1.本实用新型涉及传动装置技术领域,具有涉及一种导向轮和水下清理机器人。
背景技术:
2.水闸门是一种用于水下起封闭和隔绝作用的闸门。闸门密封主要是闸门靠水流进水下流侧四周的密封条受海水压力挤压形成密封,其密封区域主要有两侧轨道靠闸门密封条侧、门楣和闸门底部。而水闸门的密封区域处于水下,因此会有大量的水生物和杂物附着于表面,尤其是用于海水中的闸门,例如px 海水泵站的水闸门用于循环水过滤系统px泵房进水渠道处,用于隔离进水渠道,由于海水中的贝类生物会在闸门处的密封区域大量黏附,使得水闸门无法关闭到位,密封区域不能有效密封,进而造成水体泄露。
3.因此需要定期对水闸门的密封区域闸门槽、门楣和闸门底部进行清理。现有的清理方式包括人工清理和机器人清理。其中人工清理时间长,并且清理人员在水下清理存在安全风险,而现有的机器人清理则存在稳定性差,在移动过程容易卡死,容易卡死的原因之一是由于滑块的导向方式灵活性差。
技术实现要素:
4.鉴于上述现有技术的不足之处,本实用新型的第一目的在于提供一种导向轮,能够提供一定的弹性来适应安装空间。
5.该方案具体如下:
6.一种导向轮,用于水下清理机器人的导向,包括支撑部,弹性部,滚动部和安装部;
7.所述支撑部用于所述弹性部和滚动部的支撑;
8.所述弹性部位于所述滚动部的侧面,所述弹性部与所述滚动部相连;
9.所述滚动部为转动部件,所述滚动部的转动中心的位置可通过所述弹性部发生改变;
10.所述安装部与所述支撑部相连,所述安装部用于导向轮与水下清理机器人的连接。
11.进一步地,所述支撑部包括贯通的安装空间,所述安装空间用于所述滚动部的安装,所述安装空间的侧面设有凹槽,所述凹槽用于所述弹性部的安装。
12.进一步地,所述滚动部包括轮体和转轴,所述转轴穿过所述轮体,所述轮体以所述转轴为转动中心转动,所述转轴伸入所述凹槽内,所述转轴与所述弹性部相连。
13.进一步地,所述轮体的直径大于所述安装空间的两端开口之间的宽度。
14.进一步地,所述弹性部包括导向柱和弹簧,所述弹簧套设于所述导向柱,所述弹簧一端与所述转轴固定连接,所述弹簧的另一端与所述凹槽表面固定连接,所述导向柱的一端与伸入凹槽中的转轴固定连接,所述导向柱的另一端与所述凹槽表面活动连接,所述导向柱在所述凹槽内做伸缩运动。
15.进一步地,所述弹性部包括导向柱和弹簧,所述导向柱固定于所述凹槽内,所述导
向柱贯穿位于所述凹槽内的转轴,所述转轴可沿所述导向柱做往复运动,所述弹簧套装于所述导向柱,所述弹簧一端与转轴固定连接,另一端与所述凹槽表面固定连接。
16.进一步地,所述弹性部的数量为两个,分别位于所述滚动部的两侧。
17.进一步地,所述安装部位于所述安装空间的侧面,或者位于所述安装空间的开口。
18.进一步地,所述安装部包括安装台阶,所述安装台阶上设有螺纹孔。
19.相应地,还提供一种水下清理机器人,用于泵房闸门槽清理,包括框架和上述的导向轮,所述导向轮与所述框架相连,所述导向轮工作时与闸门槽的表面接触。
20.与现有技术相比,本实用新型具有以下的有益效果:
21.本实用新型提供的导向轮,通过滚动部实现对闸门槽的表面的滚动接触,可以减少摩擦力,通过弹性部可以实现滚动部在支撑部内的位移,进而实现导向轮在闸门槽内时对闸门槽表面贴紧,避免因闸门槽尺寸精度不高而产生卡滞,并且弹性部设于滚动部的侧面,结构更加紧凑,可以减小导向轮的占用空间,因此导向轮适用于狭小空间内的安装和使用。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
23.图1为本实用新型实施例导向轮结构示意图;
24.图2为本实用新型实施例导向轮俯视图;
25.图3为本实用新型实施例导向轮侧视图;
26.图4为本实用新型实施例水下清理机器人示意图;
27.图5为本实用新型实施例水下清理机器人工作示意图;
28.图6为图4的局部放大图;
29.图7为本实用新型实施例水下清理机器人另一视角图;
30.图8为图7的局部放大图;
