1.本发明涉及生产线药浆清理技术领域,特别涉及一种药浆自动清理系统。
背景技术:
2.随着军工行业的不断发展,生产的军工产品越来越多,目前,国内生产火炸药在料斗等设备内残留的药浆都大多由人工清洗处理,该种清理方式有以下弊端:第一,料斗等设备的清理的过程完全采用人工操作,操作人员的劳动强度较大;第二,人工清理料斗等设备会更容易使其损坏;第三,人工清理料斗等设备会降低产线效率。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种药浆自动清理系统,用于在清理间内实现对残留在料斗和浇注工装内外表面的药浆进行自动无人清理,实现现场清理作业过程的无人化,降低劳动强度,保障人员安全。
4.为了实现上述目的,本发明采用以下技术方案:本发明提供一种药浆自动清理系统,包括外部轴机器人、料斗清理工具库、料斗清理总装、零件清理工具库及零件清理总装,其中料斗清理工具库设置于料斗清理总装的一侧,料斗清理工具库用于放置料斗清理工具,料斗清理总装用于定位料斗;零件清理工具库设置于零件清理总装的一侧,零件清理工具库用于放置零件清理工具,零件清理总装用于定位浇注工装零件;外部轴机器人用于完成料斗和浇注工装零件的清洗作业。
5.所述料斗清理总装和零件清理总装分别对应一套所述外部轴机器人;所述外部轴机器人包括清理机器人公头、六维力传感器、六自由度机器人、外部轴运动部件及外部轴底座,其中外部轴运动部件设置于外部轴底座上,外部轴运动部件具有水平直线运动的自由度;六自由度机器人设置于外部轴运动部件上,清理机器人公头通过六维力传感器与六自由度机器人的执行末端连接。
6.所述料斗清理工具库包括工具库架体ⅰ、工具库台板ⅰ及清理组件ⅰ,其中工具库台板ⅰ设置于工具库架体ⅰ的顶部,工具库台板ⅰ上设有多个清理组件ⅰ。
7.所述清理组件ⅰ包括工具头支架ⅰ、工具头ⅰ及工具快换头ⅰ,其中工具头支架ⅰ设置于所述工具库台板ⅰ上,工具头ⅰ放置于工具头支架ⅰ上,且工具头ⅰ的连接部设有工具快换头ⅰ。
8.所述料斗清理总装包括底架、料斗放置架及料斗抽屉,其中底架上设有多个料斗放置架,料斗放置架用于定位料斗,料斗抽屉设置于料斗放置架的底部,用于接收清理废料。
9.所述零件清理工具库包括工具库架体ⅱ、工具库台板ⅱ及清理组件ⅱ,其中工具库架体ⅱ的顶部设置工具库台板ⅱ,工具库台板ⅱ上设置多个清理组件ⅱ;清理组件ⅱ包括工具头支架ⅱ、工具头ⅱ及工具快换头ⅱ,其中工具头支架ⅱ设
置于工具库台板ⅱ上,工具头ⅱ放置于工具头支架ⅱ上,且连接端设有工具快换头ⅱ。
10.所述零件清理总装包括喷淋器清理总装、连接筒清理总装及花板清理总装,喷淋器清理总装用于定位喷淋器;连接筒清理总装用于定位连接筒;花板清理总装用于定位花板。
11.所述喷淋器清理总装包括喷淋器工装放置架、喷淋器放置架及喷淋器接料盒,其中喷淋器工装放置架上排列有多个喷淋器放置架,喷淋器放置架用于定位喷淋器,各喷淋器放置架的底部设有一喷淋器接料盒。
12.所述连接筒清理总装包括连接筒放置架组件、连接筒放置架及接料盒,其中连接筒放置架设置于连接筒放置架组件上,连接筒放置架用于定位连接筒,接料盒设置于连接筒放置架的底部。
13.所述花板清理总装包括花板放置架、花板固定组件及花板接料盒,其中花板放置架的顶部排列有多个花板固定组件,各花板固定组件用于定位一花板。
14.本发明的优点与积极效果为:1、本发明通过六维力传感器的应用实现柔性力度清理,机器人可根据六维力传感器力/力矩的反馈进行清理姿态的动态调整。
15.2、本发明针对不同产品设计多种快换工具头,以适应不同曲面清理,做到除上下料外全程无人,实现高危作业全程无人化。
16.3、本发明针对不同产品设计装卡工装,实现装卡产品柔性化,能快速完成产品的更换,以便于发明可适用于多种型号产品。
17.4、本发明针对不同产品设计的工装放置架,可在适应多种产品放置固定的同时,也能适应料盒不同位置的摆放,方便清理完成后人工取出,不同的产品采用立式/卧式柔性固定,是本发明适应多种型号的产品。
