施加的正确区域或方向和/或手动施加的力的时间特性而递送力。
19.所述材料结构包括梁的布置。各个梁的设计和梁之间的关系决定了材料的性质。梁例如形成一起形成结构主体的重复可压缩单元。
20.所述设备还可以包括用于测量所述接触区处的相互作用的一个或多个传感器。这可以用于向用户提供反馈。
21.所述一个或多个传感器例如包括以下中的一个或多个:
22.拉伸传感器;
23.力传感器;以及
24.声学传感器。
25.另一示例是根据应力改变颜色的应力传感器。
26.所述设备可以包括手柄和可拆卸工具头部,其中,材料结构在所述手柄内,并且所述工具头部限定所述力施加表面。所述材料结构可以以这种方式用作手柄的一部分,然后可以将该手柄附接到一组不同的工具。
27.在一组示例中,所述设备包括反射锤,所述反射锤包括手柄和锤头,其中,所述接触区包括所述锤头的端部。因此,该设备使得已知且可重复的力能够由反射锤施加。
28.在另一组示例中,所述设备包括医生手套,其中,所述接触区包括在所述手套的指状物的末端处的指垫。因此,该设备使得已知且可重复的力能够由用户的手指施加。
29.在另一组示例中,所述设备包括用于肺部声学检查的轻拍垫,其中,所述接触区包括所述轻拍垫的表面。
30.在另一组示例中,所述设备包括神经生理学测试工具,其中,所述接触区包括所述测试工具的端部。然后,所述材料结构控制施加在端部处的力。所述测试工具可以包括在一端具有钝端部并且在相对端具有锋利端部的轴,其中,所述接触区包括所述端部,并且相应的材料结构从所述端部中的每个端部向后设置。因此,一对端部均具有它们自己的相应材料结构。
31.在另一组示例中,所述设备包括具有抓握区域的工具,所述工具将在所述抓握区域处被所述用户抓握,其中,所述材料结构被提供在所述抓握区域与所述工具的其余部分之间。因此,施加到该工具的夹持力由材料结构调节。
32.本发明的这些和其他方面将参考下文描述的(一个或多个)实施例变得显而易见并将参考下文描述的(一个或多个)实施例得以阐述。
附图说明
33.为了更好地理解本发明并且为了更清楚地示出它可以如何被实施,现在将会仅以范例的方式参照附图,其中:
34.图1示出了根据本发明的反射锤形式的医学设备的第一示例;
35.图2示出了根据本发明的医生手套形式的医学设备的第二示例;
36.图3示出了根据本发明的神经生理测试工具形式的医学设备的第三示例;
37.图4示出了根据本发明的具有抓握部的通用工具形式的医学设备的第四示例;
38.图5示出了用于简单线性力限制设备的示例结构;
39.图6示出了用于材料结构的设计和制造系统;并且
40.图7示出了设计和制造方法。
具体实施方式
41.将参考附图来描述本发明。
42.应当理解,详细描述和具体范例在指示装置、系统和方法的示范性实施例的同时,仅旨在用于说明的目的,而不旨在限制本发明的范围。根据以下描述、所附权利要求和附图将更好地理解本发明的装置、系统和方法的这些和其他特征、方面和优点。应当理解,附图仅仅是示意性的,并未按比例绘制。还应当理解,在整个附图中使用相同的附图标记来表示相同或相似的部件。
43.本发明提供了一种用于借助于力施加表面向对象的身体施加力的医学设备。材料结构具有用于接收来自所述医学设备的用户的手动输入力的输入部、以及耦合到所述力施加表面以便递送输出力的输出部。所述材料结构实施包括力限制功能的力传递功能,使得有限的已知力被施加到对象的身体。
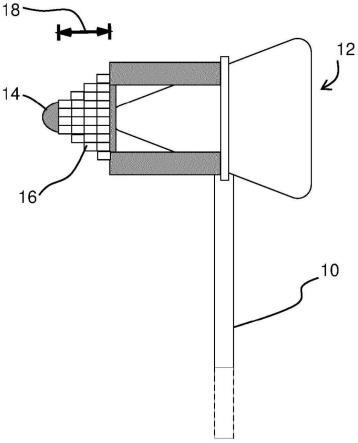
44.图1示出了根据本发明的用于在检查、处置或诊断期间向对象的身体施加力的医学设备的第一示例。该示例是具有手柄10和锤头12的反射锤。锤头12具有用于在锤头的端部14处接触对象的身体(例如膝盖)的接触区。接触区由施力表面形成,并且是旨在用于与人体或与另一物体接触的区域。
45.材料结构16被提供在端部14与锤头的后部之间。材料结构16具有用于接收来自锤的用户的手动输入力的输入部(图1中的右侧)以及耦合到力施加表面(即端部14)的输出部(图1中的左侧)。
46.材料结构16具有在输入部和输出部之间的力传递函数,其通过限制高于阈值的手动输入力到输出部的耦合来实施力限制功能。特别地,材料结构具有校正医学从业者的误差裕量的变形范围18。