31.图9为本实用新型实施例水下清理机器人的剖视图;
32.图10为图9的局部放大图;
33.图11为本实用新型实施例第一种导向轮组示意图;
34.图12为本实用新型实施例u型槽内导向轮组示意图;
35.图13为本实用新型实施例第二种导向轮组示意图;
36.图14为本实用新型实施例t型槽内导向轮组示意图;
37.图15为本实用新型实施例第二清理组件示意图;
38.图16为本实用新型实施例第二清理组件侧视图;
39.图17为本实用新型实施例摄像组件示意图;
40.图18为本实用新型实施例摄像组件剖视图;
41.图19为本实用新型实施例摄像组件分解图;
42.图20为本实用新型清理方法实施例流程图。
43.附图标记:
44.10-导向轮;11-第一导向轮;12-第二导向轮;20-连接部;100-导向组件; 101-导向轮组;110-支撑部;111-安装空间;112-凹槽;120-弹性部;121-导向柱;122-弹簧;130-滚动部;131-轮体;132-转轴;140-安装部;141-安装台阶; 200-框架;201-第一侧边;202-第二侧边;203-悬挂吊耳;204-齿条;205-导轨; 300-第一清理组件;301-第一管路;302-第一喷头;303-第二喷头;400-第二清理组件;410-支架;411-通孔;420-传动组件;421-动力元件;422-齿轮;423
‑ꢀ
轮子;430-清理组件;431-第二管路;432-第三喷头;433-第四喷头;440-防卡组件;441-第三管路;442-第五喷头;450-拖链;460-声呐组件;461-工作台; 461a-第一转轴;461b-第二转轴;462-声呐;500-照明组件;600-摄像组件;610
‑ꢀ
壳体;611-密封垫圈;620-摄像组件;621-摄像头;622-基座;623-转动组件; 623a-动力件;623b-转动件;624-伸缩组件;625-通信组件;626-控制组件;630
‑ꢀ
凸形弧面罩;640-滤光组件;650-水密插头线缆;1000-闸门;1001-闸门槽; 1002-门楣;1003-底面;a-第一表面;b-第二表面。
具体实施方式
45.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
46.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
47.还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
48.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
49.图1-3为本实用新型导向轮实施例的示意图。
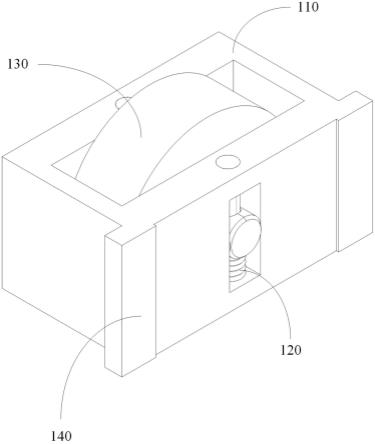
50.请参考图1-3,为一种导向轮实施例,用于水下清理机器人的导向,该实施例包括支撑部110,弹性部120,滚动部130和安装部140。其中,支撑部 110用于弹性部120和滚动部130的支撑,弹性部120位于滚动部130的侧面,弹性部120位于滚动部130的侧面,可以减小安装空间,使得导向轮体积减小,因此导向轮可以适用于狭小空间内的使用,例如用于水下清理机器人在闸门槽内的导向。弹性部120与滚动部130相连,在弹性部120的弹力作用下,滚动部130于支撑部110中可以进行一定的位移,进而提高导向轮的灵活度。安装部140与支撑部110相连,安装部140用于导向轮与水下清理机器人的连接。
51.本实施例中,支撑部110包括贯通的安装空间111,安装空间111具体为两头贯通四
周封闭的筒状结构,安装空间111用于滚动部130的安装,滚动部 130在安装空间111中滚动,安装空间111的侧面设有凹槽112,凹槽112用于弹性部120的安装,支撑部110的结构与弹性部120位于滚动部130侧面的结构相适应。