18.5、本发明在工作区外设计对射传感器,在工作区内人一旦进入,机器人自动停止,保证人的安全。
附图说明
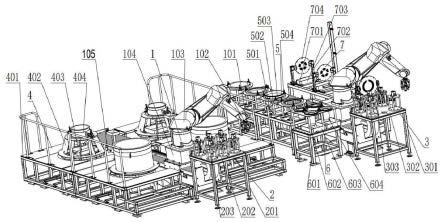
19.图1为本发明一种药浆自动清理系统的立体示意图;图2为本发明的外部轴机器人的立体示意图;图3为本发明的料斗清理工具库的立体示意图;图4为本发明的料斗清理工具库中清理组件的立体示意图;图5为本发明的零件清理工具库的立体示意图;图6为本发明的零件清理工具库中清理组件的立体示意图;图7为本发明的料斗清理总装的立体示意图;图8为本发明的喷淋器清理总装的立体示意图;图9为本发明的连接筒清理总装的立体示意图;图10为本发明的花板清理总装的立体示意图;图中:1为外部轴机器人,101为清理机器人公头,102为六维力传感器,103为六自由度机器人,104为外部轴运动部件,105为外部轴底座,2为料斗清理工具库,201为工具库架体ⅰ,202为工具库台板ⅰ,203为清理组件ⅰ,203-1为工具头支架ⅰ,203-2工具头ⅰ,203-3为
工具快换头ⅰ,3为零件清理工具库,301为工具库架体ⅱ,302为工具库台板ⅱ,303为清理组件ⅱ,303-1为工具头支架ⅱ,303-2为工具头ⅱ,303-3为工具快换头ⅱ,4为料斗清理总装,401为底架,402为料斗放置架,403为料斗抽屉,404为料斗,5为喷淋器清理总装,501为喷淋器工装放置架,502为喷淋器放置架,503为喷淋器接料盒,504为喷淋器,6为连接筒清理总装,601为连接筒放置架组件,602为连接筒放置架,603为接料盒,604为连接筒,7为花板清理总装,701为花板放置架,702为花板固定组件,703为花板接料盒,704为花板。
具体实施方式
20.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
21.如图1所示,本发明提供一种药浆自动清理系统,包括外部轴机器人1、料斗清理工具库2、料斗清理总装4、零件清理工具库3及零件清理总装,其中料斗清理工具库2设置于料斗清理总装4的一侧,料斗清理工具库2用于放置料斗清理工具,料斗清理总装4用于定位料斗;零件清理工具库3设置于零件清理总装的一侧,零件清理工具库3用于放置零件清理工具,零件清理总装用于定位浇注工装零件;外部轴机器人1用于完成料斗和零件的清洗作业。
22.本发明的实施例中,料斗清理总装4和零件清理总装分别对应一套外部轴机器人1。如图2所示,外部轴机器人1包括清理机器人公头101、六维力传感器102、六自由度机器人103、外部轴运动部件104及外部轴底座105,其中外部轴运动部件104设置于外部轴底座105上,外部轴运动部件104具有水平直线运动的自由度;六自由度机器人103设置于外部轴运动部件104上,清理机器人公头101通过六维力传感器102与六自由度机器人103的执行末端连接。
23.如图3所示,本发明的实施例中,料斗清理工具库2包括工具库架体ⅰ201、工具库台板ⅰ202及清理组件ⅰ203,其中工具库台板ⅰ202设置于工具库架体ⅰ201的顶部,工具库台板ⅰ202上设有多个清理组件ⅰ203。
24.如图4所示,本发明的实施例中,清理组件ⅰ203包括工具头支架ⅰ203-1、工具头ⅰ203-2及工具快换头ⅰ203-3,其中工具头支架ⅰ203-1设置于工具库台板ⅰ202上,且通过螺栓固定连接,工具头ⅰ203-2放置于工具头支架ⅰ203-1上,且工具头ⅰ203-2的连接部设有工具快换头ⅰ203-3。
25.具体地,工具库架体ⅰ201采用型材焊接结构,四只带座地脚嵌入工具库架体201中,完成料斗清理工具库2的固定,工具库台板ⅰ202与工具库架体ⅰ201通过螺栓连接的方式固定,清理组件ⅰ203与工具库台板ⅰ202通过螺栓连接同轴固定,完成清理工具的定位放置。
26.具体地,为与清理机器人公头101配合,所有工具快换头ⅰ203-3都采用相同设计,圆周方向有三个孔,与清理机器人公头101完成配合定位,径向方向定位孔与清理机器人公头101定位销完成配合,锁定四个自由度,完成精密紧凑定位。工具头ⅰ203-2主要负责清理料斗,共分为三种,分别对应清理料斗内壁的直段、锥段和底孔部位,残料的刮除均采用机器人旋转运动,清理工具的刮板在料斗内表面做螺旋转动,最终对料斗内壁进行全方位清理。
