1.本发明属于仿生机器人技术领域,具体涉及一种仿生蝠鲼。
背景技术:
2.蝠鲼优异的游动能力吸引了国内外众多研究者的关注,并相继研制成功了多种类型的仿生机器蝠鲼。根据驱动方式的不同,仿生机器蝠鲼大致分为两类:一类是采用电机驱动方式。此类仿生机器蝠鲼具有一定的机动能力和滑翔能力。但是,由于刚性结构的限制,其运动形式做了大量简化,导致游动性能与真实蝠鲼相差较大。另一类是采用sma、人工肌肉等新型材料驱动,新型材料驱动方式赋予仿生机器蝠鲼更多的自由度,使其更加接近真实蝠鲼的运动状态,获得更高的游动效率。但是,由于材料驱动能力有限,仿生机器蝠鲼的体积和速度受到了较大限制,同时不方便对海洋垃圾进行收集,另外使用时极其不稳定,增加了能量消耗,为此我们提出一种仿生蝠鲼。
技术实现要素:
3.本发明的目的在于提供一种仿生蝠鲼,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明提供如下技术方案:一种仿生蝠鲼,包括仿生推进式系统、喷射推进式系统和垃圾收集系统;
5.所述仿生推进式系统包括弦向波动模块和展向波动模块,所述展向波动模块用于控制所述仿生蝠鲼的胸鳍在展向上的正弦波动;所述弦向波动模块用于前后划分的上下鱼鳍通过舵机的摆动方向与相位的不同形成波动;
6.所述喷射推进式系统包括潜浮巡航交替模块、舵向模块、重力变化模块和导流模块,所述潜浮巡航交替模块设置为所述喷射推进式系统的核心,所述潜浮巡航交替模块用于实现喷射推进式行进与上下的电力推进式行进,所述舵向模块用于控制所述潜浮巡航交替模块的喷射方向,所述导流模块用于位移在巡航高速运动的过程中减少涡流的产生;所述重力变化模块用于调整重力,实现上浮与下潜;
7.所述垃圾收集系统包括负压吸水模块、单向导流模块和垃圾仓模块,所述负压吸水模块用于通过内部的负压机构实现负压腔的收缩,所述单向导流模块用于对水流方向进行单向导流,所述垃圾仓模块设置为可拆卸结构,所述垃圾仓模块包括垃圾仓、两侧的卡扣和内部的滤网。
8.优选的,所述展向波动模块是采用绳轮机构为主要原理的柔性机构,通过固定在绳轮上的拉绳的往复运动带动柔性鱼鳍运动。
9.优选的,所述弦向波动模块采用连杆机构的原理,通过舵机驱动连杆,连杆带动内边有八边形的摇杆进行摆动,且所述弦向波动由鱼鳍波动表达式决定。
10.优选的,所述潜浮巡航交替模块在推进式行进时流道为闭合状态,通过内部的两个水下推进式的驱动将水流通过前流道传输并从后流道中喷射出,通过已曲柄滑块机构为基础的连杆机构驱动前后流道的开合,中间的流道通过正弦机构带动剪式机构的原理驱动
中部上下流道的分离,完成中间水下推进器的转向避开空间,经过机构的复合运动与联动实现流道的变化与水下推进器的转向,实现浮潜模式。
11.优选的,所述舵向模块通过斜齿轮传动,并利用舵机带动斜齿轮将速度减弱,将转矩增强来带动两边的胸鳍与所述潜浮巡航交替模块的运动舵向偏转运动。
12.优选的,所述导流模块包括导流板,所述导流板设置在所述仿生蝠鲼的前端与后端,所述导流板由四个角的舵机驱动,所述导流板的运动方式为向着四个角与中心连线方向的开合运动。
13.优选的,所述重力变化模块具体通过吸收海水来增加整体的重力,通过大于浮力的重力使其下潜,所述重力变化模块的结构设置为针筒状,由丝杆的转动将旋转运动转化为直线运动带动针筒状结构内部的活塞运动,产生负压使其海水吸纳至所述仿生蝠鲼的内部使其增重。