52.本实施例中,滚动部130包括轮体131和转轴132。其中轮体130为常规圆形轮子,转轴132穿过轮体131中心,轮体131以转轴132为转动中心转动,轮体131位于安装空间111中,转轴132伸入支撑部110的凹槽112内,进而与凹槽112内的弹性部120连接,转轴132在弹性部120的作用下能够于凹槽 112内产生一定的位移,进而带动与转轴132相连的轮体131在安装空间111 内产生相应地位移。并且,轮体131的直径大于安装空间111的两端开口之间的宽度,以确保轮体131的外径表面始终伸出安装空间111的两端开口,这样导向轮在使用工作过程中,轮体131始终与工作表面接触,工作表面具体可以是闸门槽的表面。
53.本实施例中,弹性部120包括导向柱121和弹簧122,导向柱121固定于凹槽112内,并且导向柱121贯穿位于凹槽112内的转轴132,转轴132可沿导向柱121做往复运动,弹簧122套装于导向柱121上,弹簧122一端与转轴 132固定连接,另一端与凹槽112表面固定连接。本实施例中弹性部120的数量为两个,分别位于滚动部130的两侧,为对称设置,这样滚动部130的受力更加均匀,不易发生损坏。当轮体131受到外力作用时,转轴132跟随轮体131 同步运动,转轴132沿导向柱121发生位移,进而拉伸或压缩与其相连的弹簧 122,当外力消失时,轮体131在弹簧122的弹性作用下恢复原位,进而完成导向和限位的作用。以水下清理机器人为例,水下清理机器人用于闸门槽的清理,导向轮安装于水下清理机器人上,用于水下清理机器人在闸门槽内运动时的导向,导向轮与闸门槽表面接触,水下清理机器人在水下工作遇到水流作用晃动时,由于导向轮具有形变能力可以跟随水下清理机器人晃动,平衡水流作用的晃动力,避免水下清理机器人在闸门槽中运动的卡涩,确保清理过程的流畅性。在其他实施例中,设置方式可以有所不同,弹簧122套设于导向柱121,弹簧122一端与转轴132固定连接,弹簧122的另一端与凹槽112表面固定连接,导向柱121的一端与伸入凹槽112中的转轴132固定连接,导向柱121的另一端与凹槽112表面活动连接,导向柱121可以穿过凹槽112表面内做伸缩运动。
54.本实施例中,安装部140位于安装空间111的侧面,或者位于安装空间111 的开口侧,以适用不同角度的安装。安装部140包括安装台阶141,安装台阶 141上设有螺纹孔。
55.综上所述,本实用新型提供的导向轮实施例,通过滚动部实现对闸门槽的表面的滚动接触,可以减少摩擦力,通过弹性部可以实现滚动部在支撑部内的位移,进而实现导向轮在闸门槽内时对闸门槽表面贴紧,并且弹性部设于滚动部的侧面,结构更加紧凑,可以减小导向轮的占用空间,因此导向轮适用于狭小空间内的安装和使用。
56.图4-19为本实用新型水下清理机器人实施例的示意图。
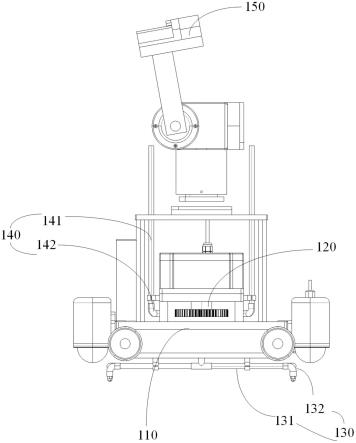
57.请参考4-19,为一种水下清理机器人实施例,用于清理泵房闸门1000的密封区域,闸门的密封区域包括闸门槽1001、门楣1002和底面1003,该实施例包括导向组件100,框架200,第一清理组件300,第二清理组件400。其中,框架200与闸门1000的长度和宽度相匹配,框架200的形状为矩形,框架200 包括两条平行的第一侧边201和两条平行的第二侧边202,框架200于闸门槽 1001内运动时,第一侧边201位于闸门槽1001内,第二侧边202与闸门1000 的门楣1002或底部1003平行。导向组件100与第一侧边201相连,导向组件 100工作时与闸门槽1001的表面滚动接触,滚动接触可以减少框架在闸门槽 1001中运动的摩擦力,提
高框架200在闸门槽1001中运动的顺畅度,避免水下清理机器人在水流作用下晃动造成的卡死现象。第一清理组件300与第一侧边201相连,第一清理组件300用于清理闸门槽1001的表面。第二清理组件 400与第二侧边202相连,第二清理组件400用于清理闸门1000的门楣1002 和底部1003。通过第一清理组件300和第二清理组件400实现对闸门1000的所有封闭区域进行清理,确保密封区域的密封性,避免闸门1000漏水。
