技术特征:
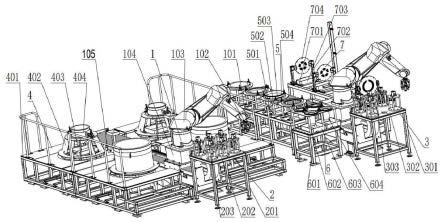
1.一种药浆自动清理系统,其特征在于,包括外部轴机器人(1)、料斗清理工具库(2)、料斗清理总装(4)、零件清理工具库(3)及零件清理总装,其中料斗清理工具库(2)设置于料斗清理总装(4)的一侧,料斗清理工具库(2)用于放置料斗清理工具,料斗清理总装(4)用于定位料斗;零件清理工具库(3)设置于零件清理总装的一侧,零件清理工具库(3)用于放置零件清理工具,零件清理总装用于定位浇注工装零件;外部轴机器人(1)用于完成料斗和浇注工装零件的清洗作业。2.根据权利要求1所述的药浆自动清理系统,其特征在于,所述料斗清理总装(4)和零件清理总装分别对应一套所述外部轴机器人(1);所述外部轴机器人(1)包括清理机器人公头(101)、六维力传感器(102)、六自由度机器人(103)、外部轴运动部件(104)及外部轴底座(105),其中外部轴运动部件(104)设置于外部轴底座(105)上,外部轴运动部件(104)具有水平直线运动的自由度;六自由度机器人(103)设置于外部轴运动部件(104)上,清理机器人公头(101)通过六维力传感器(102)与六自由度机器人(103)的执行末端连接。3.根据权利要求1所述的药浆自动清理系统,其特征在于,所述料斗清理工具库(2)包括工具库架体ⅰ(201)、工具库台板ⅰ(202)及清理组件ⅰ(203),其中工具库台板ⅰ(202)设置于工具库架体ⅰ(201)的顶部,工具库台板ⅰ(202)上设有多个清理组件ⅰ(203)。4.根据权利要求3所述的药浆自动清理系统,其特征在于,所述清理组件ⅰ(203)包括工具头支架ⅰ(203-1)、工具头ⅰ(203-2)及工具快换头ⅰ(203-3),其中工具头支架ⅰ(203-1)设置于所述工具库台板ⅰ(202)上,工具头ⅰ(203-2)放置于工具头支架ⅰ(203-1)上,且工具头ⅰ(203-2)的连接部设有工具快换头ⅰ(203-3)。5.根据权利要求1所述的药浆自动清理系统,其特征在于,所述料斗清理总装(4)包括底架(401)、料斗放置架(402)及料斗抽屉(403),其中底架(401)上设有多个料斗放置架(402),料斗放置架(402)用于定位料斗(404),料斗抽屉(403)设置于料斗放置架(402)的底部,用于接收清理废料。6.根据权利要求1所述的药浆自动清理系统,其特征在于,所述零件清理工具库(3)包括工具库架体ⅱ(301)、工具库台板ⅱ(302)及清理组件ⅱ(303),其中工具库架体ⅱ(301)的顶部设置工具库台板ⅱ(302),工具库台板ⅱ(302)上设置多个清理组件ⅱ(303);清理组件ⅱ(303)包括工具头支架ⅱ(303-1)、工具头ⅱ(303-2)及工具快换头ⅱ(303-3),其中工具头支架ⅱ(303-1)设置于工具库台板ⅱ(302)上,工具头ⅱ(303-2)放置于工具头支架ⅱ(303-1)上,且连接端设有工具快换头ⅱ(303-3)。7.根据权利要求1所述的药浆自动清理系统,其特征在于,所述零件清理总装包括喷淋器清理总装(5)、连接筒清理总装(6)及花板清理总装(7),喷淋器清理总装(5)用于定位喷淋器;连接筒清理总装(6)用于定位连接筒;花板清理总装(7)用于定位花板。8.根据权利要求7所述的药浆自动清理系统,其特征在于,所述喷淋器清理总装(5)包括喷淋器工装放置架(501)、喷淋器放置架(502)及喷淋器接料盒(503),其中喷淋器工装放置架(501)上排列有多个喷淋器放置架(502),喷淋器放置架(502)用于定位喷淋器(504),各喷淋器放置架(502)的底部设有一喷淋器接料盒(503)。9.根据权利要求7所述的药浆自动清理系统,其特征在于,所述连接筒清理总装(6)包
括连接筒放置架组件(601)、连接筒放置架(602)及接料盒(603),其中连接筒放置架(602)设置于连接筒放置架组件(601)上,连接筒放置架(602)用于定位连接筒(604),接料盒(603)设置于连接筒放置架(602)的底部。10.根据权利要求7所述的药浆自动清理系统,其特征在于,所述花板清理总装(7)包括花板放置架(701)、花板固定组件(702)及花板接料盒(703),其中花板放置架(701)的顶部排列有多个花板固定组件(702),各花板固定组件(702)用于定位一花板(704)。
技术总结
本发明涉及生产线药浆清理技术领域,特别涉及一种药浆自动清理系统。包括外部轴机器人、料斗清理工具库、料斗清理总装、零件清理工具库及零件清理总装,其中料斗清理工具库设置于料斗清理总装的一侧,料斗清理工具库用于放置料斗清理工具,料斗清理总装用于定位料斗;零件清理工具库设置于零件清理总装的一侧,零件清理工具库用于放置零件清理工具,零件清理总装用于定位零件;外部轴机器人用于完成料斗和零件的清洗作业。本发明用于在清理间内实现对残留在料斗和浇注工装零件内外表面的药浆进行自动无人清理,实现现场清理作业过程的无人化,降低劳动强度,保障人员安全。保障人员安全。保障人员安全。
技术研发人员:刘勇 王元钰 王军义 孙银金 丛郁楠 徐志刚
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:2022.11.07
技术公布日:2022/12/1
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。