14.优选的,所述垃圾收集系统用于收集垃圾的工作过程为:通过所述负压吸水模块产生负压,将水流通过所述单向导流模块导流至负压腔内,将海面的漂浮物垃圾随着水流进入所述垃圾仓内部,使负压吸水机构收缩,将负压腔内部的水流排除,通过所述单向导流模块上下的出口将水流排除,同时不影响已经收集的漂浮物垃圾。
15.优选的,所述单向导流模块包括三组活板门组成,三组所述活动门呈上下结构设置,中间的活板门为进口,上下的活板门为出口,负压腔张开时水流从中间的活板门进,负压腔收缩时水流由上下两侧的活板门出。
16.优选的,所述垃圾仓用于收集垃圾,所述两侧的卡扣由中间框架上的舵机固定,所述内部的滤网用于在处理装置上保证垃圾不粘连所述垃圾仓的内壁。
17.与现有技术相比,本发明的有益效果是:
18.(1)本发明通过将喷射推进式与仿生推进式两者结合,在仿生水下机器人的基础之上增加了潜航器的设计,可以实现高速巡航与缓速扑动的两种行进模式。
19.(2)本发明通过采用仿生蝠鲼水下机器人作为海洋垃圾的收集形式,相比垃圾船具有智能化、高效化、自动化的效果。
20.(3)本发明通过喷射推进式部分的巡航交替模块可以通过复合机构与联动机构的动作实现潜浮运动与喷射巡航两种模式的切换,结构紧凑,交替方便。
21.(4)本发明通过仿生蝠鲼鱼鳍采用柔性结构,以欠驱动拉绳柔性机构与连杆机构在上下鱼鳍的划分基础上形成弦向与展向的波动运动。
22.(5)本发明通过采用负压吸水的方式,通过组合机构的运动实现负压腔的收缩与扩张,可以实现采用负压水流吸收垃圾的效果,搭配单向导流模块运动,是一种稳定且节省能量的垃圾收集形式。
附图说明
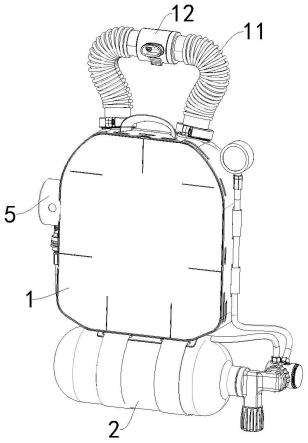
23.图1为本发明仿生蝠鲼的三维建模的结构示意图之一;
24.图2为本发明仿生蝠鲼的三维建模的结构示意图之二;
25.图3为本发明弦向波动模块建模的结构示意图;
26.图4为本发明展向波动模块建模的结构示意图;
27.图5为本发明潜浮巡航交替模块推进模式的结构示意图;
28.图6为本发明潜浮巡航交替模块浮潜模式的结构示意图;
29.图7为本发明舵向模块建模的结构示意图;
30.图8为本发明导流模块建模的结构示意图;
31.图9为本发明重力变化模块建模的结构剖视图;
32.图10为本发明负压吸水模块建模的结构剖视图;
33.图11为本发明单向导流模块建模的结构示意图;
34.图12为本发明垃圾仓模块建模的结构剖视图。
35.图中:1、导流模块;2、重力变化模块;3、单向导流模块;4、负压吸水模块;5、潜浮巡航交替模块;6、展向波动模块;7、垃圾仓模块;8、弦向波动模块;9、舵向模块。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.请参阅图1-图12,本发明提供一种技术方案:一种仿生蝠鲼,包括仿生推进式系统、喷射推进式系统和垃圾收集系统;
38.所述仿生推进式系统包括弦向波动模块8和展向波动模块6,所述展向波动模块6用于控制所述仿生蝠鲼的胸鳍在展向上的正弦波动;所述弦向波动模块8用于前后划分的上下鱼鳍通过舵机的摆动方向与相位的不同形成波动;
39.所述喷射推进式系统包括潜浮巡航交替模块5、舵向模块9、重力变化模块2和导流模块1,所述潜浮巡航交替模块5设置为所述喷射推进式系统的核心,所述潜浮巡航交替模块5用于实现喷射推进式行进与上下的电力推进式行进,所述舵向模块9用于控制所述潜浮巡航交替模块5的喷射方向,所述导流模块1用于位移在巡航高速运动的过程中减少涡流的产生;所述重力变化模块2用于调整重力,实现上浮与下潜;