58.本实施例中,框架200由多根杆组合而成,可以减少水下清理机器人的重量,杆之间的空间可以供液体流过,减少水下清理机器人在水下的运行阻力。框架200的第一侧边201的长度大于第二侧边202的长度,这种高度大于长度的设计能够避免水下清理机器人在闸门槽1001发生倾斜,避免水下清理机器人在闸门槽1001卡涩,进而避免可预见的重大事故。框架200顶部设有悬挂吊耳203,悬挂吊耳203的数量为两个,在框架200顶部以框架200中心为轴对称分布,悬挂吊耳203用于将水下清理机器人与吊缆装置的连接。
59.本实施例中,导向组件100包括若干个导向轮组101,具体地,本实施例中的导向轮组101的数量为六组,导向轮组101均匀分布于框架的第一侧边201,每条第一侧边201分布有三组导向轮组101,三组导向轮组101分别分布于第一侧边201的顶部、中部和尾部。导向轮组101包括若干个导向轮10,导向轮 10与闸门槽1001的侧面和底面接触,导向轮10为可伸缩导向轮,因此框架 200在水流作用下晃动时,导向轮10可以对应发生一定的位移,抵消水流的作用力,下面具体说明。
60.如图11-12所示,为第一种导向轮组的结构示意图,适用于形状为u形的闸门槽1001。导向轮组201包括若干个导向轮10和连接部20。连接部20用于连接若干个导向轮10,连接部20具体可以为水下清理机器人的框架。导向轮10包括用于第一方向导向的第一导向轮11,第一导向轮11的数量至少为二个,第一导向轮11工作时的轮面与闸门槽的第一表面a接触。第一表面可以为闸门槽的侧面或者底面,本实施例中的第一表面a为闸门槽的侧面,第一导向轮11与闸门槽的侧面紧密贴合,实现安装有第一导向轮11的装置或设备于闸门槽内在侧面方向的位移限制,从而起到导向的作用,避免闸门槽中的装置或设备晃动,进而避免闸门槽中的装置或设备运行过程中卡死现象的发生。
61.第一导向轮11的数量为两个,两个第一导向轮11平行设置,两个第一导向轮11工作时的轮面分别与两个平行的第一表面a接触。两个平行的第一表面a为u型闸门槽的两侧边,两个第一导向轮11安装于水下清理机器人的框架上,用于水下清理机器人框架在闸门槽内侧面方向的位移。
62.导向轮10还包括用于第二方向导向的第二导向轮12,第二导向轮12的数量至少为一个,第二导向轮12工作时的轮面与闸门槽的第二表面b接触,第二表面b与第一种实施例中的第一表面a垂直。本实施例中的闸门槽为u型槽,其中第一表面a为闸门槽的侧面,第二表面b为闸门槽的底面。
63.具体地,第一导向轮11的数量为两个,第二导向轮12的数量为一个,两个第一导向轮11平行设置,第二导向轮12位于两个第一导向轮11之间,第二导向轮12与第一导向轮11相互垂直。两个第一导向轮11工作时的轮面分别与两个平行的第一表面a接触,第二导向轮12工作时的轮面与第二表面b 接触。第一导向轮11和第二导向轮12安装于水下清理机器人的框架上,用于水下清理机器人框架在闸门槽内侧面和底面方向的位移。
64.若将上述闸门槽的类型替换为t型槽1001,则如图13-14所示,第一导向轮11的数
量为两个,第二导向轮12的数量为两个,两个第一导向轮11平行设置,两个第二导向轮12平行设置,并且第一导向轮11与第二导向轮12相互垂直,第一导向轮11位于两个第二导向轮12之间。t型槽内具有一隔板,两个第一导向轮11分别隔板的两侧面接触,两个第二导向轮12位于隔板两侧,分别与闸门槽的底面接触。第一导向轮11和第二导向轮12安装于水下清理机器人的框架上,用于水下清理机器人框架在闸门槽内侧面和底面方向的位移。
