1.本发明涉及机器人控制技术领域,尤其涉及一种机器人基于视觉伺服的自适应滑膜柔顺力控制方法。
背景技术:
2.当前主流的视觉力控制混合算法常常将力的控制量和视觉系统的控制量,通过一个协商机制混合输入到被控系统中,这种方法常常会造成系统不能同时满足力和视觉跟踪的控制要求或者使系统陷入局部最优解。同时在真实基于视觉伺服机器人系统中,机器人自身的参数会随着机器人的长时间使用发生变化,机器人的传感器反馈以及控制量的输出也会受到外部环境以及内部的电磁的干扰,这些因素都会对机器人的控制精度产生影响。
3.在基于视觉伺服机器人实际系统中对输入信号大于的输入限制时会产生输入饱和现象即输入会维持在机器人可接受的最大输入上,这种输入饱和现象也会对机器人的控制精度产生影响。
技术实现要素:
4.本发明的目的在于提供一种机器人自适应滑膜柔顺力控制方法,旨在解决现有基于视觉伺服机器人系统输入饱和现象会影响控制精度的问题。
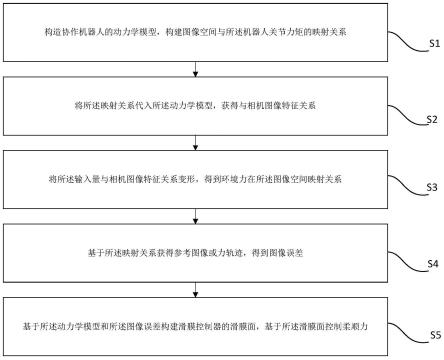
5.为实现上述目的,本发明提供了一种机器人自适应滑膜柔顺力控制方法,包括以下步骤:
6.构造协作机器人的动力学模型,构建图像空间与所述机器人关节力矩的映射关系;
7.将所述映射关系代入所述动力学模型,获得与相机图像特征关系;
8.将所述输入量与相机图像特征关系变形,得到环境力在所述图像空间映射关系;
9.基于所述映射关系获得参考图像或力轨迹,得到图像误差;
10.基于所述动力学模型和所述图像误差构建滑膜控制器的滑膜面,基于所述滑膜面控制柔顺力。
11.其中,所述构造协作机器人的动力学模型,构建图像空间与所述机器人关节力矩的映射关系的具体方式:
12.构造协作机器人的动力学模型;
13.基于所述动力学模型和机器人图像投影关系构建图像空间与所述机器人关节的对应关系。
14.其中,所述基于所述映射关系获得参考图像或力轨迹,得到图像误差的具体方式:
15.基于所述映射关系获得参考图像或力轨迹;
16.图像的自适应滑膜控制系统将所述参考轨迹或力轨迹与相机获取的图像特征做差获得所述图像误差。
17.其中,所述滑膜率为泄露型控制率。
18.本发明的一种机器人自适应滑膜柔顺力控制方法,构造协作机器人的动力学模型,构建图像空间的图像特征与所述机器人末端位姿的映射关系;将所述映射关系代入所述动力学模型,获得输入量与相机图像特征的关系;将所述输入量与相机图像特征关系变形,得到环境力在所述图像空间映射关系;基于所述映射关系,参考已知的目标图像轨迹与目标接触力信号获得修正过的参考图像轨迹,获得参考图像或力轨迹,所述基于图像的自适应滑膜控制系统将所述参考图像轨迹与相机获取的图像轨迹做差得到图像误差;基于所述辅助动力学模型和所述图像误差构建滑膜控制器的滑膜面,基于所述滑膜面控制柔顺力,该方法提出了视觉导纳模型将力投影到图像空间中并与目标轨迹融合成一个单一量纲的期望目标值,通过基于图像的自适应滑膜控制器追踪期望目标,提高系统鲁棒性的同时也能降低滑膜控制的固有振动,同时相较于传统控制器在存在输入饱和时控制更稳定,保证机器人系统控制精度,解决现有基于视觉伺服机器人系统输入饱和现象会影响控制精度的问题。
附图说明
19.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.图1是本发明提供的一种机器人自适应滑膜柔顺力控制方法的动力学模型示意图。
21.图2是本发明提供的一种机器人自适应滑膜柔顺力控制方法示意图。
22.图3是本发明提供的一种机器人自适应滑膜柔顺力控制方法的流程图。
23.图4是构造协作机器人的动力学模型,构建图像空间与所述机器人关节的对应关系的具体方式流程图。
具体实施方式
24.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
25.请参阅图1至图4,本发明提供一种机器人自适应滑膜柔顺力控制方法,包括以下步骤:
26.s1构造协作机器人的动力学模型,构建图像空间与所述机器人关节力矩的映射关系;
27.具体的,构造协作机器人的动力学模型,构建图像空间内的图像特征与所述机器人末端位姿的映射关系。
28.具体方式:
29.s11构造协作机器人的动力学模型;
30.具体的,构造协作机器人的动力学模型,如公式1所示:
[0031][0032]
s12基于所述动力学模型和机器人图像投影关系构建图像空间与所述机器人关节的对应关系。
[0033]
具体的,其中m为惯性矩阵,c为科里奥利矩阵,g为重力向量,j为雅可比矩阵,fe为环境接触力,γd为输入干扰量,γ
sat
为存在输入饱和现象的输入量,其输入饱和现象如公式2所示:
[0034][0035]
s2将所述映射关系代入所述动力学模型,获得与相机图像特征关系;
[0036]
具体的,将所述对应关系代入所述动力学模型,获得机器人的各关节驱动力矩与相机观测得到的图像特征的关系。
[0037]
具体的,
[0038][0039][0040]
其中s为图像特征,q为机械臂关节转动角度,js为图像雅可比矩阵ls为视觉伺服常用的图像转换矩阵,te为相机空间与笛卡尔空间的旋转转换矩阵。
[0041]
将公式3代入到公式1中可以获得输入量γ
sat
(力矩)与相机图像特征s之间的关系如公式4所示:
[0042][0043]
其中,