27.如图5所示,本发明的实施例中,零件清理工具库3包括工具库架体ⅱ301、工具库
台板ⅱ302及清理组件ⅱ303,其中工具库架体ⅱ301的顶部设置工具库台板ⅱ302,工具库台板ⅱ302上设置多个清理组件ⅱ303。
28.如图6所示,本发明的实施例中,清理组件ⅱ303包括工具头支架ⅱ303-1、工具头ⅱ303-2及工具快换头ⅱ303-3,其中工具头支架ⅱ303-1设置于工具库台板ⅱ302上,工具头ⅱ303-2放置于工具头支架ⅱ303-1上,且连接端设有工具快换头ⅱ303-3。
29.具体地,工具库架体ⅱ301与四个带座地脚共同完成工具库的稳定固定,工具库架体ⅱ301、工具库台板ⅱ302与清理组件ⅱ303之间彼此间螺栓连接固定。工具快换头ⅱ303-3与工具快换头ⅰ203-3相同,工具快换头ⅱ303-3分为工装清理工具头、花板清理工具头及喷淋器清理工具头,花板清理工具头清理刮板采用聚四氟材质的非金属材料,避免在清理残料时磕碰冲击发火现象。喷淋器清理工具有两种,斜边清理工具和底孔清理工具,喷淋器底孔清理工具头采用v形薄壁圆锥结构,v形薄壁圆锥最大直径尺寸略大于喷淋器直径,清理时六自由度机器人103带着清理头向下运动,v形薄壁圆锥清理头变形挤过直孔内壁,从而对内孔进行残料清理,连接筒清理工具结构与喷淋器底孔清理工具头类似。
30.如图7所示,本发明的实施例中,料斗清理总装4包括底架401、料斗放置架402及料斗抽屉403,其中底架401上设有多个料斗放置架402,料斗放置架402用于定位料斗404,料斗抽屉403设置于料斗放置架402的底部,用于接收清理废料。
31.具体地,一外部轴机器人1的两侧分别设置两组料斗清理总装4,一外部轴机器人1用于完成清理料斗的作业,以便提供工作效率。底架401的踏台底座高度575mm,一侧有踏步可以上人,方便操作人员对料斗内壁进行人工清理工作。在踏台底座中间位置设计有清理头刮料盒,一种清理头清理完产品后,刮板上可能残留药浆,为了避免六自由度机器人103携带清理头运动时药浆滴落,清理工作完成后,六自由度机器人103带清理头在刮料盒上刮一下,把清理头上的残料刮掉;同时,在清理工具放置架上配置两套清理工具,分别用于清理机器人两侧产品,清理完一侧产品后,机器人将清理工具放回清理工具放置架,再取用新的清理工具清理另一侧产品,避免机器人携带清理工具跨过运动单元时,有残留药浆滴落,在踏台底座上有四个料斗放置架402的安装位置,踏台底座外侧对应料斗放置架402的位置开有料斗抽屉403取送口,方便人工清理料斗抽屉403,料斗放置架402用来支撑固定料斗404,上面中空,中空尺寸比料斗外圆直径略大1mm,对料斗404起到定位作用,料斗404下部的锥形结构插入料斗放置架402内,料斗放置架402上面支撑料斗404下部的突出平面,在料斗404和料斗放置架402之间有导静电胶皮,在料斗放置架402上面设计有三个快速压钳,压住料斗404突出边上面,将料斗404牢固的固定在料斗放置架402上,料斗放置架402下边设计有料斗抽屉403定位槽,方便放置料斗抽屉403时,料斗抽屉403正好在料斗404出料口的正下方。
32.进一步地,底架401放有料斗波纹板及料斗架围栏,固定料斗放置架402及便于人工操作。料斗放置架402可柔性固定两种不同型号的料斗404,料斗放置架402上下两层均可放置料斗抽屉403,便于两种型号料斗的清理,在清理小型号料斗404时,设计小料斗支架与料斗放置架402通过螺栓拧紧的方式固定,支架上有两台固定器,以卧式方式固定料斗404。
33.如图1所示,本发明的实施例中,零件清理总装包括喷淋器清理总装5、连接筒清理总装6及花板清理总装7,喷淋器清理总装5用于定位喷淋器;连接筒清理总装6用于定位连接筒;花板清理总装7用于定位花板。