47.变形是弹性的,使得设备可以被重复地重复使用。
48.本发明可以作为添加到现有的反射锤表面的模块来应用。任选地,当引入剪切应力(其在以不正确的角度进行锤接触时出现)时,材料结构16具有变形阈值。该阈值可以被设计为低得多,以便在使用不正确的技术时引起快速塌缩。这将引起明显的材料塌缩,而不会向对象递送显著的力。由此确保了向患者施加垂直力递送的正确技术。
49.力由材料结构处理的方式是材料结构的设计过程的一部分,如下所述。特别地,预期的输入力形成设计过程的初始约束的一部分,并且这些可以包括预期的力施加范围和预期的施加角度变化(gp通常在执行反射测试时应用预期的输入力)。这些初始条件可以通过实验室条件测试、或通过从执行反射测试的gp的自然视频中提取信息的方法来确定。
50.所述材料结构例如包括诸如梁的单元的模块化布置。例如,材料结构直到达到预定力阈值才变形,因此当每个单元达到屈曲阈值时,材料结构以多个步骤变形。即使当材料变形时,所施加的力也将保持大致恒定。使用每个单元的更小长度尺度,例如20层内部重复
单位而不是4层(如图1中示意性地示出的)将增加所施加的力在所选择的最大值处的平滑度。因此,可以基于被定义为初始设计条件的一部分的力变化来实现平滑的力施加。
51.限定接触区的端部可以由固定到材料结构(如图1所示)的单独的简单材料形成,或它可以是材料结构本身的表面。因此,接触面积或接触形状不需要受材料结构设计的约束。
52.材料结构的背面例如刚性地固定到反射锤头,使得力从手柄10(脉冲源)直接传递到材料结构16。材料结构可以设计成例如使用可调带被固定到一系列不同的锤设计。
53.图2示出了根据本发明的医生手套形式的医学设备的第二示例。示出了四个指状物20a至20d,每个指状物具有由手套的指状物的末端处的指垫22a至22d限定的接触区。
54.这使得医生能够感觉到何时已经超过预设(阈值)力。力阈值或力传递函数的其他特性在手套的不同指状物之间可以是不同的,从而允许医生测试力灵敏度阈值的范围。这在图2中示意性地示出。每个指垫例如具有刚性背衬以确保单元的正确运行。
55.材料结构可以被设计成使得当达到力阈值或达到最大变形时,变形过程改变接触用户皮肤的表面的拓扑结构,诸如形成“凸起”或产生对指垫表面的敲击。为了实现此,可以考虑施加到后表面的力的性质来设计材料的响应。这可以用于增强满足期望力阈值的感觉能力。
56.图3示出了根据本发明的具有锋利端30和不锋利/钝端32的神经生理测试工具形式的医学设备的第三示例。材料结构包括在锋利端30与工具的被抓握的区域35之间的第一部分34、以及在钝端32与工具的被抓握的区域35之间的第二部分36。
57.材料结构可以被永久地固定在适当位置,或设计可以是模块化的,使得具有期望的力传递函数的模块可以附接到抓握区域35,以允许测试不同的患者感觉力阈值或其他力参数变化。
58.图4示出了根据本发明的具有材料结构40的通用工具形式的医学设备的第四示例,材料结构40被形成为可以应用在现有的未修改工具42(作为示例示出为神经生理测试工具)的外部周围的模块。施加到抓握区域44并且然后通过材料的超过期望阈值的压力将引起抓握部的变形。这种抓握结构可以应用于任何现有的锋利/钝的测试工具,或得也可以应用于所施加的压力应当受到限制的其他设备。
59.图4中的示例使用压缩屈曲,但是示例可以使用剪切屈曲。在这种情况下,材料结构可以经由摩擦沿着工具的整个长度附接,并且抓握区与工具轴之间的剪切力将引起单元格层的屈曲。通过施加不同力阈值的抓握,简单的神经测试工具可以用于若干力阈值灵敏度测试。
60.材料结构是所谓的力学超材料的示例。可以使用算法设计过程来产生具有可定制且奇异机械性质的力学超材料。这些包括在各种负载条件下使结构弹性变形使得力以预定路径承载的能力、以及产生根据所施加的力的方向而非常不同地表现的材料(机械上非往复)的能力。
61.已经表征了现有的超材料,其中,高于所选阈值的任何力都引起材料变形而不是进一步的力传递。这是上述示例中使用的主要材料性质。