65.本实施例中,第一清理组件300包括第一管路301,第一管路301的起始段连接动力泵,第一管路301的末尾段水平贴合框架200,末尾段位于第一侧边201的底部,第一管路301的末尾段连接第一喷头302和第二喷头303,第一喷头302朝向闸门槽的侧面,第二喷头303朝向闸门槽的底面,第一喷头302 的喷射方向为闸门槽的侧面,第二喷头303的喷射方向为闸门槽的底面。
66.本实施例中,如图15-16所示,第二清理组件400位于框架200的底部,用于闸门1000的门楣1002和底部1003清理。第二清理组件400包括支架410,传动组件420,清理组件430和防卡组件440。其中,支架410用于传动组件 420、清理组件430和防卡组件440的支撑和连接。传动组件420用于带动支架410以及和支架410连接的相关组件在水中做往复运动。清理组件430对闸门的底部或门楣进行清理,在传动组件420的带动下,清理组件430实现沿闸门底部或门楣移动,实现对闸门底部或门楣的逐步清理以及重复清理。防卡组件440与支架410相连,防卡组件440在传动组件420的作用下跟随支架410 和清理组件430同步运动,防卡组件440作用于传动组件420,对传动组件420 运行过程中的杂物进行清理,避免杂物卡入传动组件420中,避免传动组件420 由于杂物造成的工作停止,可以确保清理组件430的工作效率。
67.具体地,本实施例中的支架410为矩形,支架410的宽度与清理机器人底部的宽度大小相适应。支架410采用耐腐蚀的材质制成,以适应水下尤其是海水环境下的工作。支架410表面具有多个通孔411可供水体穿过,减少阻力大小,并且还可以减少支架410的自身重量,从而减轻传动组件420的运载负担。
68.本实施例中,传动组件420包括动力元件421、齿轮422和轮子423。其中动力元件421具体采用水下直流无刷电机,轴承使用耐海水腐蚀的陶瓷轴承,电机作防水设计,可在水深100m环境下正常工作。采用防水直流电机相比于采用液压马达方式,可以避免液压油泄漏对水环境和下游换热器及仪表的污染;电机控制系统比液压控制系统简单可靠,不需要相对复杂的液压泵油管路系统、各种阀门控制等,工作稳定性高。动力元件421位于支架410的上方,并且与支架410固定连接,动力元件421的动力输出端朝下,动力输出端与齿轮422 相连,带动齿轮422转动。齿轮422位于动力元件421与支架410之间,齿轮 422为水平设置,其端面与水平面平行,其齿槽呈竖直状态,这样水中的杂物不易在齿槽中堆积。齿轮422与清理机器人底部设置的齿条204啮合,动力元件421带动齿轮422转动,齿轮422沿齿条运动,进而带动支架410以及与支架410相连的相关组件在清理机器人的底部运动。本实施例中的轮子423数量为四个,分布于支架410的两侧边,在齿轮422和齿条传动过程中,轮子423 于清理机器人底部的导轨205中滚动,导轨205与齿条平行设置,轮子423具有支撑支架410的作用,以及限定支架410在清理机器人底部运动方向的作用。
69.本实施例中,清理组件430包括第二管路431,第三喷头432和第四喷头 433,第二管路431的起始段与动力泵连通,动力泵位于岸基,具体采用空化动力泵,第二管路431的末
尾段与第三喷头432和第四喷头433连通,第三喷头432与第四喷头433跟随支架410同步运动。
70.具体地,第二管路431的末尾段位于支架410的下方,与支架410平行设置,第二管路431的末尾段由两段管路组成,两段管路平行设置。其中一段管路与第三喷头432连接,第三喷头432的数量为两个,分布于支架的前后方向,第三喷头432朝向闸门底部,喷射方向为竖直方向,用于闸门底部清理。剩余一段管路与第四喷头433相连,第四喷头433的数量为两个,分布于支架的前后方向,第四喷头433朝向闸门门楣,喷射方向为水平方向,用于闸门门楣的清理。本实施例中第三喷头432和第四喷头433的数量可以根据实际情况进行选择,并不限定为两个,本实施例中的数量仅用作说明。
71.本实施例中,第二管路431的末尾段要高出水下清理机器人的框架200的高度,避免框架对第二管路431所连的第三喷头432和第四喷头433产生干涉。
