技术特征:
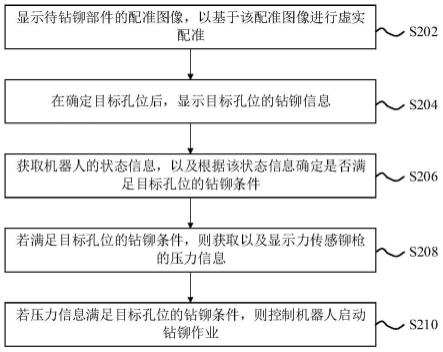
1.一种面向人机协作钻铆的虚实融合工艺引导方法,其特征在于,应用于增强现实设备,所述增强现实设备通过上位机与机器人、力传感铆枪分别连接,所述方法包括:显示待钻铆部件的配准图像,以基于所述配准图像进行虚实配准;在确定目标孔位后,显示所述目标孔位的钻铆信息;所述钻铆信息包括虚拟孔位位置;获取所述机器人的状态信息,以及根据所述状态信息确定是否满足所述目标孔位的钻铆条件;若满足所述目标孔位的钻铆条件,则获取以及显示所述力传感铆枪的压力信息;所述压力信息为所述力传感铆枪与所述目标孔位所在位置之间的抵接压力;若所述压力信息满足所述目标孔位的钻铆条件,则控制所述机器人启动钻铆作业。2.根据权利要求1所述的方法,其特征在于,所述方法还包括:获取以及存储所述目标孔位的钻铆各个过程中所述力传感铆枪的压力信息;所述钻铆各个过程包括以下至少一项:钻铆预备阶段、钻铆过程阶段、钻铆完成阶段。3.根据权利要求1所述的方法,其特征在于,所述钻铆信息还包括工艺信息;所述工艺信息包括以下至少一项:孔径、铆接方法、铆钉类型、力度。4.根据权利要求3所述的方法,其特征在于,所述方法还包括:显示跟随视野移动的虚拟操作面板,所述虚拟操作面板包括以下至少一项功能开关:显示工艺信息开关、配准跟踪开关、机器人控制功能按钮、选择下一个孔位功能按钮。5.根据权利要求1所述的方法,其特征在于,所述方法还包括:接收用户输入的孔位选择指令,以及根据所述孔位选择指令确定所述目标孔位。6.根据权利要求1所述的方法,其特征在于,在所述获取所述机器人的状态信息之前,所述方法还包括:控制所述机器人移动至所述目标孔位,以及执行所述目标孔位对应的钻铆准备动作。7.根据权利要求1所述的方法,其特征在于,所述方法还包括:在预先对所述待钻铆部件建模的情况下,根据模型目标的方式进行配准跟踪;在预先在所述待钻铆部件上布置定位标识的情况下,根据图像目标的方式进行配准跟踪。8.根据权利要求1所述的方法,其特征在于,所述状态信息包括以下至少一项:压脚状态、刀具进给状态、钻铆单元送钉状态。9.一种面向人机协作钻铆的虚实融合工艺引导系统,其特征在于,用于执行权利要求1-8任一项所述的面向人机协作钻铆的虚实融合工艺引导方法。
技术总结
本发明提供了一种面向人机协作钻铆的虚实融合工艺引导方法及系统,该方法采用虚实融合显示的方式对人机协作钻铆进行引导,包括增强现实信息显示、力度显示、机器人控制等功能的融合,通过增强现实信息显示可以免去工人查阅、记忆各类信息的时间精力,通过力度显示有利于准确的力度控制,通过增强现实设备控制机器人可以减少工人移动等操作,从而提高了工作效率。效率。效率。
技术研发人员:王党校 李东升 翟雨农 罗虎 李英龙 张玉茹
受保护的技术使用者:北京航空航天大学
技术研发日:2022.07.26
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。