62.例如,文章"mechanical performance of multidirectional buckling-based negative stiffness metamaterials:an analytical and numerical study"(materials
(basel)2018jul;11(7):1078(doi:10.3390/ma11071078))公开了一种装置,通过该装置使用具有屈曲点的内部弯曲梁来实现力阈值变形行为。梁的屈曲力阈值由梁的曲率、长度、刚度和厚度性质控制。然后可以串联地布置多个屈曲单元,以在冲击期间实现相对一致的力输出,该力输出直到结构触底才增加超过初始阈值。
63.这些效果通过控制材料的内部结构来实现。在整个材料中单独控制诸如支柱角度、厚度、长度和刚度的性质允许产生具有奇异机械性质的材料。
64.可以使用诸如机器学习的现有设计过程来设计具有某些目标性质的超材料,其可以用于探索大的参数设计空间,并且甚至从头开始设计超材料结构。此外,试错参数探索方法可以用于在给定的一组约束内优化设计,诸如具有一些可调参数的初始超材料重复单元的设计。
65.单元可以由支柱(诸如立方体)形成。这些单元是以重复的方式。对于给定的重复单元,诸如具有特定弯曲动力学的立方体,可以使用fem模型(或其他建模技术)来模拟单元的可调参数(支柱参数、单元尺寸等)的各种布置、以及相对于特定应用的物理约束的块体模块的参数(单元的数量和物理布置)。
66.力施加场景可以以这种方式模拟,并相对于期望的参数进行分析。可以使用蒙特卡罗或其他参数优化过程来有效地探索解空间。
67.例如,在上面引用的文章"mechanical performance of multidirectional buckling-based negative stiffness metamaterials:an analytical and numerical study"中展示了一系列可能的力传递函数。一旦最大数量的层已经塌缩,材料控制力施加的能力就停止。然而,示出了可以用大量层实现相当平坦的力响应。力传递函数的实际可实现的平坦度将由制造过程的能力确定(理论上仅在无限层的情况下可实现完全平坦的响应)。因此,由材料结构执行的力缓冲的范围被选择为落入通常由设备(例如gp)的用户施加的范围内。
68.图5示出了简单线性力限制结构的示例结构。在顶部处示出的基本设计构建块50是由支柱52形成的立方体(或长方体)。重复该单元结构以形成层状的更大材料结构54,如向下的第二图像中所示。当施加力时,一旦达到力阈值,立方体就逐层变形,如底部图像所示。
69.立方体的高度例如为0.1至10mm。该尺度的更大端可能生产起来成本效益更高,但将导致更少的平坦力响应曲线。支柱的尺寸将取决于所使用的材料及其性质。它也将根据立方体尺寸而改变。为了允许每个立方体的高度有足够的能力塌缩,支柱的宽度必须优选地小于立方体高度的25%(两个这样的支柱的宽度将占据总立方体高度的50%,留下50%的可塌缩空间)。
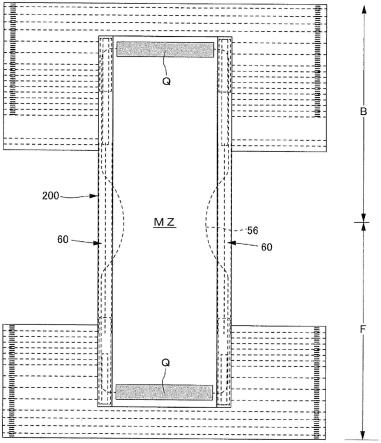
70.图5还示出了传感器56可以集成到结构中。
71.例如,应变传感器可以附连到结构的对接触区处的压力条件高度响应的区域中的任何支柱或多个支柱。这可以例如在将发生弯曲的支柱的中间部分上。
72.为了实用,材料结构可以涂覆在外膜中以防止灰尘进入等。如果该膜的力学也包括在材料设计过程中,则它也可以形成传感器可以附接到的合适且可接近的基底。
73.包括3d打印的新制造技术实现了具有复杂内部结构的材料(包括力学超材料)的快速且廉价的生产。该领域的一个关键发展是全息打印,其允许同时打印整个3d结构,从而
显著减少打印时间。
74.现在将参考图6描述用于材料结构的设计和制造系统。
75.材料结构60用于力学刺激递送,并且它具有定制的内部结构性质62,使得它转换不受控输入力的性质,以便递送具有期望且一致的力施加性质64的力学刺激。
76.如在上面的一些示例中所讨论的,力施加性质可以包括:
77.(i)将力幅值限制在某一阈值以上的力传递函数。
78.(ii)所递送的力对力施加角度的依赖性。例如,如果使用不正确的施加角度,则结构可能在低力阈值下变形,从而阻止成功的反射响应发生。