72.本实施例中,防卡组件440包括第三管路441和第五喷头442,第三管路 441的起始段与动力泵连通,动力泵位于岸基,具体采用空化动力泵,第三管路441的末尾段与第五喷头442连通,第五喷头442跟随支架410同步运动,第五喷头442具体采用空化射流喷头。第五喷头442朝向传动组件120,用于传动组件120中的杂物清理,具体地,第五喷头442朝向齿轮122和齿条204 的啮合处,第五喷头442的水流喷射里将齿轮122和齿条啮合处的杂物冲走,避免齿轮122和齿条在啮合时由于杂物存在导致的卡涩现象,确保了清理装置清理过程的流畅度和效率。
73.上述实施例中的动力泵采用空化动力泵,第一管路301、第二管路431和第三管路441为空化软管,第一喷头302、第二喷头303、第三喷头432、第四喷头433和第五喷头442具体采用空化射流喷头。在以海洋设施为主的水下设施清洗领域中,空化射流清洗技术较高压水清洗技术更为高效、节能,并能有效保护设施表面的防腐层,是海洋水下设施清洗更为合理的选择。空化射流水下清洗装置是空化射流发生系统(空化动力泵站)、控制系统(机械控制)、电气控制、空化射流清洗喷头组成。空化动力泵站用于增加水压或其他液体压力,并将水流输送到执行系统。空化射流喷头由控制阀、喷杆和喷嘴总成(包括一列或多列喷嘴)等组成的空化射流装置。它通常通过空化软管总成与空化动力泵站输出端的调压装置直接连接。组合式卸荷型空化喷枪,可根据需要安装不同长度枪管,专为清洗小面积的曲线、曲面和柱面,以及难以清洗到的孔洞,利用后置喷头来抵消后坐力,射流压力根据需要可在0-25mpa之间调节。
74.本实施例中,还包括拖链450,拖链450与支架410连接,拖链450用于第二管路431、第三管路441和线路的收纳,拖链450跟随支架410做伸缩运动。拖链450起到收纳和保护线路管道的作用。
75.本实施例中,还包括声呐组件460,声呐组件460可以对底部轨道实时监测对底距离,保护清理装置和清理机器人,避免与底部轨道冲撞,造成损坏。声呐组件460位于动力元件421之上,与支架410相连。具体地,声呐组件460 包括工作台461与声呐462,声呐462位于工作台461上,工作台461与支架 410固定连接,工作台461可以进行大角度范围内的旋转,进而实现声呐462 多方位的检测。工作台461包括第一转轴461a和第二转轴461b,第二转轴461b 与第一转轴461a垂直相连,第二转轴461b跟随第一转轴461a转动,第一转轴461a实现水平方向的360度旋转,声呐462与第二转轴461b相连,声呐462 跟随第二转轴461b转动,第
二转轴461b实现竖直方向大角度的旋转。
76.本实施例中,还包括接近开关(未示出)和拉线式编码器(未示出),接近开关和拉线式编码器与支架410相连。接近开关用于清理机器人的框架检测边缘,避免清理装置在清理机器人框架底部运行时撞击到两侧的框架,对清理装置造成损坏,拉线式编码器用于获取清理装置的行进位移大小,实现对清理装置的定位。
77.本实施例中,还包括照明组件500和摄像组件600,照明组件500和摄像组件600分布于第一清理组件300和第二清理组件400,摄像组件600用于获取闸门槽图像、闸门门楣图像或者闸门底部图像。其中摄像组件600的数量为六个,其中两个分别设于支架410的前后两端,与支架410固定连接,用于获取闸门门楣或底部的图像,进而判断清理情况以及清理装置的运行状态,剩余四个分布于框架200的第一侧边201,与第一清理组件300位于临近区域,用于获取闸门槽的图像。对应地,照明组件500的数量为六个,与摄像组件600 对应设置,用于照明,为摄像组件600提供光照,以获得清晰图像。
