技术特征:
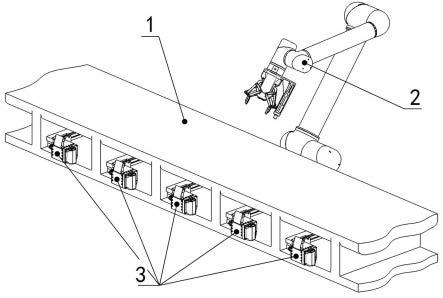
1.一种适用于柔性捆扎运输的紧固机械手,其特征在于,包括运输托架(1)及设置于运输托架(1)上的机械操作手(2)及多组紧固装置(3),其中多组紧固装置(3)沿运输托架(1)的长度方向依次间隔设置,紧固装置(3)用于对物体进行捆扎;机械操作手(2)用于实现紧固装置(3)的锁紧及解锁。2.根据权利要求1所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述紧固装置(3)包括绑带旋紧装置(4)、双向锁紧装置(5)及锁钩(6),其中双向锁紧装置(5)沿所述运输托架(1)的宽度方向设置于所述运输托架(1)上,绑带旋紧装置(4)和锁钩(6)分别设置于双向锁紧装置(5)的两端,且通过双向锁紧装置(5)的驱动相向或反向运动,通过绑带旋紧装置(4)与锁钩(6)的连接,实现对物体的捆扎。3.根据权利要求2所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述绑带旋紧装置(4)包括外壳(7)、外六角旋转输入轴(8)、绑带(9)、绑带卡扣(10)、齿轮传动机构、棘轮机构及绑带缠绕轴(15),其中外六角旋转输入轴(8)和绑带缠绕轴(15)垂直设置于外壳(7)内,且外六角旋转输入轴(8)通过齿轮传动机构与绑带缠绕轴(15)传动连接;绑带(9)的一端缠绕在绑带缠绕轴(15)上,另一端由外壳(7)上的导出口引出,绑带(9)的另一端端部与绑带卡扣(10)连接,绑带卡扣(10)上设有用于与所述锁钩(6)连接的通孔;棘轮机构设置于外壳(7)和绑带缠绕轴(15)上,用于控制绑带缠绕轴(15)单向旋转。4.根据权利要求3所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述棘轮机构包括棘轮(13)、棘轮爪(14)、轴(19)、顶紧组件及按钮组件,其中棘轮(13)固设于所述绑带缠绕轴(15)上;棘轮爪(14)为弯折结构,且两端分别为咬合端和按压端,棘轮爪(14)的弯折部通过轴(19)转动安装在所述外壳(7)上;顶紧组件和按钮组件均安装在所述外壳(7)上,顶紧组件与棘轮爪(14)的咬合端抵接,使棘轮爪(14)的咬合端与棘轮(13)咬合,使所述绑带缠绕轴(15)只能单向旋转;按钮组件与棘轮爪(14)的按压端相对应,通过按钮组件驱动棘轮爪(14)绕轴(19)转动,使棘轮爪(14)的咬合端脱离棘轮(13)。5.根据权利要求4所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述顶紧组件包括导向销和压簧ⅰ(18),其中导向销设置于所述外壳(7)的顶部,压簧ⅰ(18)套设于导向销上,且两端分别与所述外壳(7)和所述棘轮爪(14)的咬合端抵接。6.根据权利要求4所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述按钮组件包括按钮轴(20)、压簧ⅱ(21)及手动按钮(12),其中按钮轴(20)与所述外壳(7)滑动连接,按钮轴(20)的内侧端设有与所述棘轮爪(14)的按动端相对应的按压块,按钮轴(20)的外侧端设有手动按钮(12),压簧ⅱ(21)套设于按钮轴(20)上,且两端分别与所述外壳(7)和手动按钮(12)抵接。7.根据权利要求3所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述导出口设置于所述外壳(7)的顶部,且所述导出口处设有导向轮;所述外壳(7)的顶部还设有用于与所述绑带卡扣(10)插接的绑带卡扣插槽(11)。8.根据权利要求2所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述双向锁紧装置(5)包括安装架(22)、电机(23)、皮带传动组件(24)、右滑块(25)、右旋丝母(26)、双向旋丝杆、锁钩安装板(27)、导轨(29)、绑带旋紧装置安装板(33)、左旋丝母(34)及左滑块(35),其中安装架(22)与所述运输托架(1)连接,双向旋丝杆和导轨(29)平行设置于安装架
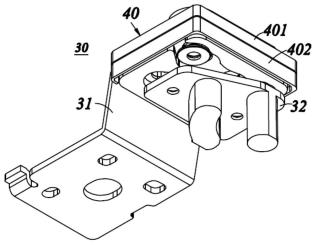
(22)上,且双向旋丝杆可转动;右旋丝母(26)和左旋丝母(34)与双向旋丝杆螺纹连接,电机(23)设置于安装架(22)上,且输出端通过皮带传动组件(24)与双向旋丝杆连接;右滑块(25)和左滑块(35)与导轨(29)滑动连接,锁钩安装板(27)与右滑块(25)和右旋丝母(26)连接,绑带旋紧装置安装板(33)与左滑块(35)和左旋丝母(34)连接。9.根据权利要求8所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述锁钩(6)包括固定钩(36)、活动锁鼻(37)、扭簧(38)及锁钩轴(39),其中固定钩(36)与所述锁钩安装板(27)连接,锁钩轴(39)安装在固定钩(36)上,活动锁鼻(37)的一端转动安装在锁钩轴(39)上,活动锁鼻(37)的另一端与固定钩(36)的末端相对应;扭簧(38)套设于锁钩轴(39)上,且两端分别与活动锁鼻(37)和固定钩(36)抵接,扭簧(38)使活动锁鼻(37)与固定钩(36)形成封闭环。10.根据权利要求1所述的适用于柔性捆扎运输的紧固机械手,其特征在于,所述机械操作手(2)包括七自由度机械臂、夹爪(40)和内六角旋转装置(41),其中七自由度机械臂安装在所述运输托架(1)的中间位置,七自由度机械臂的执行末端与夹爪(40)和内六角旋转装置(41)连接。
技术总结
本发明涉及机械手,特别涉及一种适用于柔性捆扎运输的紧固机械手。包括运输托架及设置于运输托架上的机械手及多组紧固装置,其中多组紧固装置沿运输托架的长度方向依次间隔设置,多个紧固装置用于对物体进行捆扎;机械手用于实现紧固装置的锁紧及解锁。本发明能实现在柔性捆扎运输的同时,始终对物体保持有效紧固,避免在运送过程中压坏、划伤物体表面。避免在运送过程中压坏、划伤物体表面。避免在运送过程中压坏、划伤物体表面。
技术研发人员:卜春光 郎智明 高英丽 眭晋 范晓亮 赵新刚 田建东
受保护的技术使用者:中国科学院沈阳自动化研究所
技术研发日:2022.11.03
技术公布日:2022/11/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。