40.所述垃圾收集系统包括负压吸水模块4、单向导流模块3和垃圾仓模块7,所述负压吸水模块4用于通过内部的负压机构实现负压腔的收缩,所述单向导流模块3用于对水流方向进行单向导流,所述垃圾仓模块7设置为可拆卸结构,所述垃圾仓模块7包括垃圾仓、两侧的卡扣和内部的滤网。
41.本实施例中,优选的,所述展向波动模块6是采用绳轮机构为主要原理的柔性机构,通过固定在绳轮上的拉绳的往复运动带动柔性鱼鳍运动。
42.本实施例中,优选的,所述弦向波动模块8采用连杆机构的原理,通过舵机驱动连杆,连杆带动内边有八边形的摇杆进行摆动,且所述弦向波动由鱼鳍波动表达式决定。
43.本实施例中,优选的,所述潜浮巡航交替模块5在推进式行进时流道为闭合状态,通过内部的两个水下推进式的驱动将水流通过前流道传输并从后流道中喷射出,通过已曲柄滑块机构为基础的连杆机构驱动前后流道的开合,中间的流道通过正弦机构带动剪式机构的原理驱动中部上下流道的分离,完成中间水下推进器的转向避开空间,经过机构的复合运动与联动实现流道的变化与水下推进器的转向,实现浮潜模式。
44.本实施例中,优选的,所述舵向模块9通过斜齿轮传动,并利用舵机带动斜齿轮将
速度减弱,将转矩增强来带动两边的胸鳍与所述潜浮巡航交替模块5的运动舵向偏转运动。
45.本实施例中,优选的,所述导流模块1包括导流板,所述导流板设置在所述仿生蝠鲼的前端与后端,所述导流板由四个角的舵机驱动,所述导流板的运动方式为向着四个角与中心连线方向的开合运动。
46.本实施例中,优选的,所述重力变化模块2具体通过吸收海水来增加整体的重力,通过大于浮力的重力使其下潜,所述重力变化模块2的结构设置为针筒状,由丝杆的转动将旋转运动转化为直线运动带动针筒状结构内部的活塞运动,产生负压使其海水吸纳至所述仿生蝠鲼的内部使其增重。
47.本实施例中,优选的,所述垃圾收集系统用于收集垃圾的工作过程为:通过所述负压吸水模块4产生负压,将水流通过所述单向导流模块3导流至负压腔内,将海面的漂浮物垃圾随着水流进入所述垃圾仓内部,使负压吸水机构收缩,将负压腔内部的水流排除,通过所述单向导流模块3上下的出口将水流排除,同时不影响已经收集的漂浮物垃圾。
48.本实施例中,优选的,所述单向导流模块3包括三组活板门组成,三组所述活动门呈上下结构设置,中间的活板门为进口,上下的活板门为出口,负压腔张开时水流从中间的活板门进,负压腔收缩时水流由上下两侧的活板门出。
49.本实施例中,优选的,所述垃圾仓用于收集垃圾,所述两侧的卡扣由中间框架上的舵机固定,所述内部的滤网用于在处理装置上保证垃圾不粘连所述垃圾仓的内壁。
50.本发明的原理及优点:本发明通过将喷射推进式与仿生推进式两者结合,在仿生水下机器人的基础之上增加了潜航器的设计,可以实现高速巡航与缓速扑动的两种行进模式;通过采用仿生蝠鲼水下机器人作为海洋垃圾的收集形式,相比垃圾船具有智能化、高效化、自动化的效果;通过喷射推进式部分的巡航交替模块可以通过复合机构与联动机构的动作实现潜浮运动与喷射巡航两种模式的切换,结构紧凑,交替方便;通过仿生蝠鲼鱼鳍采用柔性结构,以欠驱动拉绳柔性机构与连杆机构在上下鱼鳍的划分基础上形成弦向与展向的波动运动;通过采用负压吸水的方式,通过组合机构的运动实现负压腔的收缩与扩张,可以实现采用负压水流吸收垃圾的效果,搭配单向导流模块3运动,是一种稳定且节省能量的垃圾收集形式。
51.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。