78.具体地,如图17-19所示,摄像组件600包括壳体610、摄像组件620和凸形弧面罩630。其中,壳体610与凸形弧面罩630构成一密闭空间,摄像组件620位于密闭空间内,凸形弧面罩630为透光体,摄像组件620通过凸型弧面罩630获取水下图像。凸形弧面罩630具体为一种半圆形玻璃罩。摄像组件 620安装于水下清理机器人上,跟随水下清理机器人运动时,凸形弧面罩630 在运动过程中会排开其周边的杂物,避免水下杂物在摄像组件620前面堆积,影响成像效果。
79.摄像组件620包括摄像头621、基座622、转动组件623、控制组件626、伸缩组件624和通信组件625。其中摄像头621与凸形弧面罩630相对设置,摄像头621可伸入到凸形弧面罩630所围成的空间内,因此可以扩大摄像头621 的视野范围。转动组件623与壳体610的底部固定连接,转动组件623与基座 622相连,转动组件623带动基座622转动,基座622与伸缩组件624相连,伸缩组件624与摄像头621相连。转动组件623带动基座622转动,进而带动基座622上的摄像头621转动,以实现摄像头621的俯仰调节,调节角度范围为90
°
。伸缩组件624带动摄像头621做伸缩运动以实现变焦,可遥控5倍光学变焦,本实施例中伸缩组件624具体为两相四线步进微型马达。控制组件626 设于基座622上,控制组件626分别与摄像头621、转动组件623和伸缩组件 624相连,控制组件626用于各组件的控制和数据处理。通信组件625设于基座622,通信组件625与控制组件626相连,用于摄像装置的通信。
80.具体地,本实施例中的转动组件623包括动力件623a和转动件623b,其中动力件623a与壳体610底部固定连接,动力件623a与转动件623b相连,动力件623a带动转动件623b转动,转动件623b与基座622相连。本实施例中,动力件623a具体包括金属微型减速器和非接触磁感应位置传感器,具有精度高尺寸小的优点。
81.本实施例中,还包括辅助照明组件(未示出),辅助照明组件(未示出) 位于壳体610内,辅助照明组件发出的光照射于凸形弧面罩630。具体采用 300k~5000k的色温的led灯珠作为辅助照明组件灯光照明光源,对水下图像的色彩还原效果最好,对水下图像背景细节的分辨率最高。单个照明强度为 5000流明,使用恒流驱动,通过pwm控制灯光强度。由控制系统对每个照明灯进行单独控制。根据实际工作环境下的水质条件和视频画质效果,可线性调节灯光强度从0~100%,减少悬浮物反射光强度,提高水下成像质量。
82.本实施例中,还包括滤光组件640,滤光组件640对摄像头621获取的光学信号进行
处理。采用绿光频段透过率高的滤光片作为感光自动切换,从而提高在水下环境中的图像清晰度。本实用新型摄像装置在室内游泳池清水环境中测试的可视距离超过3m。图像处理芯片为国产华为海思处理器,实现1080p 彩色高清图像的实时传输,传输带宽为100mbit/s。
83.本实施例中,还包括水密插头线缆650,摄像组件620的数据传输线通过水密插头线缆650从壳体610内接出,以保证壳体610内空间的密封。壳体610 底部设有底盖,底盖与壳体610的接合处设有密封垫圈611,壳体610与凸形弧面罩630的接合处设有密封垫圈611,通过密封垫圈611提升密封效果。
84.本实施例中,还包括惯导系统(未示出),惯导系统用于获取框架200的姿态,框架200姿态不正常时,通过吊缆装置及时进行调整,防止事故发生。
85.综上所述,本实用新型提供的水下清理机器人实施例,通过第一清理组件实现对闸门槽的清理,通过第二清理组件实现对闸门门楣和底部的清理,进而覆盖整个闸门的密封区域的清理,确保闸门密封区域的密封性,通过导向组件与闸门槽表面滚动接触,可以减少框架在闸门槽中运动的摩擦力,提高框架在闸门槽中运动的顺畅度,避免水下清理机器人在水流作用下晃动造成的卡死现象。
86.本实用新型还提供一种水下清理系统实施例,包括吊缆装置、岸基组件和上述实施例中的水下清理机器人,吊缆装置用于将所述水下清理机器人投放至水下或者从水下回收至岸基,水下清理机器人对闸门两侧门槽、门楣和底部进行清理,岸基组件用于控制水下清理机器人和吊缆装置,岸基组件与所述水下清理机器人进行通信。