34.具体地,喷淋器清理总装5和连接筒清理总装6设置于另一外部轴机器人1一侧,花板清理总装7设置于另一外部轴机器人1的另一侧,整体布局紧凑,节省空间,提高工作效率。另一外部轴机器人1用于完成喷淋器、连接筒及花板的清理作业。
35.如图8所示,本发明的实施例中,喷淋器清理总装5包括喷淋器工装放置架501、喷淋器放置架502及喷淋器接料盒503,其中喷淋器工装放置架501上排列有多个喷淋器放置架502,喷淋器放置架502用于定位喷淋器504,各喷淋器放置架502的底部设有一喷淋器接料盒503。
36.具体地,喷淋器放置架502与料斗放置架402结构类似,喷淋器放置架502上面中空,喷淋器504可倒着插入喷淋器放置架502内,喷淋器放置架502上面支撑喷淋器504端口平面,喷淋器放置架502上面有两个定位销与喷淋器504的两个14mm孔配合定位,在喷淋器504和喷淋器放置架502之间有导静电胶皮。在喷淋器放置架502上面设计有三个快速压钳,压住喷淋器504端面,将喷淋器504牢固的固定在喷淋器放置架502上,喷淋器放置架502下边设计有接料盒定位槽,方便放置喷淋器接料盒503,喷淋器接料盒503正好在喷淋器504出料口的正下方。
37.如图9所示,本发明的实施例中,连接筒清理总装6包括连接筒放置架组件601、连接筒放置架602及接料盒603,其中连接筒放置架602设置于连接筒放置架组件601上,连接筒放置架602用于定位连接筒604,接料盒603设置于连接筒放置架602的底部。
38.具体地,连接筒放置架602共一件,同时可以放置四个连接筒604,连接筒放置架602上面设计有四个放置口,可将连接筒604插进连接筒放置架602内。每个放置口都设计有两个连接筒定位销,用来定位连接筒604,同时上面设计有四个快速压钳,一个压钳可同时压相邻两个连接筒604,在连接筒放置架602下部设计有接料盒定位槽用来对接料盒603定位,接料盒603通过限位块及滑轨定位于接料盒定位槽上,一个接料盒603可同时对四个连接筒604接残料。
39.如图10所示,本发明的实施例中,花板清理总装7包括花板放置架701、花板固定组件702及花板接料盒703,其中花板放置架701的顶部排列有多个花板固定组件702,各花板固定组件702用于定位一花板704。
40.具体地,花板704竖直状态安装在花板放置架701上,花板放置架701上有两个支撑杆,在支撑杆上有定位销,定位销与花板704直径位置上的两个14mm孔配合,将花板704挂在支杆上,使花板704呈竖直状态;同时将花板704两侧中间有残料区域避让开,方便向下刮除残料。为了保证花板704牢固,在两支杆上设计有两个弹簧压片,把花板704压在支架上,花板704下部设计有花板接料盒703,同时能对花板接料盒703粗定位,保证残料准确掉入花板接料盒703内。
41.如图2所示,本实施例中,六自由度机器人103是用来最终实现清理动作的执行者,选用负载为28kg的史陶比尔防爆机器人rx160,最大负载达到34kg,定位精度可以达到
±
0.05mm,最大工作半径为1710mm,滑台通过滑块连接在导轨上进行大范围直线运动导向,通过伺服电机减速器带动滚珠导轨丝杠,实现滑台高精度轴向平稳运动。为了防止药浆滴落到导轨丝杠上,在导轨上设计有防护罩进行保护。运动单元长3500mm,移动滑台轴向有效行程2700mm,行程满足四套料斗和三种四套工装的清理工作,六自由度机器人103机械手末端串联安装有清理机器人公头101、六维力传感器102,六维力传感器102用来在清理过程中对
清理力的实时感知和监控,实时回传力/力矩信号,防止六自由度机器人103刮伤料斗等部件表面六自由度机器人103也根据力矩的反馈值调整姿态,清理机器人公头101用来固定清理工具和更换清理工具,根据清理不同部件、不同位置选择不同清理工具。
42.本实施例中,清理机器人公头101用来固定清理工具和更换清理工具,清理机器人公头101包括三爪夹手、中心定位杆、气爪安装座、转接件,转接件实现清理机器人公头101与六维力传感器102的连接,三爪夹手在平行气缸的驱动下张开、合拢,其上的球头定位销进入工具快换头ⅰ203-3、工具快换头ⅱ303-3的球形槽内,同时夹指上的中心定位杆插进工具快换头ⅰ203-3、工具快换头ⅱ303-3的定位孔,锁紧了四个自由度,有效实现夹爪与清理工具紧固连接。