[0044][0045][0046][0047]
表示图像空间内关于图像特征的科里奥利矩阵;符号“* ”为伪逆运算符。
[0048]
机器人参考图像或力轨迹生成器会基于反馈力和目标力差值以及目标图像轨迹通过一个视觉导纳模型生成一个图像空间的参考图像或力轨迹,作为自适应滑膜控制器的追踪信号,其计算过程如下:
[0049]
将力传感器视为一个弹簧质量阻尼模型,其公式可表示为:
[0050][0051]
其中be,de,ke为模型的质量,阻尼,弹性系数,e
p
为力参考轨迹与目标轨迹的误差
(目标轨迹在接触面上)。
[0052]
s3将所述输入量与相机图像特征关系变形,得到环境力在所述图像空间映射关系;
[0053]
具体的,将协作机器人与接触环境的接触力通过一个质量弹簧阻尼模型进行描述,并将此模型投影到图像空间,得到接触力在所述图像空间映射关系。
[0054]
具体的,
[0055][0056]
其中:
[0057]fs
=jsm-1
γ
sat
[0058]cs
=jsm-1c[0059]bs
=jsm-1
(g γd)
[0060]
fsext=jsm-1jt
fe=j
sf
fe[0061]
在公式5两边同时乘jsm-1
j,
[0062]
可以获得力传感器模型的变式:
[0063][0064]
其中,b
sext
=j
sfbe
,d
sext
=j
sfde
,k
sext
=j
sf
ke。
[0065]
由于在机器人和环境接触中,将公式3代入公式7中,可以得到力传感器模型在图像空间的映射关系,如公式8所示:
[0066][0067]
其中,
[0068][0069]es
表示在图像空间中参考轨迹和目标轨迹的误差。在稳定状态下es的二阶导数课视为0,通过求解公式8可以获得:
[0070][0071]
定义一个力触觉反馈的控制率:
[0072][0073]
其中,k
p
和ki分别为正常数增益;
[0074]ef
=f
d-fe,
[0075]
fd为目标力信号,fe为反馈力。
[0076]
s4基于所述映射关系获得参考图像或力轨迹,得到图像误差;
[0077]
具体的,基于所述映射关系,参考已知的目标图像轨迹与目标接触力信号获得修正过得实时参考图像轨迹,机器人通过追踪上述参考图像轨迹的方式达到同时实现精准的
位置控制与柔顺力控制的目的。
[0078]
具体的,将公式10代入到公式9中便可以获得视觉空间的参考图像或力轨迹sr。
[0079]
获得参考图像或力轨迹后,基于图像的自适应滑膜控制系统会将参考轨迹与相机获取的图像特征做差获得图像误差esf作为构建滑模面的一个重要参数,同时为了减小输入饱和现象的影响,自适应滑膜控制系统使用了一个辅助动力学模型如公式11所示:
[0080][0081]
其中h为常数。
[0082]
由于自适应滑膜控制器的输入量为图像空间的误差,故参考量r需要构建为饱和误差关于图像空间的投影器结构为:
[0083]
δr=jsm-1
δγ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0084]
其中δγ=γ
sat-γd,γd为饱和输出和理想输出的差值。
[0085]
s5基于所述动力学模型和所述图像误差构建滑膜控制器的滑膜面,基于所述滑膜面控制柔顺力。
[0086]
具体的,
[0087]
其中ec=e
sf-ξ
′1,λ为正对角阵。
[0088]
其滑膜控制率为:
[0089]
γ=γ0 γ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0090]
其中
[0091][0092][0093]
k为自适应滑膜控制参数,
[0094]
k=diag{k1…
,kn},
[0095]
φ=diag{φ1…
,φn}为正对角常数矩阵,为提提高系统的鲁棒性,降低不确定性以及干扰对系统控制精度的影响采用泄露型控制率,控制量如公式17所示:
[0096]ki
=|ji|-μ
iki
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0097]
其中定义μi为正常数,ki的初始值为正数,即ki(0)》0。
[0098]
通过上述的自适应滑模控制系统获得控制输出量γ,这个控制输出量通过饱和模型生成γ
sat
,最终输入到机器人系统中。
[0099]
对于机器人实现图像轨迹追踪的控制器,本发明一种带辅助动力学的自适应滑膜控制器,首先根据图像追踪的实时误差,设计一个辅助动力学观测器,根据辅助动力学模型与图像误差,构建滑膜控制器的滑膜面,基于所述动力学模型和所述空间误差构建滑膜控制器的滑膜面,为提高系统鲁棒性,提高系统对不确定的外部干扰的抗干扰性,设计自适应泄露型滑膜控制率以实现高精度的图像追踪。该方法将空间接触力投影到图像空间中并与目标轨迹融合成实时修正的参考图像轨迹,并通过带辅助动力学的自适应滑膜控制器追踪期望目标,其可以有效解决在系统控制输入存在饱和的情况下的快速高精度的图像轨迹追
踪问题。较于传统控制器在响应速度,鲁棒性,抗干扰性上的控制效果更好,可以保证协作机器人系统同时实现高精度的位置控制与接触力的柔顺控制。
[0100]
以上所揭露的仅为本发明一种专利名称较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。