87.图20为本实用新型清理机器人工作流程图。
88.请参考图20,包括以下步骤:
89.s100、第一清理步骤
90.水下清理机器人下行过程中,第一清理组件清理闸门两侧门槽。
91.s200、第二清理步骤
92.第二清理组件对闸门的门楣进行清理。
93.s300、第三清理步骤
94.第二清理组件对闸门的底部进行清理。
95.s400、姿态调整步骤
96.通过惯导系统结合吊缆装置对水下清理机器人的姿态进行调整。
97.具体地,第一清理步骤s100中,水下清理机器人通过吊缆装置运送至水下,水下机器人与闸门槽对齐后,沿闸门槽向下运动,同时第一清理组件开始工作,对闸门槽进行清理。
98.本实施例中,第二清理步骤s200之前还包括第一判断步骤s101,第一判断步骤s101具体包括:通过声呐组件、摄像组件和深度探测器判断水下清理机器人的第二清理组件是否到达第一预定位置,若到达第一预定位置,则暂停第一清理步骤s100,执行第二清理步骤s200。本实施例中的第一预定位置是指闸门的门楣,若通过声呐组件、摄像组件和深度探测器判断水下清理机器人下行至门楣位置,则停止清理机器人下行,并且停止第一清理组件的工作,启动第二清理组件,对门楣开始清理。
99.进一步地,在第二清理步骤s200中还包括第四判断步骤s201,第四判断步骤s201
包括:通过摄像组件判断闸门的门楣是否清理干净,若没有清理干净则重复执行第二清理步骤s200直至清理干净,若清理干净则停止第二清理步骤s200,执行第一清理步骤s100,清理机器人继续下行,第一清理组件重新工作,对闸门槽进行清理。
100.本实施例中,第三清理步骤s300之前还包括第二判断步骤s202,第二判断步骤s202包括:通过声呐组件、摄像组件和深度探测器判断水下清理机器人的第二清理组件是否到达第二预定位置,若到达第二预定位置,则暂停第一清理步骤s100,执行第三清理步骤s300。实施例中的第二预定位置是指闸门的底部,若通过声呐组件、摄像组件和深度探测器判断水下清理机器人下行至接近底部位置,则停止清理机器人下行,并且停止第一清理组件的工作,启动第二清理组件,对底部开始清理。
101.第三清理步骤s300在清理的同时执行第四清理步骤s301,第四清理步骤 s301对第二清理组件中的传动组件进行清理。通过防卡组件对第二清理组件中的传动组件进行清理,避免传动组件由于水中杂物造成卡涩,影响清理效率。具体是指通过防卡组件对传动组件中齿轮与齿条的啮合处进行清理。
102.进一步地,在第三清理步骤s300中还包括第五判断步骤s302,第五判断步骤s302包括:通过摄像组件判断闸门的底部是否清理干净,若没有清理干净则重复执行第三清理步骤s300直至清理干净,若清理干净则停止第三清理步骤s300。
103.本实施例中,还包括第三判断步骤s102,第三判断步骤s102包括:通过摄像组件判断第一清理步骤s100是否对闸门两侧门槽清理干净,若没有清理干净,水下清理机器人上行一定距离,重复执行第一清理步骤s100直至清理干净。
104.本实施例中,还包括投放步骤和回收步骤,投放步骤通过吊缆将水下清理机器人投放至水下,并控制水下清理机器人沿闸门槽运动,回收步骤在水下清理机器人清理结束后对水下清理机器人回收至水上。
105.本实施例中,姿态调整步骤s400包括:判断水下清理机器人在闸门槽中的姿态与预设姿态的偏差是否满足预定值,若不满足则对水下清理机器人的姿态进行调整。姿态参数具体包括水下清理机器人的倾斜角度等参数,通过吊缆装置对水下清理机器人的姿态及时进行调整,避免水下清理机器人在水下卡涩以及发生事故。
106.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型的实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。