43.料斗清理工具库3共包含五种型号的工具头ⅱ303-2,包括清理座和清理刮板,清理座采用铜材质,清理刮板采用聚四氟材质的非金属材料,避免在清理残料时磕碰冲击发火现象,多种型号的工具头ⅱ303-2可做到针对不同喷淋器504、连接筒604、花板704产品,适应不同曲面的清理,做到除上下料外,全程无人,工具快换头ⅱ303-3是做到柔性连接不同工具头ⅱ303-2与清理机器人公头101的装置。
44.本发明提供的一种药浆自动清理系统,其工作原理为:本发明的外部轴机器人1用以高效完成料斗、喷淋器、花板和连接筒等设备的药浆清理,六自由度机器人103是最终实现清理动作的执行者,安装于外部轴运动部件104中的机器人底座上,外部轴运动部件104可使六自由度机器人103在其上完成相对滑动,增加机器人的工作范围,是机器人完成料斗404、喷淋器504、连接筒604、花板704清理的保障。机械手末端串联安装有六维力传感器102和清理机器人公头101,六维力传感器102用来在清理过程中对清理力的实时感知和监控,实时回传力/力矩信号,防止机器人刮伤料斗等部件表面。信号放大模块用于对六维力传感器102的差分输出信号进行放大,并输出放大后的模拟信号,信号采集模块对信号放大模块输出的模拟信号进行采集,并转化为数字信号,送入数据处理模块,数据处理模块对信号采集模块采集的数据进行处理,并送入信号传输模块,信号传输模块将六维力传感器解耦后的力/力矩值发送到对应的上位机。六自由度机器人103也根据力矩的反馈值调整姿态。清理机器人公头101用来固定清理工具和更换清理工具,根据清理不同部件和不同位置选择不同清理工具,以适应不同曲面的清理。料斗、花板等部件通过固定装置柔性固定,便于在固定架中放置不同类型的料斗、花板等,增加适用性。机器人清理完成后,不同型号的产品,接料盒位置不同,因此接料盒都能完成承接清理下的药浆,待清理完成后,人工抽出药浆并处理。
45.料斗放置架402可根据料斗型号柔性设计承载,设计两种型号的料斗404,通过卧式压紧固定与料斗放置架402上;喷淋器工装放置架501是喷淋器清理总装5的承载装置,喷淋器放置架502可完成四种不同喷淋器504的柔性放置,喷淋器接料盒503位于喷淋器504正下方,待清理完成后,人工运走清理下的料;连接筒清理总装6固定于连接筒放置架组件601上,连接筒放置架602可柔性装载定位多种连接筒604,连接筒604通过连接筒压块卧式固定,清理完成后,料下落于接料盒603中;花板清理总装7由花板放置架701支撑定位,花板固定组件702完成花板704的柔性立式固定,可固定两种型号的花板,待清理完成后后,清理下的料将进入花板接料盒703中。系统中含有一套对射传感器装置,当人在工作时误入机器人的运动范围内,则机器人自动停止操作,保证安全。
46.本发明提供的一种药浆自动清理系统,主要用于在清理间内实现对残留在料斗等容器内外表面的药浆进行自动清理,可以在保证效率和准确性的条件下,自动清理料斗、花板、连接筒喷淋器上的药浆,可以做到除上下料外全程无人,实现高危作业无人化;并针对不同产品设计多种工具快换头,适应不同曲面清理,并实现产品装卡柔性化,可适应多种产品。外部轴机器人将料斗、花板、连接筒、喷淋器表面的药浆刮除,刮除的药自流到托盘,无大量聚集,人工进入现场,将废料分包送室外。外部轴机器人运动半径覆盖所有工装放置、清理方位,运动方式满足料斗、花板、喷淋器、连接筒的清理,清理工作头可匹配不同的夹具(工作头),可夹取不同的清理工具采用刮除式等清理方式实现浇注料斗、连接筒、喷淋器、花板药浆的清理,清理机构工作头具备力的感知功能,当末端受力超限时即超限报警并紧急停止。本发明可实现现场清理作业过程的无人化,降低劳动强度,保障人员安全。
47.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。