79.(iii)所递送的力对力施加面积的依赖性。在大多数情况下,该面积将由材料结构的接触区的尺寸限定。优选地控制力施加的压力作用,这对于在患者组织中产生受控拉伸效果是至关重要的。还可以存在接触面积大于力施加面积的示例,其中,以不同方式施加在材料结构上的压力引起比接触面积更小的力施加面积。例如,立方体(或其他形状)围绕力施加轴线的向内塌缩可以改变面积,并且引起材料结构的一个区域变得比它周围的塌缩区域更强。
80.(iv)所递送的力对力施加的时间动态的依赖性。这可以用于对施加力的生物组织产生受控影响。例如,在用反射锤敲击期间组织处于最大拉伸的时间可能是影响反射响应的重要因素。
81.(v)对于受控刺激递送可能期望的其他约束。
82.材料结构具有复杂的内部结构,通常包括如上所述的重复或非重复单元。在最简单的实施例中,仅采用重复单元。这些单元具有形成内部结构性质62的限定的结构性质和结构布置,其导致材料结构60的紧急力施加性质64。这些性质可以包括例如由连接立方体形状的角的梁组成的重复立方体单元的性质,其中,各个梁具有以下性质:
83.梁长度;
84.梁曲率;
85.梁厚度;
86.梁材料/刚度。
87.材料结构可以包括相对于材料结构内或上的接触区放置在远程位置处的传感器66。这些传感器66测量与材料结构在接触区处的力相关的物理参数(“测量的物理参数”)。
88.传感器使得反馈能够被提供给用户。
89.这些传感器可以是数字传感器,诸如拉伸传感器、压力传感器和声传感器或其他数字传感器。它们可以是模拟传感器,例如响应于应力而改变颜色的材料。因此,可以通过结构变形给予用户视觉反馈。
90.设计算法70用于设计内部结构性质,使得力施加性质通过材料结构来实现。设计算法可以包括用户界面72,使得用户可以输入限制设计空间的约束。这些输入可以由人类设计者输入,并且限定设计过程的初始约束,诸如材料结构外部形状和尺寸的尺寸、以及可接受的力施加性质或可接受的力范围。
91.期望的力施加性质可以包括在与实施场景相关的指定条件下的期望行为,诸如力在限定条件下达到但不超过指定的响应力值。
92.限定条件的示例是材料结构应当在以1m/s行进的不受约束的100g质量和可压缩
表面(具有人体组织的性质)之间被压缩,其中,运动是正交的。这是可以类似于反射锤的冲击的示例性场景。如果运动是非正交的,例如,发生在距垂直大于10度处,则当超过该角度施加输入力时,可以定义新的最大力阈值并且因此定义材料行为。
93.还存在传感器相关的约束,诸如传感器的数量、测量的物理参数和传感器的位置。
94.为了实用性,可以定义其他限制条件,诸如总材料结构重量、有限的材料选项或其他性质。
95.模拟算法74模拟具有内部结构性质的可能组合的材料结构,并生成所得材料对物理相互作用的响应(“响应数据”)。模拟物理力的性质由初始约束限定。
96.主算法76评估模拟的材料结构性能相对于在初始约束中限定的期望的力施加性质的质量。因此,每个模拟材料结构(由内部结构性质的组合限定)将被给予性能分数,该性能分数可以例如是0和1之间的数字。
97.当不同可能设计的评分完成时,参数选择算法78选择要被模拟和制造的内部结构性质的组合。在步骤79中进行制造。
98.任选地包括传感器模拟算法80以计算预期的传递函数,该预期的传递函数定义了传感器位置处的模拟的测量的物理参数与接触区处的接触力之间的对应关系。传感器传递函数被存储在传感器传递函数数据库82中。
99.传感器校准算法84从由传感器收集的测量的物理参数确定接触区处的实际物理参数(例如,在主要实施例中施加的力)。因此,在制造结构的使用期间采用传感器,并且模拟过程使得测量的传感器信号能够被转换为实际施加的力特性。
100.图7示出了设计方法。
101.在步骤90中,用户经由用户界面输入初始约束。
102.设计算法根据其内部结构性质为材料结构产生适当的设计,由此在步骤92中,参数选择算法随机地选择一组初始内部结构性质。
103.在步骤94中,模拟算法通过使用标准fem建模软件来模拟具有所选择的内部结构性质的材料结构。产生材料结构的模型,其中,单元暴露于从初始约束导出并且反映材料结构的实施场景的模拟力。
104.通过提取模型内感兴趣区域的建模力而从软件生成响应数据。在主要实施例中,这些报告器位置和属性将反映期望的力施加性质的位置,因为它们在初始约束中被定义。例如,这些可以是:
105.在3维中测量力的接触区上的点;或
106.可以放置传感器的点(用户定义的)。
107.在步骤96中,主算法通过将响应数据与在初始约束中定义的期望力施加性质进行比较来计算材料结构分数。可以根据不同目标参数的数量来计算匹配的强度。
108.在步骤98中,参数选择算法然后选择一组新的内部结构性质用于模拟。
109.这些的选择将基于已经执行的所有模拟的材料结构分数。新集合的计算将由参数空间探索算法执行,以便使得能够以最小的计算工作量有效地找到最佳设计。示例是蒙特卡罗方法。该方法可以从步骤94重复,直到材料结构分数的增量变化已经降至预设水平以下。
110.然后在步骤100中选择具有最高材料结构分数的内部结构性质的组合用于制造。
111.传感器模拟算法在步骤95中确定传感器传递函数,例如通过确定必须应用于传感器的位置中的可测量力以匹配接触区中的感兴趣的力的倍增因子。还可以根据需要在数学上确定更复杂的传递函数。
112.传感器传递函数存储在传感器函数数据库中。然后在步骤102中通过诸如3d打印的制造方法在物理空间中产生设计。
113.在步骤104中,在所制造的设备的使用/测试期间应用传感器传递函数。在该使用期间,传感器收集测量的物理参数,并且传感器校准算法使用对应于材料结构实施例的传感器传递函数来校准传感器。
114.初始约束在上面被描述为经由用户界面的输入。另外,可以存在从gp交互的自动初始约束提取。例如,系统可以使用从gp手术收集的视频或其他数据,其中,测量医生和患者的物理交互以确定力施加参数和变化性。
115.该数据可以从位于gp工具上的适当的力传感器确定。这些计算可以一般地针对所有医生执行,或在每个医生的基础上个人地执行。然后可以将这些测量结果作为初始约束输入到设计算法。
116.在一些实施例中,初始约束可以不包含传感器的位置数据。这些可以算法地计算,其中,响应数据包括材料结构表面上的许多数据点。可以选择相对于施加在接触区处的力具有最大相关值的数据点作为传感器的位置,从而提供自动传感器位置检测。
117.总之,本发明提供了一种使用确保刺激施加不超过预设限制的力学材料结构的设备。过量的力可以以不影响关键刺激参数的方式消散(例如,弹性地消散或引导远离力施加区域)。
118.另外,可以通过放置在材料结构设计内的感测结构来测量刺激的关键力参数。材料结构的设计可以被构造为使得可以从远离力施加区域的位置监测特定的力施加参数。
119.材料结构具有用于力学刺激递送的体积,其具有定制的内部结构性质使得它转变非受控输入力的性质,以便递送具有期望且一致性质的力学刺激。设计算法确保材料结构的整体性质实现用于应用场景(诸如用于反射锤、手套、神经测试工具或其他gp-患者交互场景)的一组期望性质。
120.本发明可以用于需要将力限制到预定水平的任何应用。这在施加的力经历显著变化(例如通过人为错误)的应用中是重要的。将该系统应用于诊断工具允许医生确定所施加的力的确切幅度,而不管由医生施加的力的变化。由此可以得出关于患者对所施加的刺激的响应的更客观结论。
121.除了消除力输入变化性(在施加的力的合理范围内)之外,如上所述,由于在不同的力施加角度下材料的差异行为,也可以消除刺激角度变化性。远距离传感器的放置为待放置的传感器提供了更大的区,并且防止感测结构干扰所施加的力。
122.本发明通过提供可以添加到现有工具中的模块而使得这些工具能够被使用。因此,医生可以使用具有添加功能的熟悉形状因子。
123.本领域技术人员通过研究附图、公开内容以及权利要求,在实践请求保护的发明时能够理解并实现对所公开的实施例的变型。在权利要求中,“包括”一词不排除其他元件或步骤,并且词语“一”或“一个”不排除多个。
124.尽管特定措施是在互不相同的从属权利要求中记载的,但是这并不指示不能有利
地使用这些措施的组合。
125.如果术语“适合于”用于权利要求书或说明书中,应注意术语“适合于”旨在相当于术语“被配置为”。
126.权利要求中的任何附图标记都不应被解释为对范围的限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。